基于转矩补偿的无刷直流电机直接转矩控制分析
2015-10-14 03:21张飞刘选谭涛
河南科技 2015年23期
张 飞 刘 选 谭 涛
(长沙理工大学汽车与机械工程学院,湖南 长沙 410114)
基于转矩补偿的无刷直流电机直接转矩控制分析
张飞刘选谭涛
(长沙理工大学汽车与机械工程学院,湖南长沙410114)
无刷直流电机转矩脉动在直接转矩控制过程选择正确的矢量电压产生影响,在控制系统中加入转矩的前馈补偿,用来削弱转矩脉动对开关表选择产生的误差,使得电机在运行过程中在每个扇区都能获取合适的矢量电压,并输出预期的转矩,从而提高直接转矩控制对转矩脉动抑制效果。通过仿真验证,运用转矩补偿的直接转矩控制能很好的抑制转矩脉动。
无刷直流电机;转矩补偿;直接转矩控制;转矩脉动
无刷直流电机(Brushless DCmotor,)具有能量密度大、控制简单、运行稳定和调速性能好等优点,已在很多领域得到广泛的应用。由于齿槽转矩、非理想反电动势、电流不恰当的换相等因素会导致其输出转矩容易产生脉动[1]。为了提高控制系统的动态特性,降低转矩脉动,近年来直接转矩控制(Directed Torque Control,DTC)已成为无刷直流电机控制研究的重点内容,文献[2]结合直接转矩控制与分段式滑模变结构的特点,对无刷直流电机的反电动势状态进行重构,很好地提高了整个控制系统响应速度和稳定性,实现转矩脉动抑制。文献[3]提出了一种无磁链观测条件下电机转矩的直接控制,无刷直流电机120°导通的特点,通过对电机转矩的控制实现对电流的控制,通过减小电流的脉动来减小电机输出转矩脉动,同时保证了电机稳定运行。文献[4]提出无一种磁链自控直接转矩控制方案,根据转矩偏差进行滞环调节,根据滞环调节器测输出信号和转子所在位置决定输出相应的电压矢量,以实现磁链的自控制,有效地降低电流换相过程中引起的转矩脉动。尽管学者们在直接转矩控制研究方向获得很多成果,但是直接转矩控制仍然存在问题,如何在此基础上进一步的降低转矩脉动也是研究热点。
本文提出对直接转矩控制过程中转矩补偿的方式来进一步降低电机的转矩脉动。电机的转矩脉动贯穿与其运行的整个阶段,随着电机转速、负载不同其脉动大小不同,虽然直接转矩控制可以降低转矩脉动,但不能完全消除转矩脉动,这种脉动的存在极大的影响了控制系统稳定性,尤其是在电压矢量开关的选择中,可能导致选择不正确的电压矢量,不能达到预期的输出转矩,转矩脉动抑制效果不明显。加入转矩补偿后可以削弱转矩脉动对控制信号产生的影响,对期望转矩波动进行补偿,使其能够准确的选择电压矢量开关,在每个扇区都能获取给定方向的转矩,使电机按照给定方向平稳转动。
1 无刷直流电机数学模型
无刷直流电动机主要是由电机本体、转子位置传感器和电子开关线路3部分组成,并以电子换向取代传统机械换向的直流电机。以三相绕组为例,绕组完全对称、星形连接,且没有中线,同时假设磁路不饱和,不计涡流和磁滞损耗,,则无刷直流电机三相绕组的电压平衡方程为:

式中:Ua,Ub和Uc为定子绕组a、b、c三相电压;R为绕组电阻;Ia,Ib和Ic为a、b、c三相电流;Ea,Eb和Ec为定子绕组的三相反电动势;L为相绕组的自感与互感之差;P为微算分子,即
根据电磁感应原理,无刷直流电机的电磁转矩可以表示为磁链的函数:

2 直接转矩控制
由式(2)可知,电机输出的电磁转矩由定子形成磁链的幅值、转子形成磁链的幅值和磁通角大小所决定。由于电机运行过程中转子磁链的幅值不变,所以只能通过控制定子形成的磁链和改变磁通角的大小来调整电磁转矩的大小。定子磁链的运动方向取决于施加电压矢量的方向,并沿着电压矢量的方向运动。当根据位置传感器确定出转子磁链位置后,由定子磁链与转子磁链的空间垂直关系判断出定子磁链的位置,结合电压矢量开关表与对应的位置关系施加当期位置的电压矢量,定子磁链就可以随着电压矢量改变而运动,运动轨迹为正六边形。因此,通过判断定子磁链的扇区位置,结合转矩滞环调节器输出的滞环信号选择施加相应的电压矢量,达到对电机转矩进行直接控制的目的[5]。
直接转矩控制系统的外环为速度环,内环为转矩环。控制系统首先由目标转速与输出转速的偏差经PI调节得到期望转矩,再将期望转矩与估计转矩的偏差送入滞环调节器,根据滞环调节器输出的τ值来确定矢量开关。当偏差大于滞环调节器的调节阈值时,τ=1要求增大电磁转矩,施加正向电压矢量,使得磁通角增大;当偏差在滞环调节器的调节阈值以内时,τ=0要求保持电磁转矩,施加0电压矢量,使得磁通角不变,电磁转矩不变;当偏差小于滞环调节器的调节阈值时,τ=-1要求减小电磁转矩,施加反向电压矢量,使得磁通角减小,开关表如表1所示。

表1 直接转矩控制电压矢量选择

Ⅲ011 V4(010010) V0 V1(100001)Ⅳ001 V5(000110) V0 V2(001001)
由于转矩脉动会使期望转矩与估计转矩都产生波动,在某一时刻期望转矩与估计转矩的偏差会产生偏大偏小的状态,这样使在滞环调节器出τ值产生误差,会出现选择到错误的电压矢量,不能保证每个扇区都能输出所需要的期望转矩。提出一种运用转矩补偿的方法来减小转矩脉动引起的转矩偏差不准确的影响,通过将期望转矩与估计转矩偏差做PI控制的调节,确定对期望转矩进行的转矩补偿量,将补偿量与期望转矩相加之后再与估计转矩进行偏差,将之后的偏差输入到滞环调节器中输出正确的τ值,来对电机的输出转矩进行实时控制。带有期望转矩补偿的控制系统结构图如图1所示。

图1 带有转矩补偿的直接转矩控制系统
3 仿真结果分析
为了验证本文所提控制策略对转矩脉动的抑制效果,对无刷直流电机直接转矩控制在Simulink中进行了仿真,参数设置如表2所示:
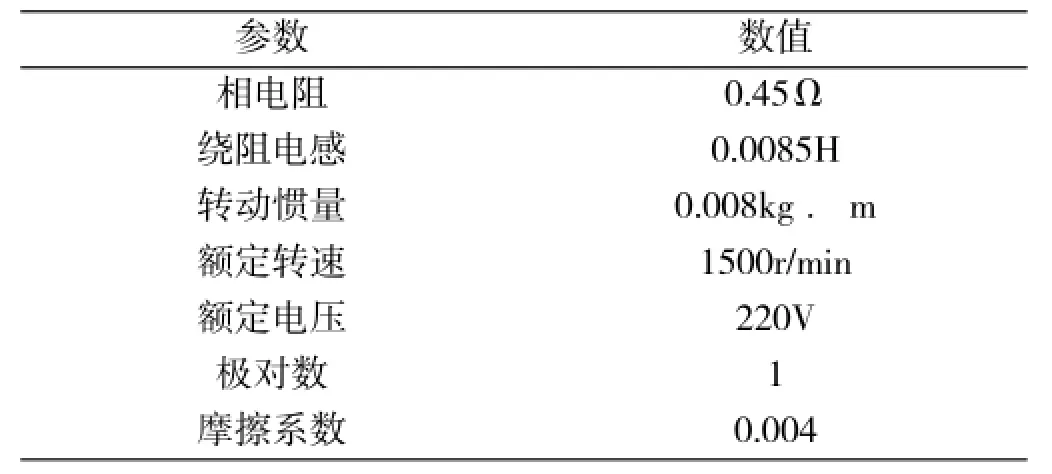
表2 无刷直流电机参数
仿真设定在0~0.1s之间电机在空载下启动,在0.1s以后给电机施加10N·m的负载转矩。为了直观的看出带有转矩补偿无刷直流直接转矩控制系统对电机输出转矩脉动的抑制效果下图2给出转矩脉动的对比,通过式(4)计算转矩波动系数,无转矩补偿的转矩波动系数为0.18,有转矩补偿的转矩波动系数为0.10,转矩波动系数下降的0.08 ,可以看出带有转矩补偿无刷直流电机直接转矩控制的输出转矩可以更有效的降低电机的输出转矩脉动,使电机运行更加平稳。

式中:η为转矩波动系数;Tmax,Tmin和Tmean分别为电机输出转矩的最大值,最小值和平均值。

图3 电机输出转矩对比
4 结语
本文通过对无刷直流电机直接转矩控制分析,提出了一种转矩补偿的的方式来减小转矩波动对直接转矩控制系统矢量电压选择中产生的影响,从而进一步的降低无刷直流电机的转矩脉动,将期望转矩与估计转矩偏差通过PI控制获取到转矩脉动扰动量,然后将扰动量补偿给电机的控制过程中的期望转矩,仿真结果表明该方法能够降低转矩脉动对矢量电压选择时产生的误差,能够更好减小电机的转矩脉动。
[1]夏长亮,方红伟.永磁无刷直流电机及其控制[J].电工技术学报,2012,17(3):25-34
[2]朱俊杰,粟梅,王湘中,马林.分段式滑模变结构无刷直流电机直接转矩控制[J].仪器仪表学报,2013,34(11):2634-2640.
[3]杨建飞,胡育文.无刷直流电机无磁链观测直接转矩控制[J].中国电机工程学报,2011,31(12):90-95
[4]安群涛,孙立志,刘超等.无刷直流电机的磁链自控直接转矩控制[J].中国电机工程学报,2010,16(12):86-92.
姚永峰(1987.05-),男,研究生,助理工程师,主要从事结构设计方面工作。
TM33
A
1003-5168(2015)-12-0047-2
猜你喜欢
大电机技术(2022年5期)2022-11-17
中国特种设备安全(2022年3期)2022-07-08
汽车实用技术(2022年12期)2022-07-05
电机与控制应用(2022年4期)2022-06-27
电子制作(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07
电测与仪表(2016年10期)2016-04-12
电测与仪表(2016年7期)2016-04-12
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
舰船科学技术(2015年8期)2015-02-27