基于高速摄影和微惯性姿态测量的人-枪运动特性测试研究
2015-09-18 03:39宫鹏涵周克栋康小勇赫雷南京理工大学机械工程学院江苏南京0094军械工程学院一系河北石家庄050003
兵工学报 2015年12期
宫鹏涵,周克栋,康小勇,赫雷(.南京理工大学机械工程学院,江苏南京0094;.军械工程学院一系,河北石家庄050003)
基于高速摄影和微惯性姿态测量的人-枪运动特性测试研究
宫鹏涵1,2,周克栋1,康小勇2,赫雷1
(1.南京理工大学机械工程学院,江苏南京210094;2.军械工程学院一系,河北石家庄050003)
自动武器射击时的人-枪运动特性是武器人机工效评价和人-枪系统动力学建模的重要依据。为了获得某无托型自动步枪射击时的人-枪运动特性以及定量对人-枪运动参数作出估计,探索了高速摄影与MTI惯性运动测量相结合测量人-枪运动特性的新方法。采用高速摄影机从侧面获得人-枪系统运动特征点的运动信息,经过相关处理获得射击过程中步枪前后及俯仰的运动特征,同时运用MTI惯性测量系统测得步枪枪管轴线三维角运动参数。结合射击时自动机的实际运动情况,通过对高速摄影与惯性姿态测得的俯仰角运动结果进行对比与分析,验证了高速摄影与MTI惯性运动测量结果的可信性。研究结果表明,两种方法相互补充能更全面地反映人-枪运动特性,为人-枪运动参数的获取提供了新的测试手段。
兵器科学与技术;人-枪系统;运动参数;高速摄影;惯性运动测量
0 引言
自动步枪抵肩射击过程中的运动是既有转动又有后坐平动的多自由度空间运动。由于火药燃气的冲击和枪械活动机件间的碰撞使枪口偏离初始的瞄准位置,并且人体在射击过程中受枪械后坐力的冲击及射手对枪械的反作用力也会使枪产生运动响应[1],因此,要深入了解射击时人-枪系统的动力学过程及其运动规律,准确测量射击时,人、枪水平后坐、水平侧偏和垂直俯仰等运动特性参数是十分重要的。
根据测量原理的不同,人-枪运动的测量主要可分为光学非接触式测量和接触式传感器测量[2]两种途径。光学非接触式测量没有电缆线或其他附加设备对运动造成的束缚,测得的位移值具有较高的可信性,但要全方位获得人-枪运动特性需要多台高速摄影机,其设备昂贵且测定距离有限[3];接触式传感器测量可以克服设置固定参考系的困难,直接测量刚体的多自由度转动,但传感器附加的质量太大对测量结果会有一定的影响。近年来,随着微机电系统(MEMS)技术的发展,基于MEMS的微惯性测量系统,已广泛应用于航空航天、生物医学、军事等领域。本文在综合考虑各种测量方法优缺点的基础上,提出了高速摄影与MTI惯性运动测量相结合的人-枪运动特性测试方案,即用高速摄影从侧面测出人-枪系统运动位移参数;用MTI惯性运动测量方法测出步枪的角位移、角速度参数。
1 测试系统的构建
运用高速摄影可以直接测量人-枪系统的运动位移,原则上可以由此推导出人-枪系统整体运动的各种位移、速度和加速度,但由经微分处理的位移值得到的速度与加速度对干扰十分敏感,往往有严重误差。因此,为了准确获取某无托型自动步枪射击时的人、枪运动参数,构建MTI和高速摄影相结合的人-枪运动参数测试系统如图1所示。测试系统主要由高速摄影测试系统和MTI惯性运动测量系统两部分组成。
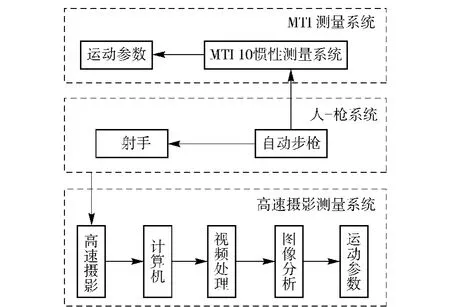
图1 人-枪运动参数测试系统Fig.1 Measurement system for human-riflemotion parameters
高速摄影系统选用美国Phantom V641型高速摄影机和运动图像处理软件ProAnalyst.Phantom V641型高速摄影机采用先进的传感器技术,分辨率高、曝光时间短,最大帧率可达140 000帧/s,能够满足人-枪动态特性实验运动变化剧烈的特点,细致捕捉人、枪运动的具体特征;ProAnalyst软件是一个全向性自动跟踪和数据分析软件,能够对任何高速影像迅速提取和跟踪物体的位置、速度等参数。本文通过该软件提取人-枪系统特征点的运动信息,进而获得人、枪运动的相关参数。
惯性运动测量系统选用荷兰XSENS公司生产的基于MEMS的MTI10姿态测量系统,其由微惯性测量组合系统和三轴磁强计组成,能同时提供经过校准的三维加速度、角速度及磁场速度。该系统具有体积小、质量轻、成本低、可靠性高、能够承受恶劣的气候环境和机械环境等优点[4]。MTI 10姿态测量系统外形如图2所示。

图2 MTI10惯性测量系统Fig.2 MTI10 inertialmeasurement system
2 测试方案与方法
根据自动步枪射击的实际情况及以往人-枪动态特性高速摄影研究[1-2],自动步枪射击过程中人体肩部有明显的后坐运动,上身相对于臀部有明显的俯仰运动,步枪相对于人体也存在少许的俯仰及侧偏运动。为了保证所选特征点能准确地反映人、枪俯仰的运动特征,根据人体主要关节的分布情况,在步枪和人体上分别布置了点①、点②、点③、点④四个特征点,如图3所示。其中:点①、点②为步枪上的点,点③、点④为人体上的点。拟通过步枪和人体上特征点的位移变化分别获得枪身和人体右肩的后坐运动参数;通过计算步枪上点①、点②连线和人体上点③、点④连线斜率的变化,获得步枪和人体上身在射击过程中的俯仰变化。此外,由于该自动步枪完成一次射击循环时间约0.09 s,为保证高速摄影能细致地从捕获特征点的运动情况,设置高速摄影机拍摄速度为4 800帧/s,每幅时间间隔0.21ms,分辨率为1 280像素×800像素,从人体右侧获取点①、点②、点③、点④位置变化,采集触发前1 000ms、触发后4 000ms的所有视频数据。
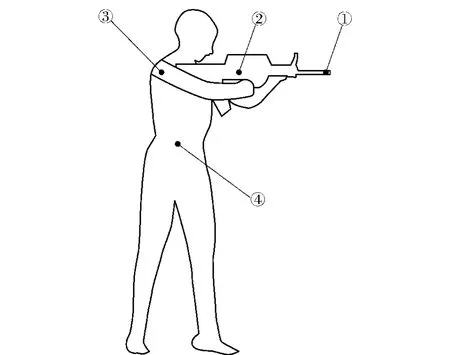
图3 人-枪系统特征点布置示意图Fig.3 Feature points arrangement of human-rifle system
将MTI 10惯性姿态测量系统固定在自动步枪下护盖的左侧,并使其X轴与枪管轴线保持一致,实验时,射手手持该自动步枪立姿抵肩射击,如图4所示。

图4 人-枪运动参数测试现场Fig.4 Measurement site for human-riflemotion parameters
2.1基于高速摄影的人、枪运动参数获取
将高速摄影所获得的视频文件导入ProAnalyst软件,设定视频采集频率和图像文件比例尺,选定图像跟踪区域及跟踪目标点进行自动跟踪,便可获得人、枪运动的有关参数。为了获取枪身及人体的俯仰运动参数,分别作枪身点①、点②及人体上点③、点④间的连线,求出两条直线的斜角。射击过程中斜角的变化即为枪身及人体上身的俯仰角位移。
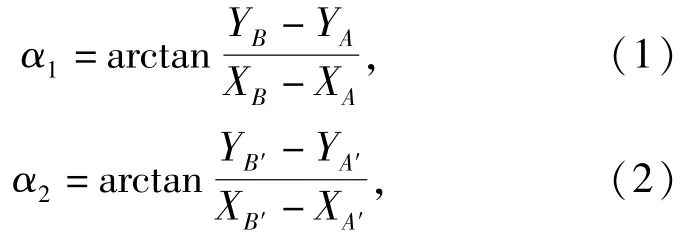
式中:α1、α2分别为俯仰运动前、后的直线斜角;XA、XB和XA′、XB′分别为运动前和运动后在X轴上的位移;YA、YB和YA′、YB′分别为运动前和运动后在Y轴上的位移。
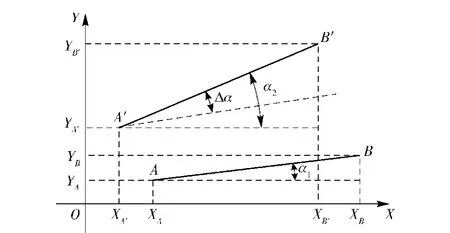
图5 俯仰角计算示意图Fig.5 Schematic diagram of pitching angle calculation
人-枪系统的俯仰角位移
2.2基于M TI人-枪角运动测量输出的数学描述
人-枪系统运动测量的姿态角主要包括枪身的俯仰角和侧偏角。MTI通过计算传感器坐标系和当地的笛卡尔右手坐标系之间的3个夹角得出三维姿态[5-6],系统坐标系如图6所示。姿态方位的输出可用不同的参数表示,如四元数、欧拉角、旋转矩阵等。由于四元数法凭借其计算量较小、能克服奇异性缺陷等优点被广泛运用,因此本文选用四元数的输出模式。

图6 传感器坐标系和地球磁场坐标系Fig.6 Sensor co-ordinate and fixed earth co-ordinate
四元数是由1个实数单位1和3个虚数单位i、j、k组成的含有4个元的数[7],其形式为

式中:q0为标量;q为矢量。
四元数与角速度ωb之间的关系式为

式中:ωbX、ωbY、ωbZ分别为姿态角速度在X轴、Y轴、Z轴上的分量;对该微分方程求解,便可实时获得四元数的4个元:
式中:四元数q(t)、ωb(t)为t时刻的值;T为采样周期。根据已知条件,可计算求得t+T时刻的四元数q(t+T).将求解出来的四元数的4个元代入用四元数表示的姿态变换矩阵

再根据四元数与方向余弦之间的关系,求解出姿态矩阵

将以上3个值求反正弦和反正切就可得到人-枪系统姿态参数,包括枪身的俯仰角和侧偏角信息。
3 实验结果分析
在人-枪运动特性测试中,由一名射手先后进行了数百发子弹射击实验,整个测试系统工作稳定、可靠、重复性好。尽管同一射手获得的具体数值上会有所差异,但总体规律相同,波形相似性良好,并且与以往经验吻合。其中1组3发点射时的人-枪运动轨迹如图7~图15所示。
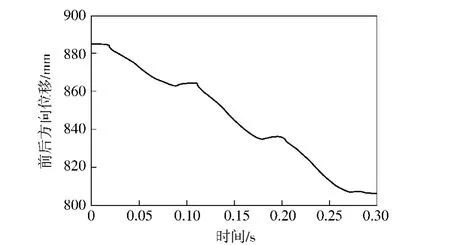
图7 枪身前后位移曲线Fig.7 Forward and backward displacement of rifle
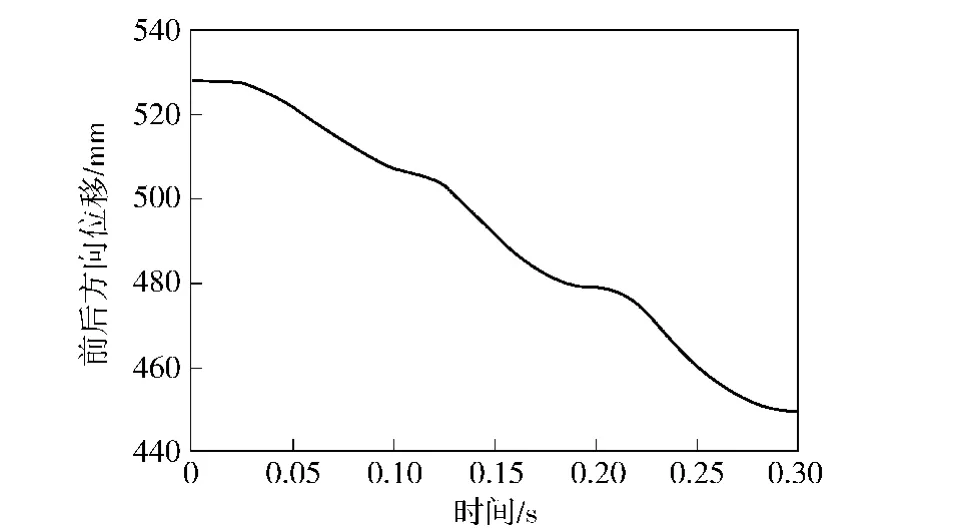
图8 右肩前后位移曲线Fig.8 Forward and backward displacement of right shoulder
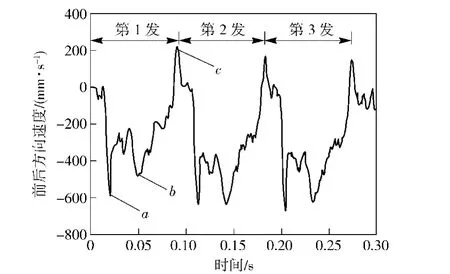
图9 枪身前后速度曲线Fig.9 Forward and backward velocity curves of rifle
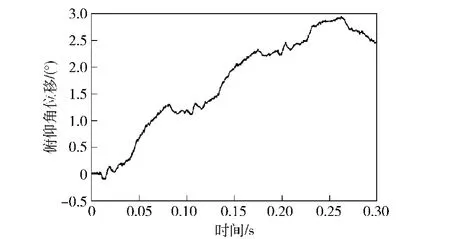
图10 枪身俯仰角位移曲线Fig.10 Pitching angular displacement of rifle

图11 人体上身俯仰角位移曲线Fig.11 Pitching angular displacement of human upper body

图12 枪身俯仰角位移曲线Fig.12 Pitching angular displacement of rifle
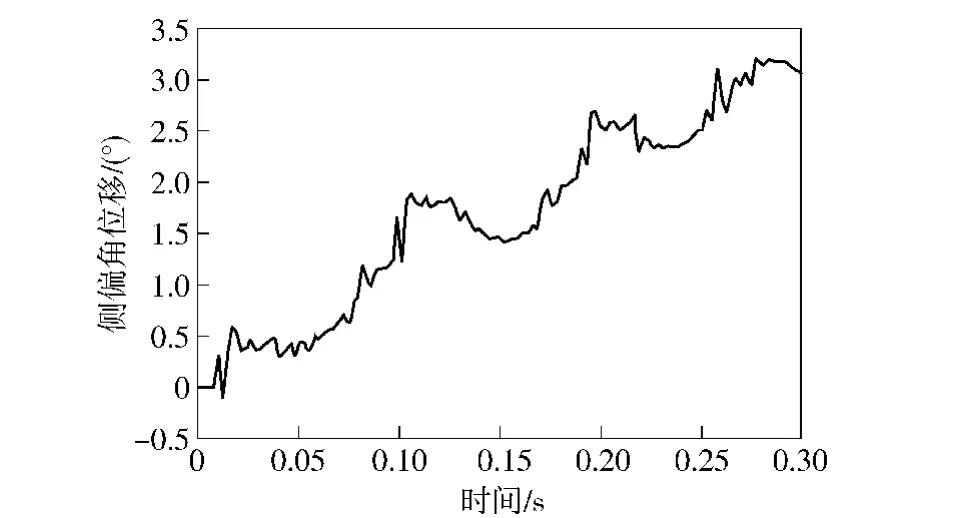
图13 枪身侧偏角位移曲线Fig.13 Yawing angular displacement of rifle
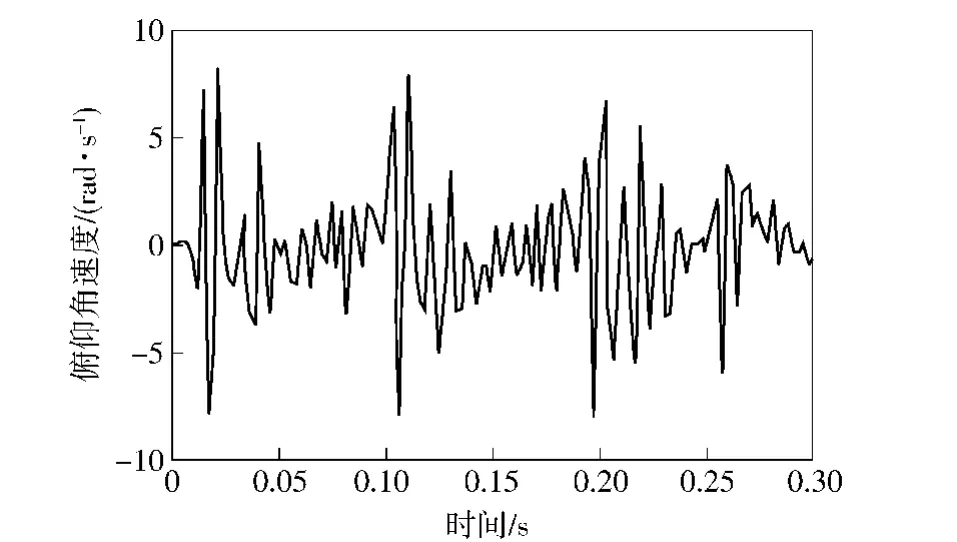
图14 枪身俯仰角速度曲线Fig.14 Pitching angular velocity of rifle
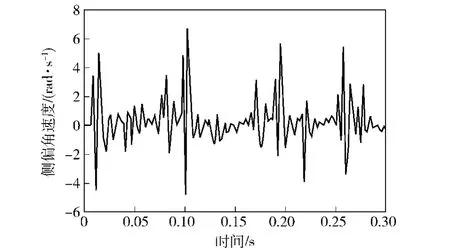
图15 枪身侧偏角速度曲线Fig.15 Yawing angular velocity of rifle
3.1高速摄影测量结果分析
由图7和图8可看出,在200 ms内,枪身后移幅值为55.2mm,人体肩部的后移幅值为51.4mm. 第1发枪弹发火后,人体肩部的水平位移相对于枪身的水平坐标有一滞后量,这是枪身后坐时压缩射手肩部肌肉、骨骼引起的,符合实际射击情况。
由图9和图10可以看出,自动步枪射击时自动机完成一次射击循环时间约90ms,枪膛合力及自动机前后运动过程中的撞击与高低仰俯偏转有明显的对应关系,每次撞击都引起枪身速度的剧烈变化,具体情况见图9第1个射击循环中的a、b、c标示。a由膛内火药气体对枪身的冲击产生;b由自动机后坐到位与枪托的撞击产生;c由自动机复进到位时与枪管尾部的撞击而产生。
由于枪弹发火后,弹丸在膛内运动时间约1ms,弹丸出枪口时枪身还来不及产生显著运动,故以枪身速度开始明显向后变化的瞬间测量3发弹丸出枪口瞬间,枪管轴线相对于初始瞄准位置的变化值。综合分析图7、图9、图10,3连发时间范围内,枪管轴线始终向上偏转。0.019 s时,第1发弹丸出枪口时,枪管轴线的高角增量约 0.2°,枪身后移约4.6mm;0.112 s时,第2发弹丸出枪口时,枪身轴线的高角增量约 1.12°,枪身后移约 22.8 mm;0.203 s时,第3发弹丸出枪口时,枪身轴线的高角增量约2.39°,枪身后移约55.2mm.由此可见,3连发射击时,后2发的运动规律不是第1发的简单重复,各个运动量都表现出很强的逐发累积效应,这表明人-枪系统的响应周期远大于武器发射的自动循环时间。
由图10、图11可以看出,在3连发时间范围内,枪身的俯仰角位移略小于射手上身的俯仰角位移,这是由于射击时射手对步枪下意识的主动作用使步枪相对于人体向下发生了一定的偏转。
3.2M TI惯性运动测量结果分析
如图12所示高速摄影与MTI惯性运动测量系统分别获得的枪身俯仰角位移曲线,从中可看出:MTI惯性运动测量系统获得的枪身俯仰运动情况与高速摄影获得的枪身俯仰运动规律基本相同。
每个射击循环中,对应枪膛合力达到最大、自动机向后运动到位和自动机向前运动到位3个特征点时刻,高速摄影和MTI惯性运动测量系统测得的枪口角位移如表1所示。由表1可见,3连发射击过程中,高速摄影与MTI惯性运动测量系统在各特征点时刻获得的俯仰角位移存在一定的测量误差,误差来源主要有3个部分:1)高速摄影机本身受分辨率、取景范围、拍摄角度、测量距离的限制存在一定的系统误差;2)射手射击时各特征点的运动不是简单的平面运动,而是多自由度的空间运动;3)高速摄影获得的角位移是通过特征点连线的斜率变化计算出来的,由于高速摄影获得的特征点位移存在误差,计算出来的角位移会放大这种误差。但总体上说,高速摄影和MTI惯性运动测量系统测得的各特征时刻俯仰角位移的数量级是一样的,相对误差范围均在10%以内,3发点射结束的瞬间,即0.203 s时,枪口向上偏转2.28°,与高速摄影获得的数据基本相同。这也进一步说明MTI惯性运动测量和高速摄影测量的角运动测量结果是可信的。
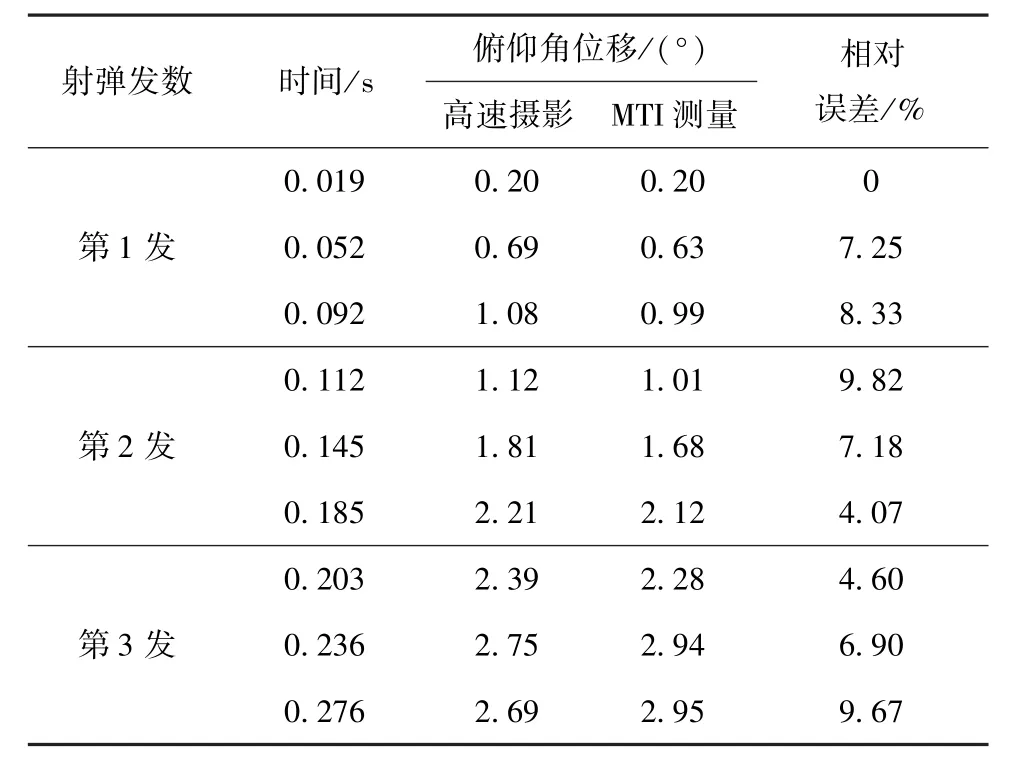
表1 特征点时刻枪身俯仰角位移对比Tab.1 The comparison of pitching angular displacements of rifle at feature point
由图13可见,3发点射时枪管轴线总体向右偏转。第3发弹丸出枪口时,枪管轴线的侧偏角增量约为0,第2发侧偏角的增量约1.2°,第3发侧偏角的增量约2.1°,这与3连发实弹射击弹着点沿右上方散布是一致的。但侧偏角位移并不向俯仰角位移那样单调增加,间或有所减小,而且在枪弹发火后的开始阶段变化较为缓慢。
由图14和图15可见,枪械的俯仰运动要比偏转运动剧烈。每一个射击循环中,俯仰角速度变化曲线上两个向上大幅度变化的地方,也反映了火药燃气和自动机后退到位的作用,但是由于这两个作用持续的时间非常短,因此产生的相应的角位移在枪身俯仰角位移曲线上体现的不是太明显。而且连发射击时,角运动特征点的重复性不如后坐运动那样好,尤其是侧偏方向上的角运动,出现了较大的离散性,反映了以人为支架的人-枪系统的随机性。
4 结论
本文构建了高速摄影和MTI惯性运动测量相结合的人-枪运动特性测试系统,运用该测试系统获得了某无托型自动步枪连发射击时枪身后坐位移、后坐速度、水平侧偏和垂直俯仰等人-枪运动参数。研究结果表明:该测试系统工作稳定、可靠、重复性好,能够全面、准确地反映射击时的人-枪运动特性,同时,对射击时人-枪系统运动规律分析和人-枪系统动力学模型的建立,具有重要的参考价值。
(References)
[1]孙海波,孔德仁,李永新,等.人枪系统动态特性实验测定[J].振动工程学报,2000,10(5):753-757. SUN Hai-bo,KONG De-ren,LIYong-xin,et al.Dynamic characteristics test on man-weapon system[J].Journal of Vibration Engineering,2000,10(5):753-757.(in Chinese)
[2]包建东,王昌明,孔德仁,等.人枪运动对射击精度影响的实验研究[J].仪器仪表学报,2006,27(6):1274-1276. BAO Jian-dong,WANGChang-ming,KONGDe-ren,etal.Experimental research ofman-gunmovement influencing automatic firing accuracy[J].Chinese Journal of Scientific Instrument,2006,27(6):1274-1276.(in Chinese)
[3]张海鹏,党幼云.基于MEMS传感器的人体运动捕捉系统[J].西安工程大学学报,2012,26(1):82-86. ZHANG Hai-peng,DANG You-yun.Human motion capture system based on MEMSsensors[J].Journal of Xi'an Polytechnic U-niversity,2012,26(1):82-86.(in Chinese)
[4]张玉磊,陈进.基于MTI系统的三维运动检测方法的研究[J].测控技术,2008,27(5):34-36. ZHANG Yu-lei,CHEN Jin.Research on themeasurement of 3D motion based on MTI[J].Measurement&Control Technology,2008,27(5):34-36.(in Chinese)
[5]乔熠辉,程辉,马炎.基于MTI的三维姿态测量系统研究[J].测试技术学报,2011,25(6):525-528. QIAO Yi-hui,CHENG Hui,MA Yan.MTI-based 3D attitude measurement[J].Journal of Test and Measurement Technology,2011,25(6):525-528.(in Chinese)
[6]夏显峰,王垣,张华,等.基于微机械惯性器件的GPS实时姿态测量系统[J].传感器与微系统,2010,29(8):141-144. XIA Xian-feng,WANG Yuan,ZHANG Hua,etal.GPS real time attitude determination system based on MEMS inertia devices[J]. Transducer and Microsystem Technologies,2010,29(8):141-144.(in Chinese)
[7]刘俊,石云波,李杰.微惯性技术[M].北京:电子工业出版社,2005:266-267. LIU Jun,SHIYun-bo,LI Jie.Micro inertia technologies[M]. Beijing:Publishing House of Electrical Industry,2005:266-267. (in Chinese)
M easurement of Motion Characteristics on Human-rifle System Based on the Combination of M icro Inertial Motion Tracker Instrument and High-speed Photography
GONG Peng-han1,2,ZHOU Ke-dong1,KANG Xiao-yong2,HE Lei1
(1.School of Mechanical Engineering,Nanjing University of Science and Technology,Nanjing 210094,Jiangsu,China;2.The 1st Department,Ordnance Engineering College,Shijiazhuang 050003,Hebei,China)
Themotion parameters of human-rifle system are the important basis ofweapons ergonomic evaluation and human-rifle system dynamicsmodeling in the process of automatic weapon shooting.In order to obtain themotion characteristics of the human-rifle system and quantitatively estimate itsmotion parameters during shooting of a bullpup rifle,a new method is explored formeasuring the human-rifle system,which is a high-speed photography combined with inertialmeasurement ofmotion tracker instrument (MTI).The proposedmethod is to use themotion information ofmotion feature points of human-rifle system taken by a high-speed camera to obtain the motion law of the human-rifle system in the pitching through the correlation processing,and the muzzle response of the rifle ismeasured using MTI inertial measuring instrument at the same time.Themotion results at the pitching anglesmeasured by high-speed photography and MTIare compared and analyzed.The experimental results show that the resultsmeasured using high speed photography and MTIare believable.
ordnance science and technology;human-rifle system;motion parameter;high-speed photography;inertialmotion measurement
TJ06
A
1000-1093(2015)12-2224-07
10.3969/j.issn.1000-1093.2015.12.003
2015-03-03
宫鹏涵(1981—),男,讲师,博士研究生。E-mail:gongpenghan@126.com;周克栋(1964—),男,教授,博士生导师。E-mail:zkd81151@126.com
猜你喜欢
文萃报·周二版(2022年24期)2022-06-16
小哥白尼(趣味科学)(2022年1期)2022-04-26
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
大科技·百科新说(2021年10期)2021-12-31
发明与创新(2021年39期)2021-11-05
小哥白尼(军事科学)(2021年6期)2021-11-02
中学生数理化·八年级物理人教版(2021年3期)2021-07-22
小猕猴学习画刊·下半月(2019年6期)2019-08-13
军事体育学报(2016年2期)2016-06-15
中学生数理化·八年级物理人教版(2014年1期)2015-01-09