
工业机器人应用技术实验实训室建设与研究*
2015-09-16 00:42杨秀文广东松山职业技术学院广东韶关512126
机电工程技术 2015年6期
杨秀文(广东松山职业技术学院,广东韶关512126)
工业机器人应用技术实验实训室建设与研究*
杨秀文
(广东松山职业技术学院,广东韶关512126)
主要从工业机器人应用技术实验实训室软、硬件建设与实验实训项目体系构建等方面进行研究探讨,针对项目开发中的技术要点展开分析,对项目体系工作流程进行了详细阐述,概述了实验实训项目开发中的应用体会。
工业机器人;实验实训室;项目体系开发;系统控制
0 引言
随着工业技术不断向智能化方向发展,工业机器人应用技术越来越广泛地应用于各行各业,工业机器人已成为高新技术产业之一,对工业生产和社会发展起着重要作用。工业机器人应用技术实验实训室的合理建设与开发对培养工业机器人应用技术生产一线的高技能人才至关重要。
1 实验实训室硬件及软件建设
工业机器人应用技术实验实训室采用理实一体化课室,划分为多媒体教学区、实操区。多媒体教学区应配备足够电脑,根据课程教学体系需要安装的软件包括FX-3U程序设计软件及仿真软件、WinCC组态软件,OPC信息采集软件、ABB工业机器人RobotStudo软件等等,为学生提供ABB工业机器人操作学习视频。
实验实训室操作区根据功能分为五大工作站,分别为总控制站、焊接站、数控加工站、视觉检测站和装配仓储站五大模块。实验实训室配置的可编程控制器采用三菱FX-3U系列PLC,主站与从站之间采用CClink通讯,焊接站配备弧焊机器人,总控制站配备搬运机器人,视觉检测站配备工业照相机及视觉检测系统完成工件宽度及半径检测,装配仓储站配置堆垛仓储机器人,完成工件循环搬运仓储工作。
2 工业机器人应用技术实验实训室功能体系构建
2.1实验实训所能覆盖的课程
工业机器人应用技术实验实训覆盖电工电子技术、液压与气动技术、工业机器人应用技术、SIMATICWinCC Explore组态软件、MX OPCCon⁃figurator软件、传感器与检测技术、可编程控制器原理与应用(FX系列)、现场总线技术等课程,使学生综合掌握工业控制监控组态及OPC数据采集、三菱FX系列程序编程调试、CClink网络通讯、步进电机驱动、工业机器人示教编程与操作、工业机器人自动焊接系统参数设置与焊接操作等综合训练[1-2]。
工业机器人应用技术实验实训室的建设能够为工业机器人应用技术、机电维修与管理专业、机电一体化专业、电气自动化专业级、机械制造与自动化专业等提供相关的实验、实训、毕业设计等实践环节的训练。运行实践证明该项目的建设符合社会需求、满足相关专业技能培养的需要。
2.2功能包含技术要点
(1)WinCC组态软件。包括WinCC组态软件的系统环境设置、变量建立与采集,过程画面创建、变量关联仿真、消息系统设置、报表脚本系统等基本操作及软件深化学习训练。
(2)可编程控制器技术。在实验实训中强化SFC编程技能,灵活使用传感器、深化步进电机驱动、理解PLC与工业机器人之间I/O连接与通讯、掌握机器人输入输出信号接线方法。步进电机驱动控制如图1所示[3],其中Y2、Y3为方向控制信号,M8029为脉冲输出结束标志。PLC与机器人之间I/O连接与通讯地址如表1所示。
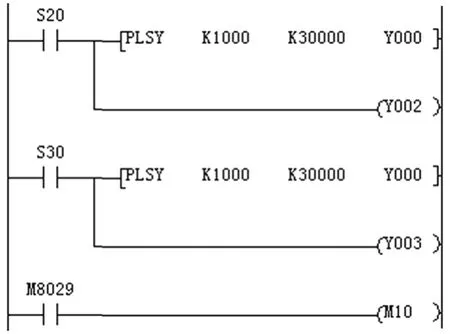
图1 步进电机驱动程序
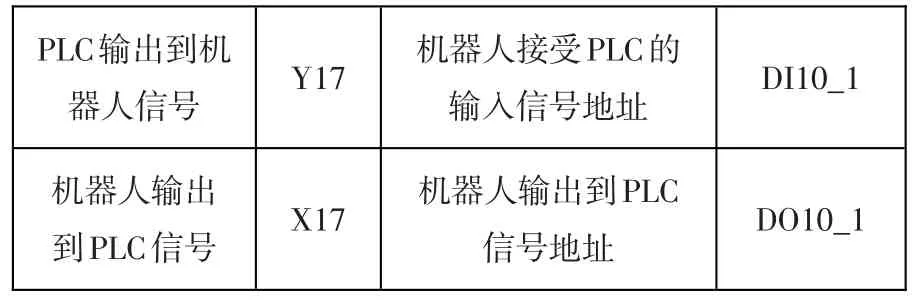
表1 PLC与机器人通讯地址
(3)OPC数据采集软件。包括与三菱仿真软件程序信息采集和与FX-3U系列PLC信息采集;变量的建立、程序的仿真等。
(4)FX系列可编程控制器CClink网络通讯。利用CClink网络进行主从站通信,实现系统的集中和远程控制。包括合理设置各从站的站号及所占站数,确定启动数据链接方式,合理分配主从站通讯地址,编写主、从站通讯程序等。主站CClink通讯程序设计流程如图2所示,从站1通讯程序如图3所示[4]。
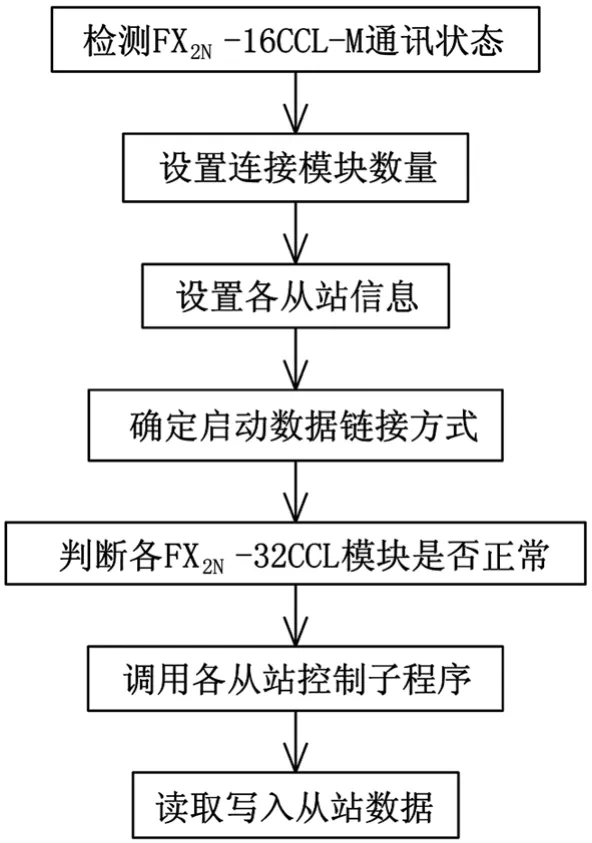
图2 主站CClink通讯设计流程
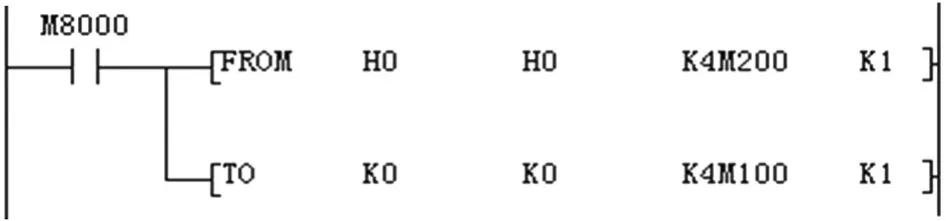
图3 从站1CClink通讯程序
3 工业机器人应用技术实验实训项目开发
工业机器人应用技术实验实训室的总控制站、焊接站、数控加工站、视觉检测站和装配仓储站五大模块各工作站既可单独编程控制调试,也能过总控制站联机控制。
3.1焊接站
焊接站包括电气控制柜、出料模块、搬运机械手、焊接工作台、焊接机器人、接料台五大部分。电气控制柜由PLC、CClink通讯模块、漏电开关、电源开关按钮、启停按钮、复位急停按钮等电器元件组成。焊接单元接收到启动信号,工件从出料模块料仓落到带料转盘,带料转盘由步进电机驱动,当物料由传动带输动到传动带末端,传感器信号输出,由搬运机器手搬用物料到焊接转盘,工件由转盘驱动到焊接工位,当焊接工作台夹紧推杆伸出固定工件后,PLC发出信号Y17,机器人输入信号DI10_1为1,焊接机器人动作,焊接完成机器人输出信号DO10_1输出,PLC输入信号X17接通,夹紧推杆复位,转盘驱动,工件到位后由搬运机器手将工件搬运到接料台放下,机器手下限位信号输出,此输出信号通过CClink通讯传送到主站,由主站控制搬运机器人将工件搬运至数控加工站。
3.2数控加工单元
数控加工单元配置电气控制柜和数控铣床,数控铣床为FANUC 0imate-MD系列,数控铣床工作台配置液压站和安全防护罩。液压站由液压卡盘、液压换向电磁阀等组成,完成工件的夹紧定位。安全防护罩由罩子及开门气缸等组成。数控机床加工站接收启动信号,防护罩前门上升到上限,发出信号到主站,工件经过焊接站将工件焊接完成后由搬运机器人搬运到该站,防护罩前门下降至下限,液压站夹紧装置夹紧工件,进行钻孔加工,加工完成,液压夹紧装置松开,防护罩前门上升到上限,发出信号到主站,搬运机器人搬运工件到视觉检测站。该站运用了PLC与数控机床结合的技术,再加上液压站、液压卡盘等达到自动生产的效果。通过本站可以进行PLC、液压、数控机床等多项训练,更加了解液压技术的控制及工作原理,数控与PLC的通讯及工作原理等。
3.3视觉检测单元
视觉检测单元设备构成包括电气控制柜、视觉检测系统(工件宽度检测系统、工件半径检测系统)、龙门机器手、传送带、挡料杆等装置。由数控加工站搬运的工件经传送带传送,通过工业照相机拍摄成像,使用工件尺寸测量系统对比宽度、半径加工精度。合格产品通过传送带传送至装配仓储站,对不合格工件,使用龙门机器手从输送带剔除。
3.4装配仓储站
装配仓储单元由电气控制柜、配件送料装置、输送带、机器人四大部分组成。配件送料装置送料转盘由步进电机驱动。由视觉监测站检测合格的工件传送到位,送料装置推出工件,使用工业机器人实现装配,装配完成后使用机器人放置工件入库实现仓储。实训中联机调试时要求完成四个合格工件的工作循环仓储,需堆垛仓储四个工件,此时机器人要求采用循环指令进行编程控制。
3.5总控制站
总控制站配置主站PLC、搬运机器人、主控台电脑,完成各站联机控制和搬运机器人的控制,实现工件由焊接站到数控加工站、数控加工站到视觉检查站的搬运。
生产线联机控制流程为主站发出启动指令,焊接站将工件由出料模块传送搬运至焊接工作台进行焊接,焊接完成后将工件搬运至接料台,发出指令至主站,主站发出指令到数控加工站,数控机床加工站安全防护罩前门上升,搬运机器人将工件由焊接站搬运到数控站加工,加工完成发出信号到主站,搬运机器人搬运工件到视觉检测站,主站发出信号至视觉检测站进行半径和宽度检测,合格工件传送至装配仓储站进行装配仓储,主站控制完成四个合格工件的堆垛仓储。
4 结束语
在实训中,要求学生自测PLC及机器人输出输出信号地址,强化电工及PLC操作技能、熟悉工作流程,每个项目要求学生进行系统的PLC控制、监控组态控制、机器人示教编程,完成全面训练。为实现单机与联机控制,各分站启动、停止等与主站重叠信号在程序中应进行合理的并联设计。
实验实训室可编程控制器系统采用CClink通讯,为学习总线技术提供了更多训练,拓宽控制技术,对FX-3U实训编程进行了深度研究。
在实训过程中采用分组轮换实训方式,每个工作站要求既能采用电气柜面板开关进行操作,也能利用监控组态软件界面控制,充分利用实训资源,综合掌握专业知识。
实验实训项目的合理开发能够培养学生良好的协作能力,使之具有自主学习新知识、新技能的主动性和方法。工业机器人应用技术实验实训室建成以来,为相关专业开设了大量的实验实训课程,使用率达到90%以上,开发的实验实训项目体系适合社会岗位需求,相关专业学生就业率高,待遇好,受到合作企业的高度认可。
[1]罗庚合.机电一体化实验实训项目建设[J].实验室研究与探索,2009(28):172.
[2]魏志丽.虚拟工业机器人实验实训室的建设与研究[J].自动化技术与应用,2013(32):85.
[3]张万忠.可编程控制器应用技术[M].北京:化学工业出版社,2012.
[4]三菱公司.FX2N-16CCL-M和FX2N-32CCL CC-Link主站模块和接口模块用户手册[Z].菱电自动化有限公司,2010.
(编辑:阮毅)
The Construction and Research of the Industrial Application Experimental Robot Laboratory
YANG Xiu-wen
(Guangdong Songshan Polytechnic College,Shaoguan512126,China)
This article is mainly about the industrial robot laboratory soft-hard ware construction,experiment projectsystem construction and other aspects of research.Analyzed on technical points in the development of the project,detailed introduced the projectwork flow system,summarized theapplication experience in the developmentofexperimental training project.
industrial robot;laboratory;projectsystem development;system control
TP242.2 G482
A
1009-9492(2015)06-0021-03
10.3969/j.issn.1009-9492.2015.06.005
*央财支持高职院校提升专业产业服务发展能力项目(编号:教职成2001(11号))
2015-03-16
杨秀文,女,1972年生,河北唐山人,硕士,讲师。研究领域:机电一体化技术。已发表论文7篇。
猜你喜欢
制造技术与机床(2019年7期)2019-07-22
深圳职业技术学院学报(2018年3期)2018-07-23
现代机械(2018年1期)2018-04-17
电子制作(2018年1期)2018-04-04
电子设计工程(2017年20期)2017-02-10
电子制作(2017年23期)2017-02-02
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
焊接(2015年9期)2015-07-18
电测与仪表(2014年18期)2014-04-04
电测与仪表(2014年13期)2014-04-04
