
论自动防跑车在煤矿使用中的问题及系统优化设计成果总结
2015-09-11 05:03郝家强
科技与创新 2015年18期
关键词:煤矿
郝家强
摘 要:防跑车装置对斜井安全运输起着至关重要的作用,被广泛用于井深长超过200 m的斜井。对自动防跑车系统优化程序进行控制设计,对ZDC30-1.2跑车防护装置做出了清零传感器位置的变化及PLC两限位控制程序的修改,以及PLC控制程序根据相序变化的修改,经过改进,该设备在-960 ~-817 mC13底板轨道下山能更好的发挥作用。
关键词:自动防跑车;斜井运输;控制设计;煤矿
中图分类号:TD55+3 文献标识码:A DOI:10.15913/j.cnki.kjycx.2015.18.109
1 项目名称
本项目的名称为自动防跑车系统优化程序控制设计。
2 项目实施时间
本项目的实施时间为2011-08-20.
3 项目创新要点
3.1 概述和原理
防跑车装置对斜井安全运输起着至关重要的作用,被广泛用于井深长超过200 m的斜井。正常情况下,防跑车装置中的PLC主机通过由滚筒编码器传来的脉冲信号控制防跑车挡网的挡车和上提过车两种状态。ZDC30-1.2跑车防护装置是一种常闭式跑车防护装置,可随时起到逮车的作用,安全性较高。斜井走钩时,绞车转动,绞车滚筒传感器通过感应滚筒上间隔分布的金属块计算脉冲数,并上传至PLC主机,矿车经过清零传感器后PLC主机脉冲数清零,开始计数。矿车行驶到预先设定的位置(脉冲数达到设定值后)时,防跑车挡网打开,矿车通过后,当脉冲数达到下一个设定值时挡网下落。绞车提物时,滚筒反转,滚筒上的2个传感器的感应顺序改变、脉冲数递减,因此,只需具备两个挡网动作设定值即可。
3.2 创新点
-960~-817 mC13底板轨道下山有2种特殊情况:①该斜井兼作提人斜井,安装有猴车,猴车运行时,受巷道宽度的限制,自动防跑车装置在正常挡车状态下挡网阻碍了猴车的座椅,导致猴车无法运行。②该斜井涉及3个水平,即-960~-817 m和-960~-817 m的2个水平的运输线路,清零传感器设在上口车场的变坡点,距过车时挡网提升的适宜位置过远,且挡网动作的脉冲设定值较大,累计较大的脉冲数时易产生明显的误差。
为了解决以上问题,对ZDC30-1.2跑车防护装置进行了如下修改。
3.2.1 改变了清零传感器的位置
清零传感器的位置由斜井上口车场变坡点移至井身-920 m左右。该改动使清零传感器距触发挡网动作的适宜位置较短,且脉冲设定值较小,允许脉冲数累计过程中所产生误差的行程较短,有效减少了因绞车振动、松拉重车等而产生的滚筒传感器计数误差。
3.2.2 修改了PLC两限位控制程序
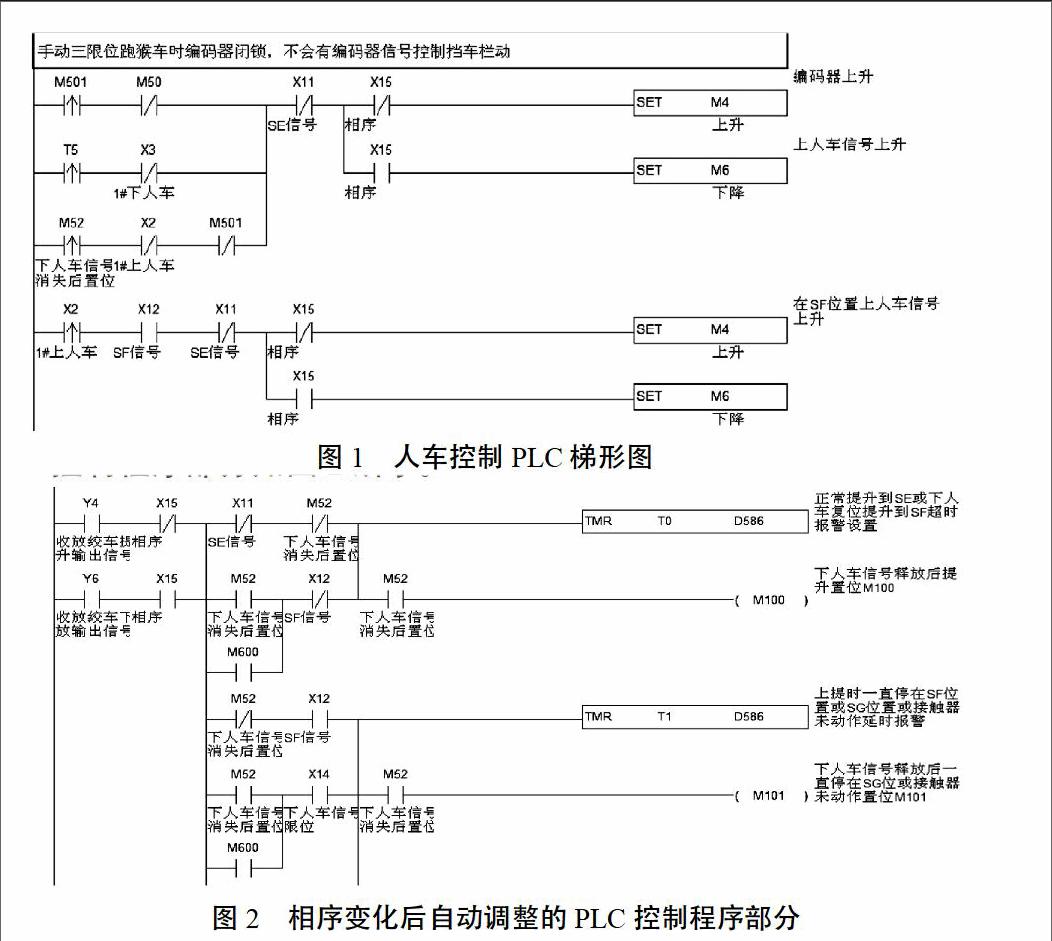
在以往PLC控制程序的基础上增加了人车控制程序。由初始的两限位,即上限位(过车位)和下限位(挡车位),增加至上限位、下限位和下下限位(人车位),即斜井上口自动防跑车控制信号显示箱分为人车挡和货车挡,当需要猴车提人时,打至人车挡,下口挡网通过PLC主机程序控制自动落到轨道上,猴车开启后正常运行;当需要猴车提物时,打至货车挡,挡网自动恢复到挡车状态,PLC主机控制程序自动切换为初始两限位控制。人车控制PLC梯形图如图1所示。
图1 人车控制PLC梯形图
3.2.3 根据相序变化修改了PLC控制程序
该自动跑车防护装置配备了相序保护器,当相序改变时,为了防止控制挡网的电机反向运转,进而造成挡网误动作或电机过载,相序保护器会自动切断程序控制,相序恢复正常后,跑车装置继续动作。
在该装置的运行中,偶尔会出现挡网误动作或电机过载现象,给检修人员带来了一定的麻烦,且影响了正常走钩。因此,修改了PLC控制程序,当相序改变后,设备会自动执行相应的指令,使电机保持正确的运转方向。相序变化后自动调整的PLC控制程序部分如图2所示。
图2 相序变化后自动调整的PLC控制程序部分
4 技术成果
经过上述改进,该设备在-960~-817 mC13底板轨道下山中发挥了更好的作用。在改进前,因常出现较大的误差和挡网不动作问题,导致猴车掉道时常发生,甚至存在矿车撞坏挡网的情况,造成了一定的经济损失;改进后,设备运转正常,安全效益得以体现,使该斜井走钩在安全方面得到了保障。
〔编辑:张思楠〕
猜你喜欢
中原商报·科教研究(2022年1期)2022-05-13
电子乐园·上旬刊(2022年5期)2022-04-09
阳光(2022年4期)2022-04-03
阳光(2022年3期)2022-03-03
阳光(2022年2期)2022-02-04
阳光(2022年1期)2022-01-17
科学导报(2020年82期)2020-12-23
科学导报(2020年83期)2020-01-13
知识文库(2018年2期)2018-05-14
三联生活周刊(2015年52期)2015-12-25
