
双排行星齿轮系统的静态均载特性行为
2015-10-11 08:58盛冬平朱如鹏靳广虎陆凤霞鲍和云
中南大学学报(自然科学版) 2015年10期
盛冬平,朱如鹏,靳广虎,陆凤霞,鲍和云
双排行星齿轮系统的静态均载特性行为
盛冬平,朱如鹏,靳广虎,陆凤霞,鲍和云
(南京航空航天大学机电学院,江苏南京,210016)
建立双排行星齿轮传动系统的计算模型,并针对其进行静态均载特性行为的理论研究。模型中考虑各级行星齿轮的偏心误差,静态传递误差,时变啮合刚度等参数,并利用傅里叶级数法求解系统载荷平衡方程。定性地研究行星轮的偏心误差,齿圈的支撑刚度,行星轮的支撑刚度以及一级行星架的扭转刚度等参数对系统静态均载特性行为的影响,并据此得到一些理论分析结果。该研究延伸和扩展了对双排行星轮系均载特性行为的认识,并为进一步进行动力学均载行为的理论和实验研究形成一定的基础,同时也为双排行星轮系的设计提供一定的 参考。
双排行星齿轮系;静态均载;支撑刚度;偏心误差;扭转刚度
行星齿轮传动系统具有空间紧凑、高功率密度以及低噪声等特性,使得其在实际应用中比平行轴传动系统具有更广泛的应用前景。行星轮系包含多个行星轮以用来传递和分解作用在轮系中的某一构件上(太阳轮、内齿圈或行星轮)的输入扭矩,这极大地降低了单对齿轮啮合对之间的啮合力,同时也有效地减少了空间的占用。然而,由于系统存在制造误差、安装误差以及磨损等因素,导致作用在每个行星轮上的载荷分布不一致。有关于行星齿轮传动的均载特性的问题,国内外众多学者已经进行了大量的理论和实验研究,也提出了很多新的模型和方法,有些已经得到论证,并应用于工程。Seager[1]提出利用一个简化的模型来证明浮动的太阳轮对具有3~6个行星轮传动系统均载性能的重要性。Kahraman[2]构建了一个行星齿轮系的动力学模型,该模型可以用来设定具有任意个数的行星轮,以及任意可能的相应的齿轮尺寸和公差带,和固定或者浮动的太阳轮,同时针对其提到的相关变量进行了有限的参数化研究。Kahraman[3]利用数学模型和实验,再次研究了行星齿轮系统的均载特性,并且借助一个含有4个行星轮的实验来验证其数学模型。Bodas等[4]利用建立行星轮系的有限元模型来研究各种误差对均载特性行为的影响,最后,他们根据各种误差对均载特性的不同影响将其分为3个不同类别。Ligata等[5]在Kahraman[3]研究基础上进行了进一步的研究,但只是在他们的理论研究中增加了行星轮的个数以及扭矩等参数,且实验结果和理论分析获得了一致。Ligata等[6]和Singh[7]提出了一个简化的模型用来预测行星轮的均载特性。其他的一些理论研究包括Gu等[8]和Montestruc[9]都证实了之前的研究。最新的研究由 Boguski等[10]完成,他们提出一个新的方法来测量行星齿轮系中行星轮的均载和太阳轮的径向运动轨迹。一些国内外学者还针对行星轮弹性支撑轴进行了理论和实验研究,认为弹性支撑轴可以改善行星轮系的均载性能。Hicks[11]提出一个新的方法来使行星轮获得更低的支承刚度,即当行星架是悬臂梁结构时,行星轮的支承可以利用双悬臂梁销轴和套筒联接的结构来降低支承刚度。Fox等[12]进一步扩展了Hicks[11]的方法,他们在销轴上加工了凹槽来进一步降低行星轮的支承刚度,然而这种设计的代价是提高了销轴的弯曲应力。后来Fox等[13]在论文中讨论了他们的设计,并用实验研究来证明他们的“弹性销”设计极大地改善了均载性能,尤其是当行星轮个数越多时效果越好。Montestruc[14]论证了这种设计,并且定量地分析了其优点。国内学者从事行星齿轮的均载特性的研究相对较晚,方宗德等[15]利用Fourier级数方法求解了2K−H型行星减速系统的运动微分方程,并计算了齿轮偏心误差对齿轮载荷均匀性的影响。肖铁英等[16]建立了NGW型行星齿轮结构的计算模型,并提出了当量啮合误差和等效啮合刚度的概念。袁茹等[17]定量地描述了不同支承刚度下功率在各行星轮间分配不均衡程度和啮合动载荷波动程度。陆俊华等[18]建立了2K−H型行星传动系统的计算模型,从静力学角度分析了系统的均载机理。叶福明等[19]建立了非等模数非等压力角NGW型行星齿轮系的静态均载特性的计算模型,得到一些理论研究结果。尽管国内外众多学者已经进行了大量的关于行星轮系均载特性的研究,然而到目前为止,几乎都是针对单排行星齿轮系,尚没有涉及双排行星轮系的建模和均载特性研究。为此,本文作者提出一个不考虑动态效应的关于双排行星轮系的计算模型,系统并定性地分析了包括行星轮偏心误差,支承刚度,内齿圈的支撑刚度以及一级行星架的扭转刚度等参数对系统静态均载特性的影响,并由此得出一些理论结果。
1 双排行星齿轮系统的建模
1.1 物理模型
双排行星齿轮系统由两排独立的行星轮系组成,并由第1级行星架1和第2级太阳轮2的输入轴联接在一起,两排行星轮系的连接部件(后文称为中间部件)具有一定的扭转刚度c1s2,以用来传递动力,如图1所示。第1级的太阳轮1可径向浮动,行星轮1i和2i由安装在行星架上的销轴和轴承来支承,其支承刚度分别为p1和p2。在一些典型的减速器结构中,内齿圈1和2为由长薄壁圆筒支撑,具有一定的支撑刚度r1和r2,以获得更好的均载特性。原动机的扭转D作用在1级太阳轮1上,外部负载L作用在2级行星架2的输出轴上。

图1 双排行星齿轮系统动力传动原理图
考虑到第1级和第2级行星轮系间的共同特性,故可利用第1级行星齿轮系统为例来说明双排行星齿轮系统的自由度,如图2所示。内齿圈存在弹性支撑,故认为具有2个平动自由度r1和r1,径向浮动的太阳轮具有3个自由度,包括转动自由度s1、水平方向位移自由度s1和垂直方向位移自由度s1。行星轮也具有3个自由度,包括绕安装销轴的转动自由度pi、沿着行星轮和太阳轮中心连线方向的位移自由度pi和与之垂直的位移自由度pi。行星架由于安装轴承对其在径向位移的限制,使得其只有一转动自由度c1。另外,尽管第2级行星轮系的太阳不具备径向浮动能力,但是同样具有3个自由度,即s2,s2和s2。基于以上分析,在第1级行星轮系有个行星轮和第2级行星轮系具有个行星轮的双排行星齿轮系统中,共存在12+3(+)个广义坐标,如下式所示。

式中:i=1,2,…,N;j=1,2,…,M。
1.2 几何关系
1.2.1 行星轮在啮合线上的等效偏心误差
为了便于研究,本文进行简化处理,假定所有齿轮为标准的渐开线直齿齿轮,不考虑变位系数的影响,忽略轴承的支承间隙和齿轮啮合副的齿侧间隙,同时认为行星架的安装和制造误差均包含在行星轮的偏心误差中[19]。图3显示了行星轮系中各齿轮的偏心误差在太阳轮和行星轮的啮合线(外啮合)以及行星轮和内齿圈的偏心误差在啮合线(内啮合)上的等效误差的几何关系。由图3(a)可以得到太阳轮和行星轮分别在外啮合线上的等效偏心误差并可以表示为

式中:=1,2,…,;和分别为太阳轮和行星轮在外啮合线上的等效偏心误差;为太阳轮相对行星架的转动频率且等于;为行星轮相对行星架的转动频率且等于;为太阳轮的转动频率;p和s分别为行星轮和太阳轮的齿数;和分别为太阳轮和行星轮偏心误差的初始相位角;为齿轮压力角。

(a) 太阳轮和行星轮的偏心误差在外啮合线上等效误差;(b) 行星轮和内齿圈的偏心误差在内啮合线上等效误差
另外根据图3(b)所描述的几何关系,可以得到行星轮和内齿圈的偏心误差在内啮合线上的等效误差和分别为

1.2.2 齿轮的平动在啮合线上的等效位移
由于太阳轮、行星轮和内齿圈存在平动位移,而此位移在一定程度上影响了啮合副间的弹性啮合力,故有必要将其分别投影到内外啮合线上获得其在啮合线上的等效位移,从而用于弹性啮合力的计算。同样地,取单排行星轮系为例来分析它们之间的几何关系,根据图4可以得到各齿轮在各自坐标系中的平动位移在相应啮合线上的等效位移如下:

(a) 太阳轮的平动在外啮合线上的等效位移;(b) 行星轮的平动在内外啮合线上的等效位移;(c) 行星轮的平动在内外啮合线上的等效位移
1.3 弹性啮合力
取单排行星轮系为例来计算轮系中内外各啮合副间的弹性啮合力,可由如下公式得到:

式中:=1,2,…,;spi和rpi分别为太阳轮和行星轮以及行星轮和内齿圈之间的弹性啮合力。spi()和rpi()分别为内外啮合线上的时变啮合刚度,可以用傅里叶级数来表示,为简化计算,此处只取一次基频谐波项。spi和rpi分别为内外啮合线上的相对位移,如下式所示:
式中:=1,2,…,;s1和pi分别为太阳轮和行星轮的基圆半径;spi()和rpi()分别为在外啮合和内啮合线上的时变综合误差;和为啮合副间的静态传递误差[20−21]的幅值;和分别为静态传递误差的初始相位;为内外啮合副的啮合齿频,并可以证明其等于。
1.4 系统载荷平衡方程
根据如上分析且在不考虑动态效应的情况下,可以推导出双排行星齿轮系统的静态载荷平衡方程,如下式所示:

式中:=1,2,…,;=1,2,…,;和分别为第1级和第2级行星轮系的行星轮的支承刚度;r1和r2分别为第1级和第2级轮系内齿圈的支撑刚度;为中间部件的扭转刚度;s2为第2级轮系中太阳轮的支承刚度;c1和c2分别为第1级和第2级的行星架的等效半径;s1和s2分别为第1级和第2级的太阳轮的基圆半径;和分别为第1级和第2级中第个和第个行星轮的基圆半径;和分别为第1级行星轮系中第个行星轮在内外啮合线上的弹性啮合力;和分别为第2级行星轮系中第个行星轮在内外啮合线上的弹性啮合力;D和L分别为系统的输入扭矩和负载扭矩,可通过系统的输入功率和输入转速求得。
2 双排行星轮系的静态均载特性的参数研究
为了从实际应用的角度来分析支承刚度和扭转刚度等系统参数对双排行星轮系的静态均载特性的影响,本文从一个真实的齿轮传动系统中提取出相关参数,如表1所示。另外由于输入和输出扭矩的波动取决于原动机和负载,很难消除和测量,因此本文忽略了它们的波动量。方程(6)的解可以通过傅里叶级数法[15]求得,该方法是将系统平衡方程的刚度矩阵、阻尼矩阵和解向量进行定常化,并略去二阶小量,最后利用利用线性叠加原理获得系统的解向量。

表1 双排行星齿轮系统的基本结构参数
将方程(6)的解向量代入式(4),可以得到各级轮系中行星轮在外啮合副间的啮合力和,结合两级行星轮系的输入扭矩1和2,可以得到各级轮系中单个行星轮的均载系数和为
式中:=1,2,…,;=1,2,…,。
最后可以通过下式分别得到第1级和第2级行星齿轮系统的静态均载系数[18−19]和:
式中:=1,2,…,;=1,2,…,。
2.1 行星轮的偏心误差对系统均载特性的影响
图5显示了当系统在一组确定的参数下,且相对阻尼比=0.03和输入转速=3 000 r/min,第1级和第2级行星轮的偏心误差在0~80 µm范围内单独变化时分别对第1级和第2级行星轮系均载系数的影响。从图5(a)可以看出:当第1级行星轮的偏心误差逐渐增加时,第1级轮系的均载系数近似线性地增加了近3%,而第2级轮系的均载系数几乎保持不变,说明第1级行星轮偏心误差对第2级轮系均载的影响可以忽略不计。另外,从图5(b)可以看出:随着第2级行星轮偏心误差的增长,第1级轮系的均载系数近似线性增长了3%,而第2级轮系的均载系数则非线性地增长了35%,这表明两级轮系之间由于第2级行星轮的偏心误差相关的耦合项产生了一定的耦合作用。比较图5(a)和5(b)可以看出:在双排行星轮系的传动系统中,第2级行星轮的偏心误差对系统的均载特性影响较大。同时可以判断出,与第1级行星轮偏心误差对其自身均载的影响相比,均载系数对第2级行星轮的偏心误差具有更高的灵敏度。

(a) 第1级行星轮偏心误差单独变化时第1级和第2级轮系的均载系数;(b) 第2级行星轮偏心误差单独变化时第1级和第2级轮系的均载系数
2.2 内齿圈的支撑刚度对系统均载特性的影响
根据现有关于2K−H型行星轮系的均载特性方面的文献来看,几乎所有的计算模型都将内齿圈完全固定,不考虑其支撑变形所带来的影响。然而在一些实际应用中,内齿圈由长薄壁圆柱体支撑,带有一定的弹性,这种设计被认为对系统的均载性能有一定的改进作用,尽管这种作用到目前为止还没有在理论和实验中证实过。为了在理论上验证这种弹性支撑齿圈的设计对改善均载性能的具体影响,本文通过一个实际算例来说明其作用。图6显示了系统在输入转速= 3 000 r/min和相对阻尼比=0.03的情况下,系统均载系数随着各级齿圈支撑刚度单独变化时的曲线。从 图6(a)可以看出:当第1级齿圈的支撑刚度从100 MN/m到1 000 MN/m逐渐增加时,第1级轮系的均载系数增加了2%左右,而第2级轮系的均载系数几乎没有变化。另外,从图6(b)可以看出:随着第2级齿圈的支撑刚度的增长,第1级轮系的均载系数同样几乎没有变化,而第2级轮系的均载系数则大幅增长了15%左右。以上实例分析从理论上证明了弹性支撑齿圈的设计的确可以优化行星轮系的均载性能。另外通过比较图5和图6,可以发现一个共同点,即第2级轮系的参数(包括行星轮的偏心误差和齿圈的支撑刚度)跟第一级轮系的参数相比,其对均载系能的影响更大,灵敏度也更高。经过初步研究,这可能是由于系统本身的结构参数所导致,如第1级和第2级行星轮的个数的不同,以及各级相对应的行星轮、太阳轮,内齿圈的齿数和模数的不同均可能导致该现象,最终结论还需要通过更多的计算实例来进行对比分析得到。
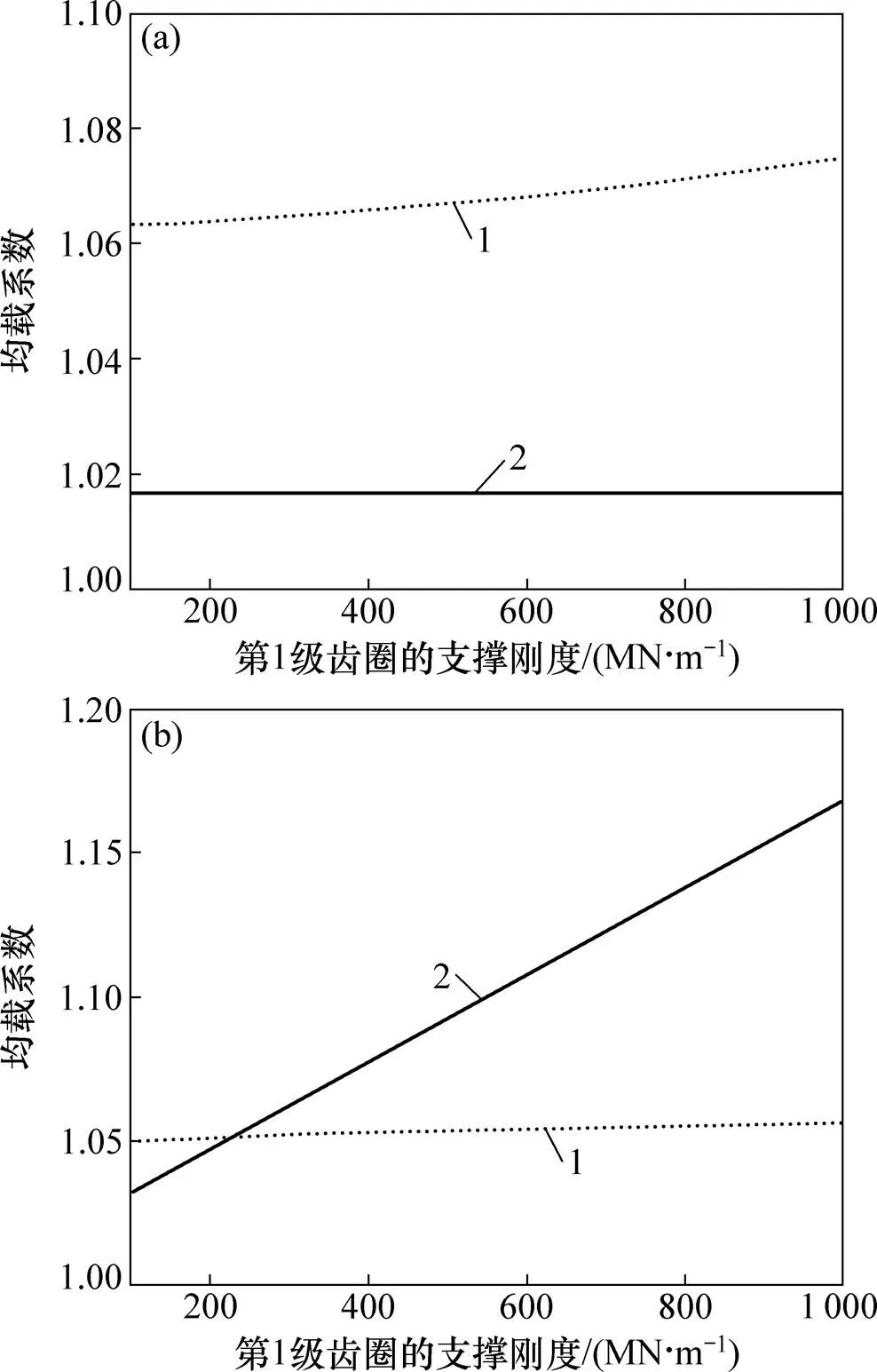
(a) 第1级内齿圈支撑刚度单独变化时第1级和第2级轮系的均载系数;(b) 第2级内齿圈支撑刚度单独变化时第1级和第2级轮系的均载系数
2.3 行星轮支承刚度对系统均载特性的影响
图7显示了系统在输入转速为3 000 r/min以及低阻尼=0.03工况下运行时,当第1级和第2级行星轮的支承刚度从100 MN/m到500 MN/m之间单独变化时系统各级轮系的均载系数的变化曲线。从图7(a)可知:随着第1级行星轮支撑刚度的增加,第1级轮系的均载系数近似线性地增加20%,而第2级轮系的均载系数几乎没有变化。但是从图7(b)可以看出:随着第2级行星轮的支承刚度的增长,第2级轮系的均载系数则呈现非线性的增长15%,且第1级轮系的均载系数也随之增长8%,这说明两级行星轮系之间由于第2级行星轮的支承刚度的影响而存在一定的耦合作用。从图7(a)和7(b)可以看出:各级行星轮的支承刚度对其所归属的行星轮系的均载性能都有着显著的影响。另外,尽管在一些具体参数未知的情况下,文中2.1和2.3节的计算和分析结果跟现有的关于单对行星轮系的均载特性的理论和实验研究具有较好的一致性[17, 22−25],同时这也证明了双排行星齿轮传动系统模型的正确性。需要注意的是,虽然从2.2节和2.3节的分析可知,降低内齿圈和行星轮的支承刚度有利于系统均载性能,然而过度提高均载性能将影响结构本身强度和寿命,这需要在设计的过程中综合考虑行星轮系的各项指标,国外已经有多个针对行星轮支承结构的文献来讨论如何改进设计来降低销轴的支承刚度以获得更优的均载性能[11−14]。
(a) 第1级行星轮支承刚度单独变化时第1级和第2级轮系的均载系数;(b) 第2级行星轮支承刚度单独变化时第1级和第2级轮系的均载系数
2.4 中间部件的扭转刚度对系统均载特性的影响
中间部件的扭转刚度对两级行星轮系的静态均载特性有着重要意义。如图8所示,系统在输入转速= 3 000 r/min,相对阻尼比=0.03的工况下,随着扭转刚度从20 MN∙m/rad增长到80 MN∙m/rad,第1级行星轮系的均载系数以缓慢的速度并单调地降低了1%左右,而第2级行星轮系的均载系数则单调地增长了8%。可以明显地看出中间部件的扭转刚度对第1级行星轮系的均载系数影响较弱,而对第2级行星轮系的均载系数影响较大。另外,由于两级行星轮系的均载系数的特性曲线具有不同的单调性(第1级轮系单调减小,第2级轮系单调增大),这意味着必有一平衡点存在,且通过多个算例证明该平衡点是普遍存在的,并不仅仅限于某一特殊的参数条件,这意味着在实际的双排行星齿轮系统的设计中,当考虑扭转刚度对各级轮系的均载特性的影响时,对该平衡点的分析和控制显得尤其重要。

1—第1级行星轮系;2—第2级行星轮系
3 结论
1) 建立了双排行星轮系传动系统的静力学均载计算模型,模型中考虑了时变啮合刚度、行星轮支承刚度、中间部件的扭转刚度和静态传递误差等参数,并针对该模型进行了静态均载特性的参数研究。
2) 第1级和第2级轮系中的行星轮偏心误差对系统的静态均载特性有较大影响,且两级行星轮系之间通过该参数存在一定的弹性耦合。
3) 从理论上证明了两级轮系中内齿圈的弹性支撑设计能够改善系统的均载性能,且通过降低第2级内齿圈的支撑刚度对改善静态均载性能的贡献更大。
4) 行星轮的支承刚度对系统静态均载特性有显著的影响,且第2级行星轮的支承刚度对其均载的影响更明显,其变化对均载系数也更敏感,同时两级轮系之间通过该参数存在较弱的耦合效应。
5) 中间部件的扭转刚度对第1级轮系的静态均载特性影响较小,而对第2级轮系的均载影响则较大。第1级和第2级轮系的静态均载特性曲线上的平衡点对双排行星齿轮的设计具有指导意义。
[1] Seager D L. Load sharing among planet gears[C]//SAE Paper. Warrendale: SAE International, 1970: 700178.
[2] Kahraman A. Load sharing characteristics of planetary transmission[J]. Mech Mach Theory, 1994, 29: 1151−1165.
[3] Kahraman A. Static load sharing characteristics of transmission planetary gear sets: Model and experiment[J]. SAE Trans, 1999, 108(6): 1954−1963.
[4] Bodas A, Kahraman A. Influence of carrier and gear manufacturing errors on the static planet load sharing behavior of planetary gear sets[J]. JSME Int J Ser C, 2004, 47(3): 908−915.
[5] Ligata H, Kahraman A, Sing A. An experimental study of the influence of manufacturing errors on planetary gear stresses and planet load sharing[J]. Journal of Mechanical Design, 2008, 130: 041701.
[6] Ligata H, Kahraman A, Singh A. A closed-form planet load sharing formulation for planetary gear sets using a translational analogy[J]. Journal of Mechanical Design, 2009, 131: 021007.
[7] Singh A. Load sharing behavior in epicyclic gears: Physical explanation and generalized formulation[J]. Mech Mach Theory, 2010, 45: 511−530.
[8] Gu X, Velex P. A lumped parameter model to analyze the dynamic load sharing in planetary gears with planet errors[J]. Appl Mech Mater, 2011, 86: 374−379.
[9] Montestruc A N. Influence of planet pin stiffness on load sharing in planetary gear trains[J]. Journal of Mechanical Design, 2011, 133: 014501.
[10] Boguski B, Kahraman A, Nishino T A. New method to measure planet load sharing and sun gear radial orbit of planetary gear sets[J]. Journal of Mechanical Design, 2012, 134: 071002.
[11] Hicks R J. Load equalizing means for planetary pinions: US, 3303713[P]. 1967.
[12] Fox G P, Jallat E. Epicyclic gear system: US, 6994651[P]. 2006.
[13] Fox G P, Jallat E. Use of the integrated flexpin bearing for improving of the performance of epicyclical gear systems[EB/OL]. [2008]. http://www.timken.com/enus/solutions/ energy/indenergy/Documents/FlexpinBearingPaper.pdf.
[14] Montestruc Aalfred N. A numerical approach to calculation of load sharing in planetary gear drives[J]. Journal of Mechanical Design, 2010, 132: 014503.
[15] 方宗德, 沈允文, 黄镇东. 2K-H行星减速器的动态特性[J]. 西北工业大学学报, 1990, 8(4): 361−371. FANG Zongde, SHEN Yunwen, HUANG Zhendong. Analysis of dynamic behaviour of 2k-h planetary gearing[J]. Journal of Northwestern Polytechnical University, 1990, 8(4): 361−371.
[16] 肖铁英, 袁盛治, 陆卫杰. 行星齿轮机构均载系数的计算方法[J]. 东北重型机械学院学报, 1992, 16(4): 290−295. XIAO Tieying, YUAN Shengzhi, LU Weijie. Calculative method of load balance coefficient in planetary gear[J]. Journal of Northeast Heavy Machinery Institute, 1992, 16(4): 290−295.
[17] 袁茹, 王三民, 沈允文. 行星齿轮传动的动率分流动态均衡优化设计[J]. 航空动力学报, 2000, 15(4): 410−418. YUAN Ru, WANG Sanmin, SHEN Yunwen. Dynamic optimum design of power shared out equally among the planetary gears[J]. Journal of Aerospace Power, 2000, 15(4): 410−418.
[18] 陆俊华, 李斌, 朱如鹏. 行星齿轮传动静力学均载分析[J]. 机械科学与技术, 2005, 24(6): 702−705. LU Junhua, LI Bin, ZHU Rupeng. Analysis of static load sharing in planetary gearing[J]. Mechanical Science and Technology, 2005, 24(6): 702−705.
[19] 叶福民, 朱如鹏, 鲍和云. 非等模数非等压力角NGW型行星齿轮系静力学均载行为[J]. 中南大学学报(自然科学版), 2011, 42(7): 1960−1966. YE Fumin, ZHU Rupeng, BAO Heyun. Static load sharing behavior in ngw planetary gear train with unequal modulus and pressure angles[J]. Journal of Central South University (Science and Technology), 2011, 42(7): 1960−1966.
[20] Houser D R. Gear noise state of the art[C]//Proceedings of Inter-Noise. Avignon, France, 1988: 601−606.
[21] Kahraman A, Singh A. Non-linear dynamics of a spur gear pair[J]. Journal of Sound and Vibration, 2009, 142(1): 49−75.
[22] Singh A, Kahraman A, Ligata H. Internal gear strains and load sharing in planeteary transmissions-model and experiments[J]. Journal of Mechanical Design, 2008, 130(7): 0726002.
[23] 孙智民, 沈允文, 李素有. 封闭行星齿轮传动系统的动态特性研究[J]. 机械工程学报, 2002, 38(2): 44−48. SUN Zhimin, SHEN Yunwen, LI Suyou. Study on dynamic behavior of encased differential gear train[J]. Chinse Journal of Mechanical Engineering. 2002, 38(2): 44−48.
[24] 鲍和云, 朱如鹏. 两级星型齿轮传动静力学系统基本浮动构件浮动量分析[J]. 中南大学学报(自然科学版), 2006, 37(3): 553−557. BAO Heyun, ZHU Rupeng. Floating displacement static analysis of basic floating part of 2-stages star gear train[J]. Journal of Central South University (Science and Technology), 2006, 37(3): 553−557.
[25] 陆俊华, 朱如鹏, 靳广虎. 行星传动动态特性分析[J]. 机械工程学报, 2009, 45(5): 85−90. LU Junhua, ZHU Rupeng, JIN Guanghu. Analysis of dynamic load sharing behavior in planetary gearing[J]. Journal of Mechanical Engineering, 2009, 45(5): 85−90.
Static load sharing behavior of double-row planetary gear train
SHENG Dongping, ZHU Rupeng, JIN Guanghu, LU Fengxia, BAO Heyun
(College of Mechanical and Electrical Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China)
A new model for analyzing the static load sharing characteristics of double-row planetary gear set was proposed, and planet’s eccentricity error, static transmission error, and time-varying meshing stiffness were taken into consideration. The equilibrium equations were determined by the method of Fourier series, and the behavior of static load sharing characteristics affected by the system parameters including gear eccentricity error, ring gear’s supporting stiffness, planet’s bearing stiffness and torsional stiffness of first stage carrier were investigated quantitatively. Theoretical analysis extends our current understanding of behavior of static load sharing characteristics, forms the basis of further theoretical and experimental research, and provides guidelines for the designing of the double-row planetary gear transmission system.
double-row planetary gear; static load sharing; supporting stiffness; eccentricity error; torsional stiffness
10.11817/j.issn.1672-7207.2015.10.012
TH132
A
1672−7207(2015)10−3637−09
2015−02−22;
2015−05−17
国家自然科学基金资助项目(51375226);高等学校博士学科点专项科研基金资助项目(20113218110017);江苏省高校优秀学科建设工程资助项目(PAPD);江苏省研究生创新基金资助项目(CXZZ11_0199);中央高校基本科研业务费专项资金资助项目(NZ2013303,NZ2014201)(Project (51375226) supported by the National Natural Science Foundation of China; Project (20113218110017) supported by the Doctoral Program Foundation of Institutions of Higher Education of China; Project (PAPD) supported by the Priority Academic Program Development of Jiangsu Higher Education Institutions, China; Project (CXZZ11_0199) supported by the Funding of Jiangsu Innovation Program for Graduate Education, China; Projects (NZ2013303, NZ2014201) supported by the Fundamental Research Funds for the Central)
朱如鹏,博士,教授,从事齿轮传动系统的动力学研究;E-mail:rpzhu@nuaa.edu.cn
(编辑 陈爱华)
猜你喜欢
制造技术与机床(2022年10期)2022-10-11
云南画报(2021年8期)2021-11-13
北京航空航天大学学报(2021年6期)2021-07-20
故事作文·高年级(2018年8期)2018-08-14
快乐语文(2018年7期)2018-05-25
制造技术与机床(2017年7期)2018-01-19
汽车实用技术(2017年15期)2017-09-15
小说月刊(2015年9期)2015-04-23
专用汽车(2015年1期)2015-03-01
人生十六七(2015年5期)2015-02-28
