
H桥级联STATCOM直流侧电容电压平衡控制方法
2015-09-19 00:30杨荣峰于雁南徐殿国
电力自动化设备 2015年5期
徐 榕,于 泳,杨荣峰,于雁南,徐殿国
(哈尔滨工业大学 电气工程系,黑龙江 哈尔滨 150001)
0 引言
电力系统中越来越多地使用柔性交流输电系统(FACTS)对电能进行传输,它能够提高电力系统利用和传输电能的能力,同时使系统稳定、安全、可靠地运行。作为核心装置与核心技术之一的静止同步补偿器(STATCOM),以其损耗低、响应快、储能元件体积小和输出电流谐波含量低等优点,成为动态无功补偿装置发展的重要方向[1-4]。在几种比较成熟的拓扑结构中,H桥级联拓扑结构的STATCOM因其模块化结构、无需功率器件串联即可输出足够高的电压和输出多电平电压的特点,在高压大功率场合得到日益广泛的应用[5-8]。
然而,这种级联型结构STATCOM的各个H桥单元直流电容彼此之间相互独立,每个单元的并联损耗、开关损耗、驱动脉冲延时等又存在差异,会导致STATCOM直流侧电容电压出现不平衡的问题,进而导致各功率器件承受不同的电压,使装置输出电压的总谐波畸变率(THD)增加[9]。因此,实现直流侧母线电压平衡控制是H桥级联STATCOM研究的关键问题之一。
近年来,国内外学者针对H桥级联型STATCOM的直流电容电压平衡问题进行了深入的研究。在相间直流电压平衡控制方面,文献[10-11]提出利用电压波动部分引起的电流变化在生成的参考电压基础上进行相间电压平衡补偿,但未考虑三相电流间的耦合关系,限制了不平衡的调节范围和动态性能。文献[12]针对三角形结构系统,提出一种基于有功电压矢量叠加的直流电压平衡控制方法,通过注入零/负序电流实现三相之间直流电压平衡。文献[13]提出一种注入负序电流的方法实现相间电压平衡控制,但额外注入电网的负序电流会对电网造成污染。文献[14]针对星型结构系统,提出一种基于零序电压注入实现三相之间直流电压平衡的控制方法,但对于三相直流侧特性相差较大的系统调节能力较弱。此外,文献[15-16]还提出增加额外硬件电路和控制系统对相间直流电压进行平衡控制,这无疑增加了系统的成本和复杂性,降低了系统的可靠性。在相内直流电压平衡控制方面,文献[10]对各单元的参考电压进行PI调节,但在实现过程中需要使用大量的PI控制器,涉及到调节参数整定及延时问题。文献[17]通过调节各单元的移相角来实现平衡控制,但对于高压大容量的变流器,移相角的可调范围很小,少量的偏差都可能引起系统不稳定。文献[18]则通过外加电路对各单元的直流侧电容进行有功交换,增加了系统的体积和成本以及控制复杂度。文献[19]采取调整脉冲序列的方法,从能量的角度实现电容电压平衡,但容易出现某些单元动作过于频繁的情况,影响装置的使用寿命。
针对上述问题,本文在直流侧电容电压三级平衡控制策略的基础上,分别采用比例谐振(PR)控制、自抗扰控制和平移调制波的方法,实现全局平均直流电压控制、相间直流电压平衡控制以及相内直流电压平衡控制。实验结果表明,本文提出的控制方法具有良好的动态性能以及较强的鲁棒性,有效地解决了H桥级联STATCOM直流侧电容电压平衡控制的难题。
1 STATCOM的直流侧电压控制分析
1.1 STATCOM的系统模型与工作原理
H桥级联STATCOM的主电路拓扑结构见图1。STATCOM采用星型接法,通过连接电抗器并联于电网与负载之间,STATCOM通过注入与负载类型相反的无功电流,补偿负载的无功,提高电网输电质量,使电网只提供有功电流。每相桥臂由N个H桥逆变单元级联而成。设功率开关器件在理想状态下工作,usa、usb和 usc为网侧三相电压,isa、isb和 isc为网侧三相电流,ua、ub和 uc为 STATCOM 输出三相电压,ia、ib和 ic为 STATCOM 输出三相补偿电流,ila、ilb和ilc为负载三相电流,Udcreg为直流侧电容电压参考值,C为直流侧电容,L为连接电抗器,Rs为充电电阻。
不考虑功率单元损耗差异,为实现功率平衡,应该保证每一相各功率单元的工作时间一致。用导通时间的占空比表示工作时间,将开关管的状态定义为开关函数,形式如下:

由基尔霍夫电压、电流定律及能量关系可以得到STATCOM基于开关函数的数学模型为:
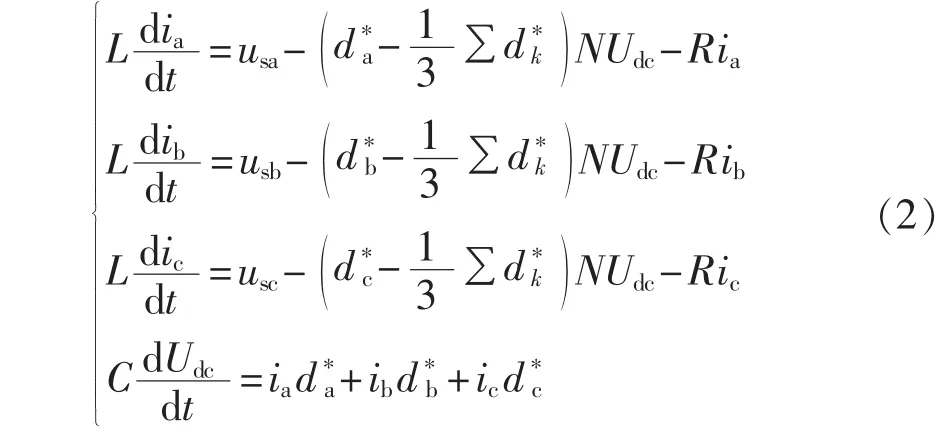
其中,R为系统的等效损耗电阻。
STATCOM工作时,直流侧电压Udc通过相应桥臂IGBT器件的导通与关断实现输出相间电压的控制,从而使得输出的补偿电流ia、ib和ic按照参考指令电流进行变化,以实现滤波与补偿无功的功能。因此直流侧电压Udc的稳定是保证STATCOM正常工作的关键环节之一,所以必须要对STATCOM直流侧电容电压进行平衡控制。
1.2 直流侧电容电压三级平衡控制策略
H桥级联STATCOM直流电压控制策略通常采用三级控制:第一级为全局平均直流电压平衡控制,控制三相所有功率单元的直流侧电容平均电压等于参考电压,解决系统整体直流侧电压的平衡控制问题;第二级为直流侧电容电压相间平衡控制,控制每相各功率单元直流侧电压平均值等于全局直流电压平均值,保证每相各单元直流侧电容总电压一致,解决各相之间直流侧电压的平衡控制问题;第三级为直流侧电容电压相内平衡控制,控制每个功率单元的直流侧电压等于该相平均直流电压,解决各功率单元之间直流侧电压的平衡控制问题[10]。
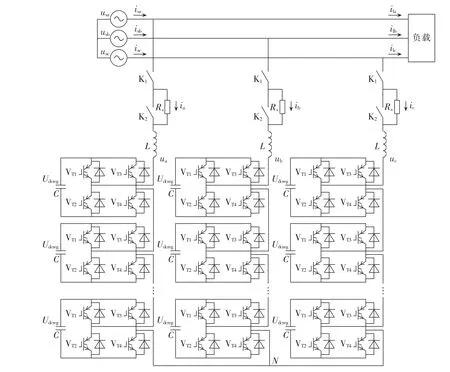
图1 H桥级联STATCOM的主电路拓扑Fig.1 Topology of H-bridge cascaded STATCOM
2 直流侧电容电压平衡控制新方法
2.1 全局平均直流电压平衡控制
作为直流侧电容电压三级平衡控制中的第一级控制,其目的是控制三相所有功率单元的直流侧电容平均电压等于参考电压,解决系统整体直流侧电压的平衡控制问题。通常的方法是采用传统的PI控制器实现[10],其实现比较简单。但由于STATCOM输出电压和电流为工频正弦变量,其输出的功率表现为2倍工频的正弦变量,这样会使实际的直流侧电容也具有2倍频的纹波电压,因此,直流侧电压控制环节产生的参考指令电流就不是一个标准的直流变量,也同样会含有2倍频的交变分量,从而影响STATCOM输出电流的质量。
一般情况下,在采用PI控制器时,为了保证系统稳定性和动态性能,电压环环宽一般都设为200~500 Hz,这样无法抑制100 Hz纹波电压对STATCOM输出电流的影响;而且其存在较大的静态误差,除使第一级控制效果不佳外,还会影响后2级的控制效果;特别在STATCOM启动的过程中,会使直流电压达到参考电压过程中存在较大的超调。
为解决该问题,本文采用PR控制器对全局平均直流电压进行控制,由于其在基波频率处增益无穷大,而在非基频处增益很小,系统在基波频率处可实现零稳态误差,通过适当地设置PR控制器谐振点和截止频率,能够减小纹波电压在误差中的比重,减小纹波电压造成的参考电流的畸变,进而提高STATCOM输出电流的质量,同时提高系统的动态性能及系统的动态调节速度,特别是在STATCOM启动过程中,有效地抑制直流侧电压的超调现象。
PR控制器由比例调节器和谐振调节器组成。其传递函数如式(3)所示:

其中,kp为比例增益系数;kr为积分增益系数;ωc为截止频率;ω0为谐振频率。其中kr只影响谐振控制器的增益,而不影响谐振控制器的带宽,随着kr的增大,谐振频率处幅值也增大,它是起消除稳态误差的作用;ωc不仅影响PR控制器的增益,还影响PR控制器的带宽,随着ωc的增加,控制器的增益和带宽都增大。
本文选取 kp=0.05、kr=10、ωc=3.14rad/s、ω0=100π为控制器参数。图2为该参数下的PR控制器的Bode图。图3为PR控制器框图,将直流侧电容平均电压和参考电压比较,得到的电压偏差信号经过PR控制器,控制器输出信号交给电流内环处理。其中,Udcreg为直流侧电容电压参考值为全局直流电压平均值为全局平均直流电压平衡控制的有功调节控制电流。

图2 PR控制器的Bode图Fig.2 Bode plots of PR controller

图3 PR控制器框图Fig.3 Block diagram of PR controller
2.2 相间直流电压平衡控制
为实现控制每相各功率单元直流侧电压平均值等于全局直流电压平均值,保证每相各单元直流侧电容总电压一致,本文采用自抗扰控制器(ADRC)对各相之间直流侧电压进行平衡控制。
ADRC控制源于PI控制的思想,但相对于PI控制,取得了更好的控制效果。此外,通常情况下,PI控制器对参数非常敏感,参数的微小变化都会对PI控制器的控制效果产生很大的影响,所以控制器选取合适的参数十分困难。相反地,使用ADRC时,由于保证控制器稳定工作的参数范围较宽,所以参数选取变得十分简单。同时,对比目前已有的方法,实现起来也非常简单,非常适合实际工程应用。ADRC在STATCOM中的成功应用,也为在后续的研究工作中出现传统方法无法解决的问题时,提供了一个新的解决思路。
下面介绍ADRC的设计步骤。
a.首先由式(2)可知系统为一阶系统,故设计一阶ADRC。将STATCOM每相直流侧电压作为被控制对象进行分析,建立直流侧电容电压相间平衡控制模型,并确定被控对象的输入输出量及控制量。
b.通过ADRC中的微分跟踪器(TD)对被控对象的参考输入安排过渡过程,并提取其微分信号。

其中,v1为参考值的跟踪信号;r1为速度跟踪因子,是反映微分跟踪器变化规律的特征参数,其值越大则跟踪速度越快,但同时会增加超调量,所以要根据实际系统运行时的要求适当选取;α1和δ1为可调控制参数,α1决定非线性形状,适当选择α1将极大改变控制效果,而δ1则决定了函数fal(·)线性区间的大小。
c.通过ADRC中的扩张状态观测器(ESO)对影响STATCOM直流侧电容电压相间不平衡的不确定因素和外部干扰进行动态的观测与估计。
对STATCOM直流侧电压设计二阶线性扩张状态观测器,表达式为:

其中,Ukdc(k=a,b,c)为系统当前周期每相各功率单元直流侧电压平均值的实时检测量,是已知参数;z1为直流侧电压的状态估计值;ξ为系统控制偏差;z2为被控对象的内扰及外扰作用的估计信号,即总的干扰量信号;Δik为控制量;b为控制量的反馈系数;r21、r22、α2和 δ2为可调控制参数,r22会影响系统扰动估计的滞后,其值越大滞后越小,但过大会使系统振荡,稍增大r21可以起到抑制该振荡的作用,但是r21过大会使系统发散,因此,在调整这2个参数时要相互协调,可首先调整r22,再逐渐增大r21来不断改善控制效果。
STATCOM直流侧电压检测环节存在误差,而z1对实际直流侧电压起到准确状态估计的作用,可以大幅提高直流侧电压控制的精度;针对不同应用场合运行参数的变化,z2对未知扰动进行准确估计,可以优化STATCOM相间直流电压控制的动态响应速度并提高系统的控制精度。扩张状态观测器对扰动估计的准确与否直接影响ADRC的控制效果,所以扩张状态观测器的参数整定非常关键。
d.通过ADRC中的非线性状态误差反馈控制律(NLSEF)来计算每相控制STATCOM直流侧电容电压相间平衡的有功调节控制量。
由于传统的ADRC中所采用的NLSEF在实际应用当中的参数很难选取,所以本文采用线性优化的方法对其进行简化处理,其线性表达式为:

其中,ξ1为微分跟踪器产生的跟踪信号v1与扩张状态观测器给出的状态估计信号z1之间的误差值;i0为无扰动反馈补偿的控制量;b为控制量的反馈系数,它和控制量Δik及扩张状态观测器的状态变量有关,选取b时,如果对象出现延迟,取较大的b值将产生一个大的误差控制信号,使输出响应加快,同时可以有效地补偿内外扰动;r3、α3和δ3为可调控制参数,可适当调节r3来控制调节速度,但速度过快会引起超调量加大和系统振荡,所以要适当地选取。
e.最后通过线性状态误差反馈单元结合扩张状态观测器对扰动部分的观测,得到本文所设计的相间直流电压平衡控制系统,如图4所示。

图4 ADRC框图Fig.4 Block diagram of ADRC
2.3 相内直流电压平衡控制
为控制每个功率单元的直流侧电压等于该相平均直流电压,实现相内直流侧电容电压平衡控制,本文在载波相移调制策略(CPS-PWM)基础上,根据直流侧电容瞬时充放电的情况,判断某一时刻单元的占空比调整方向和大小,通过上下平移每个功率单元的调制波,最终实现相内直流电压平衡控制,该方法配合载波相移调制策略,非常易于FPGA数字实现。
假设在某一时刻,电流方向为从电网流向变流器,若单元n的输出电压为正,意味着VT1、VT4开通,电流沿着图5(a)所示方向流向直流侧,给电容充电;同样地,若单元n的输出电压为负,意味着VT2、VT3开通,电流沿图5(b)所示方向流向直流侧,电容放电。容易看出,为了使各单元电容电压值趋于一致,对应正在充电过程中的几个功率单元,应延长电压较低单元的导通时间,并减少电压较高单元的导通时间;对正在放电过程中的功率单元的处理则相反。

图5 功率单元的充放电过程Fig.5 Charging and discharging processes of power unit
依照上述判断方法得出的结果,假设当前需要减小单元充放电时间,以调制波大于零的前半周期来分析,该单元应输出1和0电平,在0电平时该单元电容并没有接入主电路,既不充电也不放电。如果要减小单元充电时间,则需要减小1电平作用时间,那么可以减少开关管VT1和VT4的导通时间;又因为左桥臂此时是由正相调制波(>0)和正的三角载波比较决定,而右桥臂由反相调制波和负的三角载波比较决定,因此只要以0轴为界,如式(7)所示下移正半轴的调制波,并如式(8)所示上移负半轴的调制波,就可达到减小占空比的效果。

其中,eUdc=Unadc-Uadc,为直流侧电容电压误差;ui0为平移前的调制波;ui为平移后的调制波;k为调节系数。
调制波平移前后的效果对比如图6所示。
上述原理也适用于要求延长单元充放电时间的情形。概括二者,可以将占空比调整的调制波平移方法总结如下:如果调整指令为减小占空比,那么下移正极性调制波、上移负极性调制波;如果调整指令为增大占空比,那么上移正极性调制波、下移负极性调制波;上下平移的幅值以该单元直流侧电压值与平均值之差的大小决定。
结合电容瞬时充放电的情况,可以得到基于调制波平移的相内直流侧电容电压平衡控制算法的流程图如图7所示。
3 实验验证
3.1 实验装置
为了验证新方法的正确性与有效性,本文搭建电压等级为10 kV、额定容量为2 MV·A的H桥级联STATCOM实验平台。具体实验参数如下:网侧电压10 kV,电网频率50 Hz,开关频率1 kHz,每相H 桥单元数 N=12,电感 L=10 mH,直流侧电容C=5600μF,直流侧电压参考值Udcreg=800 V。
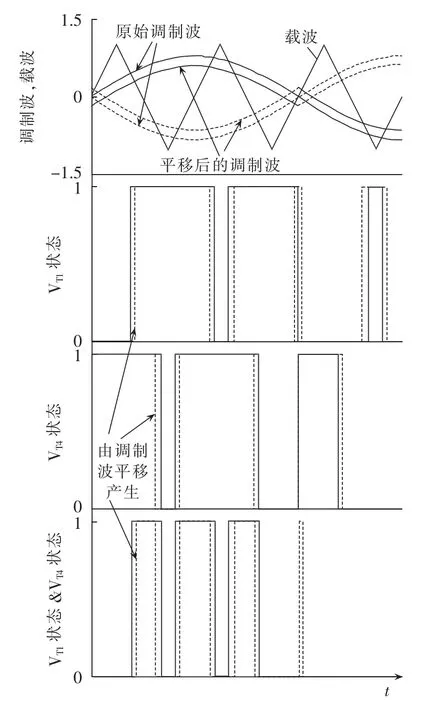
图6 调制波平移过程Fig.6 Process of modulation wave translation

图7 调制波平移流程图Fig.7 Flowchart of modulation wave translation
实验装置中核心的控制器部分采用双处理器设计,其中DSP芯片选择TI公司的TMS320F28335,主要负责无功电流检测及参考电流和参考指令电压的计算,并将参考指令电压发送给FPGA;FPGA芯片选择 Altera公司的CycloneⅢ系列的EP3C25,负责接收DSP发送的参考指令电压,产生36路PWM控制信号,并通过光纤将脉冲触发信号送到每个H桥单元。
本文提出的直流电容电压平衡控制策略中全局平均直流电压平衡控制和相间直流电压平衡控制在DSP中完成;相内直流电压平衡控制则在FPGA中完成,配合本文使用的载波相移调制策略,使其非常易于FPGA数字实现。
3.2 电压平衡控制实验过程
基于以上实验参数,对H桥级联STATCOM实验装置的启动过程及阶跃响应动态过程进行实验研究,实验过程中的装置动作时序如下:
a.在实验装置未启动时刻,各功率单元的IGBT封锁,STATCOM与电网侧连接的断路器和旁路充电电阻的断路器均处于断开状态;
b.闭合所有的断路器,使STATCOM通过交流电抗器和充电电阻,向各功率单元直流侧电容充电;
c.充电接近完成时,闭合旁路充电电阻的断路器,使STATCOM通过交流电抗器直接与电网相连;
d.STATCOM开始启动,装置直流电压控制策略按照时序自动依次启动,最终实现装置相间直流电压的平衡控制;
e.装置由输出一半额定电流阶跃为输出额定电流,待装置相间直流电压再次达到平衡时,实验结束。
在实验过程中,直流侧电压相关数据经过信号采集系统送入控制板的DSP中,在电脑上通过CCS软件可以观察并记录实验数据,最后将CCS记录的实验数据导出,通过MATLAB软件绘制成实验结果波形。
3.3 电压平衡控制实验结果分析
为验证本文提出的控制策略对全局平均直流电压平衡控制的效果,一级控制中选取增益kp=0.05、kr=10的PR控制器,并选取增益kp=0.5、ki=0.01的PI控制器进行对比研究。
图8为启动过程中分别采用PI和PR控制器作为一级控制器时的全局平均直流电压波形。从图中可以看出,采用PR控制器后,全局平均直流电压平稳上升,很快就可以达到平稳状态,并维持在直流电压参考值,基本不存在偏差;而PI控制下,虽然直流电压调节速度很快,但全局平均直流电压在达到平稳状态之前存在波动,波动的最大值幅值约为50 V(参考值的6.25%),之后才能逐渐趋于平稳,达到直流电压参考值。

图8 PR和PI控制下的STATCOM启动过程的全局平均直流电压波形Fig.8 Waveform of global average DC voltage during STATCOM startup under PI and PR control
在一级控制采用PR控制的基础上,二级控制采用ADRC控制。图9和图10分别为STATCOM启动时刻相间平均直流电压波形和STATCOM输出电流阶跃时刻的相间平均直流电压波形。其中,微分跟踪器控制参数 r1=0.3、α1=0.75、δ1=0.001;扩张状态观测器控制参数 r21=0.3、r22=18.05、α2=0.5、δ2=0.001、b=1;NLSEF 控制参数 r3=0.5、α3=0.25、δ3=0.001。

图9 STATCOM启动过程的相间平均直流电压波形Fig.9 Waveform of average inter-phase DC voltage during STATCOM startup

图10 STATCOM输出电流阶跃过程的相间平均直流电压波形Fig.10 Waveform of average inter-phase DC voltage during step change of STATCOM output current
由图9可以看出,尽管各单元的损耗不同,在相间直流电压平衡控制启动后,各相平均直流电压很快就与全局平均直流电压达到一致,直流电压偏差最大不超过10 V(额定值的1.25%);在达到平稳状态后,各相平均直流电压与全局平均直流电压基本不存在偏差,稳态误差小于5 V(额定值的0.625%)。
如图10所示,在STATCOM输出无功电流阶跃响应的瞬间,相间平均直流电压波动的最大值幅值不大于15 V(额定值的1.875%)。随后在平衡控制算法的作用下,相间平均直流电压仍能恢复到无差调节状态,稳态误差仍小于5 V(额定值的0.625%)。由此可以看出,相间直流电压平衡控制可以抑制各相平均直流电压不平衡,防止直流电容侧出现过压保护,致使装置停止运行。
在一级控制采用PR控制、二级控制采用ADRC控制的基础上,三级控制采用上下平移调制波的控制策略。其中,调节系数k=10。
图11为STATCOM在平稳运行过程中的a相各功率单元直流侧电容电压波形。从图中可以看出,所有单元的电容电压都很好地平衡在了800 V,且纹波含量很低。这也证明了载波相移调制策略搭配本文提出的基于调制波平移的相内电容电压平衡控制策略的性能和效果均令人满意。
通过上述启动过程、阶跃响应动态过程及平稳运行过程的实验研究,基于本文所提出的控制算法能够使各级控制相互协调,并达到最佳的控制效果,提高了装置的抗扰动能力。

图11 平稳运行过程的a相各功率单元直流电压波形Fig.11 DC voltage of phase-a power units during smooth operation
4 结论
本文在基于直流侧电容电压三级平衡控制策略的基础上,采用PR控制器对全局平均直流电压进行控制,提高了后2级的控制效果;采用ADRC对相间直流电压进行平衡控制,实现了对外界扰动的动态补偿;采用上下平移每个功率单元调制波的方法,实现了良好的相内直流电压平衡控制效果,而且该方法配合载波相移调制策略,非常易于FPGA数字实现。实验结果表明,本文提出的控制方法,具有良好的动态性能和较强的鲁棒性,能够很好地平衡H桥级联STATCOM的直流侧电容电压。
猜你喜欢
宁夏电力(2022年1期)2022-04-29
股市动态分析(2018年49期)2018-12-26
电子制作(2018年19期)2018-11-14
通信电源技术(2018年3期)2018-06-26
电子制作(2017年7期)2017-06-05
——重读陆俨少《崖海松涛》
中国画画刊(2017年4期)2017-05-16
电子制作(2017年19期)2017-02-02
海峡科技与产业(2016年3期)2016-05-17
电测与仪表(2016年10期)2016-04-12
电测与仪表(2015年10期)2015-04-09
