
基于物联网的高危领域救援设备研究
2015-09-22 10:00沈雪微赵丹郝秀召毛文涛
物联网技术 2015年9期
沈雪微+赵丹+郝秀召+毛文涛


摘 要:以物联网与高危领域应用的结合作为研究点,通过调查和分析,将重心放在高危领域救援安全方向,并利用学科交叉融合和相互影响的特性,进行技术应用。文章基于WiFi和ZigBee的联合定位技术、传感器的环境感知技术、六轴重力加速度的行为识别技术等物联网新技术,并利用这些技术对高危领域的救援体系进行了完善,从而实现了智能化识别、定位、跟踪、监控和管理。
关键词:联合定位;行为识别;智慧救援;ELM
中图分类号:TP391.4 文献标识码:A 文章编号:2095-1302(2015)09-00-03
0 引 言
伴随经济建设的快速发展和工业化、城市化、市场化的快速推进,我国进入社会转型期和矛盾凸显期,公共安全形势严峻。全国因自然灾害、事故灾害和社会安全事件造成的非正常死亡超过20万人,经济损失6 500亿元左右。
可见,在高危领域中,一旦事故发生,不仅严重威胁着作业人员生命和国家财产的安全,而且会引起社会极大的震动,造成巨大而不可挽回的损失。所以,如何保障高危领域安全作业已成为一项重要的研究课题。
本文选择以物联网技术在消防以及煤矿作业的应用为研究方向,目的是完善高危领域方面的救援体系。希望通过此项研究来实现增强作业人员的救援能力、指挥部下达指令的精确即时,并提高重点保护单位现场救援的高效性、可靠性。
1 技术分析
首先以消防救援为研究切入点,利用基于WiFi和ZigBee的联合定位技术、基于传感器的环境感知技术、基于六轴重力加速度的行为识别技术等物联网新技术,将其与救援过程科学高效的结合,目的是研究高效救援、安全低损耗的智能救援应用体系。
1.1 基于WiFi和ZigBee的联合定位技术
在处理移动灭火救援等高危复杂场所的问题中,WiFi定位技术具有精度高、对网络变动适应性好的特点,但因其抗干扰能力较差,故而考虑到当前广泛应用的ZigBee定位技术作为互补。其节点可进行数据采集,有自组网功能,并具备能耗低、可靠性强等优点。二者结合,提供较好的定位效果,能够适应救援现场变化复杂的环境。
1.1.1 技术特性
通过信息融合技术,利用ZigBee技术组建无线传感器监测网络传输小数据量的监测活动信息,利用WiFi技术组建无线监测局域网络,传输大数据量的监测活动信息,同时可具备以下特性:
(1)实时性和准确性
该设计属于远程检测,通过接收终端信号,再根据WiFi和ZigBee采集的数据信息实现对救灾现场消防人员的精确定位。能够及时准确地反馈救援人员情况,并反馈指挥中心的决策指令。
(2)可靠性、抗干扰性
系统中的ZigBee模块与WiFi模块同时工作,具备较强的抗干扰能力以适应火场等各种复杂环境,保证系统连续可靠地运行。
(3)可扩展性
本设计能够实现多种技术的融合,能够将其迁移至其他场合,增强系统功能性。
1.1.2 技术方案
本方案主要包括数据传输、数据库构建与最佳定位三个方面,这三个方面主要实现两大功能,即预警和跟踪定位。
(1)数据传输
数据传输主要由WiFi无线网络和已有的以太网实现。现场情况复杂,有线网络将不再可靠。由以WiFi模块为依托的数据采集模块传递信息后,通过AP自组网传递到指挥中心,具有高速、及时、稳定、灵活、有效的特点。
(2)数据库构建
鉴于室外无线定位的特点,须提前对定位的地理环境进行信号强度样点采集,将采集的信号强度信息进行处理,建立标准数据库。在之后的具体定位中,只要将信号强度信息传输到服务器,比较标准数据库中的参考值,并利用极限学习机算法进行不断调整,得到最佳值,方可精确定位。
(3)最佳定位实现
通过WiFi和ZigBee定位技术的结合,利用ZigBee抗干扰性强的优点来弥补WiFi的不足。该模块分为两部分,一部分是后台服务器,利于指挥部人员进行现场监控,另一部分可以在终端上实现救援人员实时定位。
待定位区域内有很多固定的参考标签,将此标签的位置信息通过定位服务器送入数据库集中的标准数据库中,然后分别将WiFi和ZigBee单独工作时的定位信息经由定位服务器送到数据库集中的定位数据库。
其中定位数据库中的数据每隔一段时间就会将参考标签的位置信息更新一次,相应的分析处理部分就会对定位数据库与标准数据库中的数据进行分析对比,以便能够及时确定最优的定位方式,增强系统的抗干扰性。
在救援现场实时定位时,通过WiFi将人员携带的定位终端采集的信息实时发送到服务器,利用最佳定位选择方式对采集到的实时数据进行处理,获取人员所处的准确位置,以实现指挥中心对救援人员的准确指导。
1.2 基于传感器的环境感知技术
考虑到高危作业环境中非视觉性因素也会干扰救援人员行动或危及人身安全,身处如此环境无法感知外界,而远在现场之外的控制台则更加鞭长莫及。在上节所述方案中,我们考虑加入信息采集方面进行综合研究。
利用传感器,主要包括烟雾传感器、温湿度传感器和火焰传感器等。将带有传感器的标签加载在救援人员移动终端上,一旦救援人员进入火灾现场,传感器便开始采集数据,通过WiFi无线网络等过程传至控制中心。
此方面主要目的是采集其所处环境参数进行感知检测。将火灾现场情况的复杂性以数值等形式直观地向指挥官反馈,全方位掌控火灾情况,科学、合理地下达指令。
当环境参数达到其设置的阈值,会立即向现场救援人员及指挥中心同时发起警报,以便于双方进行合理的战略调整。
1.3 基于重力加速度的行为识别技术
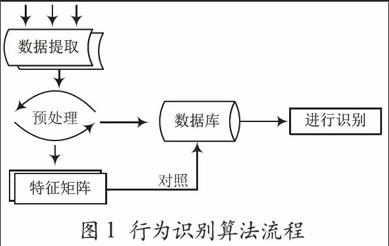
为更好保证救援人员的人身安全,需对火场内部救援人员的自身行为进行监测,一旦遇到摔倒等危急情况,及时传达给指挥部,请求配合救护。图1所示是其行为识别算法流程图。
1.3.1 技术概述
基于加速度的用户行为识别,其中主要包含信号采集、数据预处理、特征提取、行为识别四个部分。数据采集负责操作传感器部件,获取用户行为采样数据,例如加速度、陀螺仪或者生命体征。特征值提取主要负责根据采样数据获得行为的特征值,既包括统计性特征值,例如均值、方差、相关性和能量等,还包括结构性特征值,例如自回归模型系数等。
图1 行为识别算法流程
在数据预处理阶段,本设计预先利用的加速度传感器采集多组动作数据构建数据库,该数据库包括众多不同采集者的12类动作信息,此处选用静止、行走、奔跑三类数据作为原始加速度信号,为后续判断人员摔倒等状况的基础。同时,为了减少噪声对行为识别的影响,此处采用了FIR滤波器对加速度信号进行了滤波处理。这里讨论特征提取阶段,通过对近年来人体运动模式识别系统中使用的信号特征的统计分析发现,与传统的傅里叶变换相比,小波变换是时间和频率的局部变换,解决了许多傅里叶变换不能解决的问题。
另外,作为行为识别的关键支持,本文通过与传统神经网络算法比较,选择了根据极限学习机(ELM)算法对所采集到的现场实时数据进行网络训练。该方法随机给定神经元权值中的输入权值和阈值,然后通过正则化原则计算输出权值,神经网络依然能逼近任意连续系统。具有参数选择容易,学习速度快,具有良好的泛化能力。
1.3.2 技术实现
该方法的技术实现主要分为4步:
(1)接收数据采集节点发出的数据信号,传入上位机,方式在以上两种技术应用中已有体现;
(2)上位机程序对采集到的数据预处理并构建数据库。在原始加速度信号进行特征提取前需要对其进行预处理,通过平滑、去噪、归一化、加窗等方式处理。为了减少噪声对行为识别的影响,本文采用FIR滤波器对加速度信号进行了滤波处理;
(3)通过时域分析法、频域分析法和时频分析法对所得预处理数据进行特征提取。提取特征并处理为相对应的特征矩阵,作为数据源,以备后续使用;
(4) 将得到的数据与建立好的数据库进行对比,利用ELM算法训练数据,获取分类信息,实现人体行为识别功能。具体如图2和图3所示。
2 扩展救援范围应用方案
同样处于高危领域的煤矿行业同样也可以适用该方案,这对保障煤矿工人的安全是极其重要的。
将WiFi接入点AP,ZigBee节点和无线传感器可以固定在井下的巷道壁上。AP利用光纤与总控制器连接,总控制器将收到的数据进行打包整理后,通过以太网传送到地面监控计算机。
图2 人员定位详细显示窗 图3 环境感知
工人身上也带有定位终端和无线传感器。定位终端使工人在经过WiFi和ZigBee覆盖区域时,能够获取他们的位置并上传到地面控制中心。从数据库中读出该ZigBee节点的相关采集信息,还实现对人员信息的采集记录、分析处理,同时还能实现实时显示、历史数据存储报表、查询打印等功能,使管理人员能及时准确的查询各种信息,方便人员管理、考勤等,特别是当事故发生时,对人员的分布情况一目了然,为营救工作提供了便利。
3 实验仿真
将以上讨论研究作为实验的理论依据,在此进行模拟仿真对其实践性与应用价值做出评估。
首先,在定位方案中,可选取一段走廊当作模拟场所,尽量符合应用领域的环境条件,通过技术融合,通过将其采集到的信息与数据库中的参考值进行对比,并可采用多种算法确定最佳定位方案,如图4所示。
图 4 采用多种算法确定最佳定位方案
图2中,每一格代表50 cm×50 cm的矩形区域,为测试精确,以红色圆圈表示原始位置,蓝色表示实际仿真中所确定的位置坐标。可以看出两者十分接近,尽管并未完全重合,在不足一米的误差情况下,实际应用已可以达到定位目的,确定人员状况。其次,各类环境感知传感器的功能性仿真情况如图5所示。
在正常环境条件下,由传感器反映出当前场所中实时环境值指数,作为指挥及行动的参考。而由图6可看出,在设定好限制值后,若检测到的实时数据超出限制,则会提出相对应的警告,以便救援策略的调整。
图 5 环境感知传感器的功能性仿真情况
另外就是行为识别方面,我们仿真出最终结果并对其中各个步骤进行分析,如图6所示。
图6 时域特征矩阵及应用ELM后分类精度
通过加速度传感器提取原始数据后进行一系列处理,得到行为比例,并根据结果数据反馈是否有危险。
在行为识别过程中,首先进行滤波处理去除干扰影响,随后通过程序提取加工为各类特征矩阵,为了有比较的分析,提取了时域特征、FFT系数特征等。
4 结 论
本体系主要适用于高危领域的救援方面,解决了高危作业人员的安全问题。本文在现有技术的发展上,结合物联网定位识别、环境感知及行为识别等功能发展共同进行。本文对救援体系进行了描述,利用作业人员携带的便携式装置上的传感器节点反映现场信息,指挥台可直接获得第一手现场资料,制定救援策略。通过现场模拟、仿真实验,验证了系统实施的可行性、完整性,为将来推广研究提供了仿真经验和理论基础。阐明了一旦发生危险事故,指挥部能够精确即时地下达指令,并增强重点保护单位现场救援的高效性、科学性以及可靠性。
参考文献
[1]湛浩星,孙长嵩.ZigBee技术在煤矿井下救援系统中的应用[J].算机工程与应用,2006,43(24):181-18.
[2]金纯,罗凤.基于ZigBee的传感器网络在森林防火系统应用[J].林业技术开发,2006,20(6):77-79.
[3]马增炜,马锦儒,李亚敏.基于WiFi的智能温室监控系统设计[J].农机化研究,2011,33(2):154-160.
[4]毕兴权.灭火救援官兵牺牲情况分析与预防对策研究[C].中国消防协会科学技术年会论文集,2010:599-602.
[5]沈苏彬,毛燕琴,范曲立,等.物联网的体系结构与相关技术研究[J].南京邮电大学学报(自然科学版),2009,29(6):1-11.
