TMS570处理器NHET功能的直流无刷电机测速设计
2015-09-12 06:43:04蒋文斌
单片机与嵌入式系统应用 2015年11期
蒋文斌
(西安铁路信号有限责任公司,西安710048)
引 言
在直流无刷电机(BLDC)控制系统中,对电机转速的测量是一项重要且关键的问题。目前存在多种测速手段:利用编码器测速、利用霍尔(HALL)信号测速、利用电机反向电动势测速等等。其中,利用编码器测速方法的优点可以达到高分辨率的要求,但需增加成本和体积;利用电机反向电动势测速的优点是无需提供额外硬件接口,缺点是测速软件算法复杂。本文介绍了一种利用HALL 信号、基于TMS570处理器NHET 功能的BLDC 测速软件设计方案,此方案可实现速度测量精度和软硬件复杂程度之间的平衡,同时在软件设计过程中采用提高可靠性的算法确保速度测量的可靠和准确。
1 TMS570处理器及NHET功能简介
TMS570系列处理器是TI公司推出的一种面向高性能交通运输领域的安全MCU,该系列MCU 基于ARM Cortex-R4F内核架构,具有较高的性能并满足IEC61508 SIL-3的安全要求,主要应用于汽车工业,如刹车防抱死系统(ABS)、电助力转向(EPS)、HEV/EV 逆变器系统。
TMS570 系列处理器集成了第4 代高端定时器(NHET),NHET 使用高分辨率硬件通道并提供针对实时环境下的精确周期、脉冲测量功能、输出比较功能、PWM 功能。NHET 采用独立的指令结构和“时序决议循环”机制使时间分辨率达到ns级别,完全满足各种高精度时间测量应用需要,其内部集成可编程的抑制滤波器,确保测量数据的可靠性要求。
2 BLDC测速硬件接口设计
测速硬件结构示意图如图1 所示。BLDC 硬件测速接口设计较为简单,将HALL信号进行数字隔离后,直接接入TMS570的NHET 引脚即可,将3个HALL信号同时引入NHET 进行测速是一种硬件冗余设计,其目的是提高BLDC 速度测量的可靠性,防止由于单通道HALL输入信号失效导致整个测速功能无法完成的情况发生。
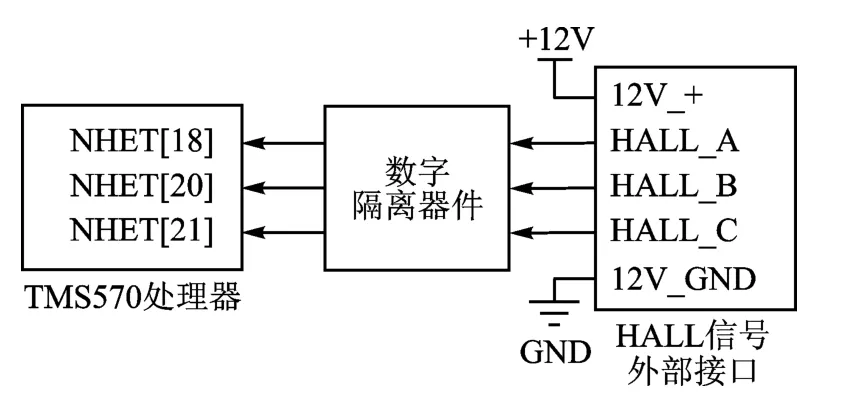
图1 测速硬件结构示意图
HALL信号输入采用DC 12V 电平,经数字隔离后输出DC 3.3V 电平,直接作为MCU 输入。当BLDC转动时,HALL信号的时序与相位关系如图2所示。

图2 BLDC顺时针转动HALL信号时序相位图
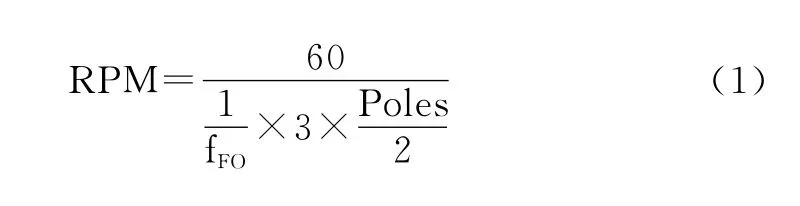
由图2可知:BLDC转速可通过测量单个HALL信号的频率计算得出,BLDC 转速(RPM,转/分钟)与HALL信号频率(fFO,Hz)、BLDC 磁极对数(Poles)之间的关系式为:
3 NHET测速软件设计
NHET 测速软件的核心测速代码采用独立的指令结构和时序决议机制实现,NHET 采用精简指令集(RISC)结构,包含22条指令,使用NHET 汇编器将指令代码生成C语言结构的代码,需在运行之前由应用程序拷贝到NHET RAM 中,NHET 汇编器同时生成.h文件,由应用程序对测量数据进行访问,时序机制如图3所示。
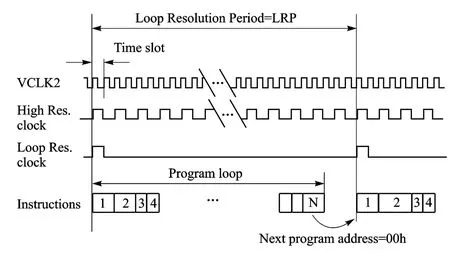
图3 NHET指令执行时序图
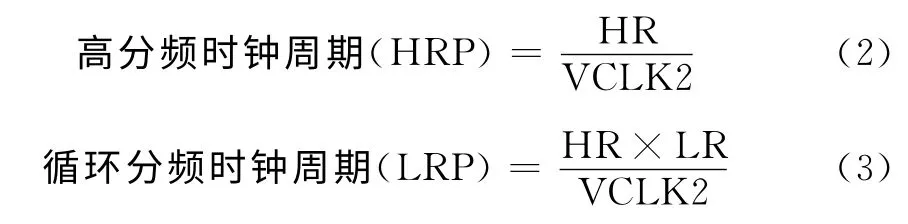
NHET 时钟由VCLK2驱动,每个VCLK2周期称为一个“时隙”(Time slot),将VCLK2 进行高分辨率分频(High Res.clock)和循环分频(Loop Res.clock)后得到高分频时钟、循环分频时钟,这两个时钟的周期为:
在此程序循环中包含1~N 条NHET 指令。由于不同的指令代码执行时间不同,在设计时应注意程序循环内所有代码执行时间的和不能超过一个循环分频时钟周期。由上文所述,利用BLDC的霍尔信号测量转速,即测量霍尔信号的周期,使用NHET 指令集中的PCNT 指令实现,PCNT 指令捕捉NHET 输入引脚信号的边沿并使用高分辨率时钟进行周期计数,将周期时间数据存储在内部寄存器中供应用程序读取,以PCNT 指令捕获输入脉冲信号时间为例,指令执行逻辑及时序如图4所示。
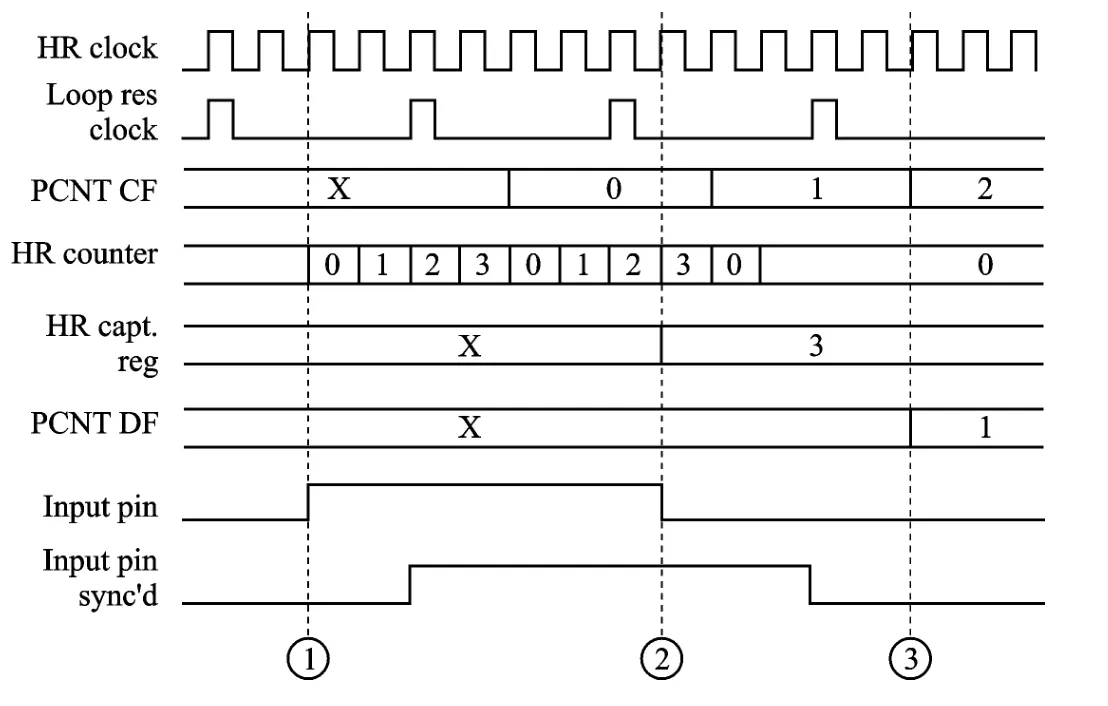
图4 PCNT指令逻辑及时序图
图4中①~③含义如下:
①当检测到输入引脚的上升沿后,HR 计数器开始由零进行加计数,当计数器满后,向指令数据区加1,并从0重新开始计数;
②当检测到输入引脚的下降沿后,将HR 计数器内的数据存入捕获寄存器(HR capt.reg);
③PCNT 指 令 在 同 步 输 入 信 号(Input pin sync'd)由低变高后开始执行,在该信号由高变低后,得到数据区数据(lr_data)和捕获寄存器内的数据(hr_data)之和即为脉冲时间。
HALL信号的周期为HALL输入信号的上升沿到下降沿或下降沿到上升沿的时间,编写PCNT指令参数如下:L01:PCNT{next=L02,irq=ON,type=RISE2RISE,pin=18};
L02:PCNT{next=L03,irq=ON,type=FALL2FALL,pin=20};
L03:PCNT{next=L01,irq=ON,type=RISE2RISE,pin=21};
其中每一条指令对应一个通道的HALL 输入信号,当指定引脚(pin)测量到一个完整的HALL周期后,产生一个NHET 指令中断(irq=ON),信号触发的类型(type)包括上升沿到上升沿(RISE2RISE)和下降沿到下降沿(FALL2FALL)两种,使用不同的信号触发类型测量HALL信号周期的目的是通过简单的软件代码异构保证测量结果的可靠性。
当VCLK2时钟为70 MHz时,选取高分频为7,循环分频为8,可得

因此,经由NHET 测得的HALL信号周期为:

当选取BLDC磁极对数为10时,将(4)带入式(1),得出BLDC转速(RPM)与NHET 测量数据之间的关系式为:

为防止HALL 信号因外界干扰产生的测量结果误差,除了使用NHET 自身带有的硬件抑制滤波器外,在软件的设计过程中也应加入适当的滤波处理,保证测量结果的准确、可靠,使用一个系数为0.75的单极性I2R 低通滤波器的C语言代码如下:

为提高测速软件的可靠性,软件采用结构容错的设计思路进行设计,由于测速硬件采用3通道冗余采集HALL输入信号,软件采用N 版本程序设计方案。N 版本程序设计是指对于一个给定的功能,由N(N>2)个不同的设计组独立编制出N 个不同的程序,然后通过运行N 个不同的程序得出结果并进行比较,输出正确的数据。基于TMS570NHET 功能测速软件N 版本程序设计基本结构如图5所示。
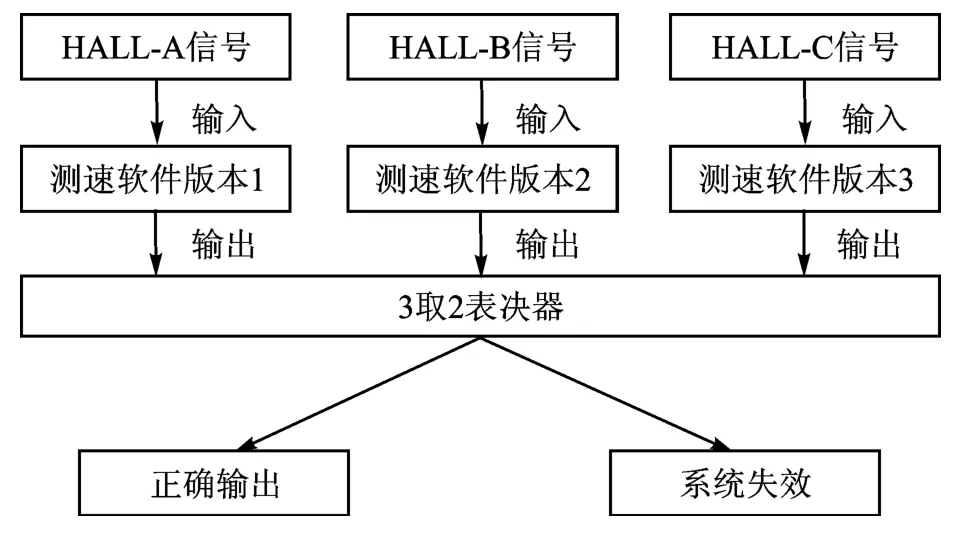
图5 测速软件N版本程序设计基本结构
结 语
本文提出了一种基于TMS570系列处理器NHET 功能的直流无刷电机测速软件设计方案,其中包括NHET测速原理介绍和代码实现、对测量结果的软件滤波算法设计、基于N 版本软件容错设计方法提高软件可靠性。该测速方案已应用在采用TMS570LS20216处理器的自动门控制单元硬件之上,实际测试和应用的结果表明该方案切实可行。
[1]TI.TMS570LS Series Microcontroller Technical Reference Manual(TRM),2011.
[2]陆民燕.软件可靠性工程[M].北京:国防工业出版社,2014.
[3]Rozanski,N.Woods.E.软件系统架构:使用视点与视角与利益相关者合作[M].2版.侯伯微,译.北京:机械工业出版社,2013.
[4]Len Bass,Paul Clements,Rick Kazman.软件架构实践[M].3版.北京:清华大学出版社,2013.
[5]EN 50126-Railway applications-The specification and demonstration of Reliability,Availability,Maintainability and Safety(RAMS),1999.
[6]EN 50218Railway applications-Communication,signalling and processing systems-Software for railway control and protection systems,2011.
猜你喜欢
科普童话·神秘大侦探(2023年1期)2023-05-30 12:48:10
中国农业信息(2023年3期)2023-03-18 08:19:04
中国农业信息(2021年3期)2021-11-22 06:44:48
数学小灵通·3-4年级(2021年9期)2021-10-12 05:47:46
小学生学习指导(低年级)(2020年10期)2020-11-09 09:21:58
测控技术(2018年5期)2018-12-09 09:04:26
电子测试(2018年18期)2018-11-14 02:30:34
数学大王·中高年级(2017年2期)2017-02-08 15:52:55
电子制作(2016年15期)2017-01-15 13:39:08
学苑创造·A版(2016年4期)2016-04-16 17:57:51