Mecanum轮式机器人运动分析与结构设计①
2015-10-12 23:54黄达城贾茜朱奇滨俞金华
科技创新导报 2015年19期
黄达城 贾茜 朱奇滨 俞金华

摘 要:Mecanum轮式机器人是一种能够实现前后运动、侧向平移以及绕中心旋转等运动的全方位移动机器人。该机器人运动灵活,控制简单,但车轮机构复杂,对不平路面的适应能力较差。在运动学分析的基础上,本研究设计了一款能够用于微弱不平路面的Mecanum轮式机器人。该机器人采用两端支撑结构的车轮,车体设计考虑了车轮与地面的接触以及减震问题,具有较好的适应性和实用性。
关键词:全方位移动 机器人 运动分析 结构设计
中图分类号:TP242 文献标识码:A 文章编号:1674-098X(2015)07(a)-0004-02
随着机器人学及相关技术的发展,移动机器人在越来越多的行业和领域协助或代替人类从事各种危险、枯燥、繁重的工作,在人们的生产和生活中发挥着日益重要的作用。Mecanum轮式机器人是一种研究较早、技术较成熟的全方位移动机器人[1-2]。与普通轮式移动机器人相比,它除了能够前进、后退和沿圆弧运动外,还可以侧向平移和绕机器人中心旋转。尤其适合拥挤的办公室、狭窄的走廊和船舱、设备密布的车间等狭小、拥挤空间的作业。由于运动灵活、结构简单,Mecanum轮式机器人在加工制造业、医疗康复、娱乐与服务等领域得到了较广泛的应用。
1 运动分析
Mecanum轮式机器人通常由三个或四个Mecanum轮构成,通过特殊的车轮结构以及车轮间的配合实现平面内三自由度的运动。Mecanum轮由轮毂和安装在轮毂外缘上的一组鼓形辊子组成,辊子轴线与车轮轴线通常呈45o角,当车轮滚动时,小辊子就会产生侧向的运动。为了保证运动的平滑性,车轮的侧视图为圆形。
本研究针对四轮结构的机器人展开研究,为了分析其运动性能,建立如图1所示的机器人坐标系XOY[3]。其中四个车轮的转速为,机器人平台的速度为,辊子与车轮轴线的夹角为,车轮半径为R,车轮中心到车体中心沿X轴和Y轴方向的距离分别为a和b。车轮速度用Vwi(i=1,2,3,4)表示,接触地面的辊子的速度为Vri。
利用速度的分解与合成,可以得出机器人速度与车轮转速间的关系,如公式1所示。因此,通过四个车轮转速的相互配合,机器人可以从当前位置向工作平面的任意位置和方向运动。
(1)
2 结构设计
移动机构是Mecanum轮式机器人灵活运动的基础。为了实现全方位运动,四个车轮应按照图1布局,其余的安装方式无法完成平面内三自由度的运动[4]。此外,车轮和车体的结构设计也需要综合考虑运动性能和工艺要求。
2.1 车轮结构设计
Mecanum轮常见的结构有两种:两端支撑和中间支撑结构,如图2所示。两端支撑结构的车轮其刚性和承载能力较好,但外侧的轮缘容易与地面发生摩擦,限制了机器人在坡道以及不平路面的运动。中间支撑结构由于辊子被分为两部分,刚性和承载能力有所下降,但路面适应能力较好。此外,由于车轮与地面多为单点接触,辊子容易磨损,中间支撑结构能够较方便的更换辊子。
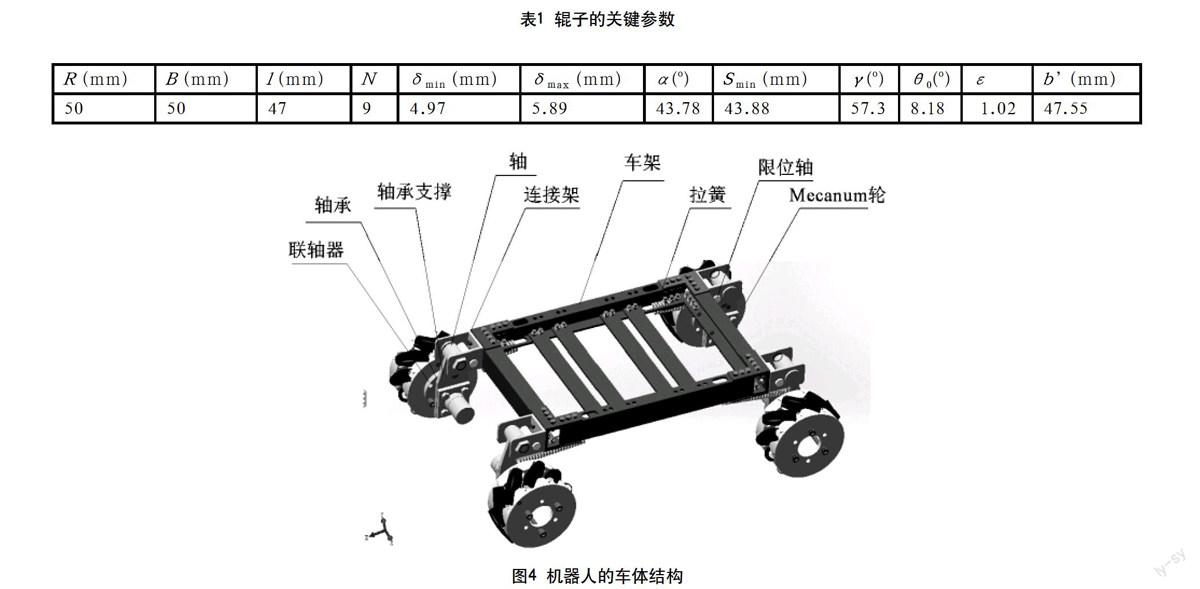
为了保证车轮运动的连续性,辊子轮廓线为等速螺线[5]。本研究设计一款两端支撑机构的车轮,车轮半径选取R=50mm,车轮设计宽度B=50mm,通过计算可以得出辊子长度l=47mm,辊子个数N=9,具体参数见表1。其中δmin和δmax为辊子轮廓上点到辊子轴线的最小和最大距离,α为辊子轴线与车轮轴线的夹角,Smin是辊子轴线与车轮轴线的最小距离,γ为螺旋线与车轮轴线的夹角。θ0为辊子轮廓的端点的投影与坐标轴的夹角,ε为运动连续性比率系数,b为车轮的实际宽度。辊子轮廓曲线如图3所示,其中横轴沿辊子轴向,纵轴沿辊子径向。图2(b)为这款Mecanum轮的三维结构图。
2.2 车体设计
根据机器人的运动分析,要实现完整的全方位运动,四个车轮必须独立驱动且保证四轮与地面的接触。因此,设计了如图4所示的Mecanum轮式机器人。其中,拉簧保证车轮与路面的接触,同时起到减震作用。联轴器和轴承将车轮与电机连接到一起,保证从电机到车轮的力矩的传递。轴承支架、轴和连接架将车轮安装在车架上,同时车轮又可以做一定角度的摆动,而限位轴用于限制车轮较大幅度的摆动。这样,车轮既能保证与地面的接触又不会因摆动幅度太大而出现失稳。
3 结语
通过分析Mecanum轮式机器人的运动学特性,研究了该机器人的运动规律并以此为基础设计了一款全方位移动机器人。该机器人的车轮采用了两端支撑结构,车体采用拉簧连接保证其与地面良好的接触性和减震性。因此,这种机器人能够在微弱不平路面上实现全方位运动。
参考文献
[1] 赵冬斌,易建强,邓旭玥.全方位移动机器人的结构和运动分析[J].机器人, 2003,25(5):394-398.
[2] 王兴松.Mecanum轮全方位移动机器人技术及其应用[J].机械制造与自动化,2014(3):1-6.
[3] Muir P F, Neuman C P. Kinematic modeling for feedback control of an omnidirectional wheeled mobile robot[C]. Proceedings of the 1987 IEEE International Conference On Robotics and Automation,1987: 1772-1778.
[4] 王一治,常德功.Mecanum四轮全方位系统的运动性能分析及结构形式优选[J].机械工程学报,2009,45(5):307-310.
[5] 石维亮,王兴松,贾茜.基于Mecanum轮的全向移动机器人的研制[J].机械工程师,2007(9):18-21.
猜你喜欢
建材发展导向(2023年6期)2023-03-31
房地产导刊(2022年5期)2022-06-01
建材发展导向(2021年13期)2021-07-28
金桥(2019年10期)2019-08-13
专用汽车(2016年5期)2016-03-01
中国房地产业(2016年2期)2016-03-01
中国房地产业(2016年24期)2016-02-16
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07