双电机同轴驱动系统功率追踪算法研究
2015-09-09 17:42薛晨旭韩峻峰林川潘盛辉杨峰
计算技术与自动化 2015年2期
薛晨旭+韩峻峰+林川+潘盛辉+杨峰

摘 要:研究同轴双电机负载功率追踪问题,在该系统中,两台电机速度被强制同步,由于两台相同电机参数略有差异,将导致功率分配不平衡。基于功率平衡要求,根据矢量控制理论,将交流异步电机的电机转矩和电机磁通的解耦,得到双电机功率(电流)追踪的数学模型,通过设计模糊控制器与迭代算法进行控制,进行了同轴双电机功率追踪问题仿真。仿真结果表明,模糊PID控制与迭代算法控制的系统相比,可以提高功率跟踪的响应速度,更快达到功率平衡。
关键词:双电机;功率追踪;模糊控制器;迭代算法
中图分类号:TM343 文献标识码:A
Algorithm of coaxial dual-motor drive system power tracking
XUE Chen-Xu1*, HAN Jun-feng2, LIN Chuan1, PAN Sheng-hui1, YANG Feng1
- College of Electrical and Information Engineering, Guangxi University of Science and Technology, Liuzhou 545006 China;
2.Department of Electrical Engineering, Guangxi Technological College of machinery and electricity, Nanning 530007 China)
Abstract: Research coaxial dual-motor load power tracking. In this system, two synchronous motors speed is forced. Due to the slight difference in the two identical motor parameters, it will lead to uneven distribution of power. According to the vector control theory, the AC motor torque and motor flux decoupling induction motor. The mathematical model of dual-motor power (current)-tracking, is controlled by fuzzy controller design and iterative algorithm to solve the power to track all issues. Simulation results show that the fuzzy PID control system compared with the control iterative algorithm can improve the response speed power-tracking, and faster to achieve power balance.
Keywords: Dual-motor; power point tracking; fuzzy controller; iterative algorithm
1 引言
双电机硬轴联接驱动同一负载时,即使同批次的相同型号电机也极难达到各项参数完全一致,因此它们所分担的负载就不可能完全相等,从而导致两个电机输出功率出现偏差,容易使其中一台电机工作在轻载状态,而另一电机工作在过载状态,造成电机过负荷。为改善这种情况,将负载进行合理分配,双电机的功率平衡问题就必须得到解决 [1]。
自从上世纪80年代 Koren提出交叉耦合控制算法之后[2],许多专家针对“多电机协调控制”这一课题展开了一系列的研究。国内,汤杰,李志勇针对刚性硬联的双电机同步传动系统的功率分配问题提出主从控制方案[3],在同步运行中确保功率平衡。田瑞,赵艳提出了变频器的主/从功能在多电机传动系统中的应用[4],解决了多台电机同时驱动同一负载的功率平衡问题。张超,裴延涛提出了基于矢量控制思想的同轴硬联双电机负载平衡系统[5],并且将交叉耦合及主从控制的概念运用于其中,从而实现双电机承担相等负载的实验目的。
上述文献均较少提及从电机功率跟踪过程中的精确的数学模型,因此对双电机功率追踪精确数学模型的算法研究是一个新的研究点。本文以双电机同轴驱动系统为对象,通过矢量控制理论,将交流异步电机的电机转矩和电机磁通的解耦,建立了双电机功率追踪系统的数学模型。在主从控制和交叉耦合的基础上,设计了模糊参数自整定PID控制器以及基于迭代算法的控制器,均获得了精确的控制效果。通过比较,模糊参数自整定PID控制器提高了响应速度,解决了功率平衡问题,改善了系统的动态性能。
2 双电机同轴运行功率不平衡的Simulink仿真
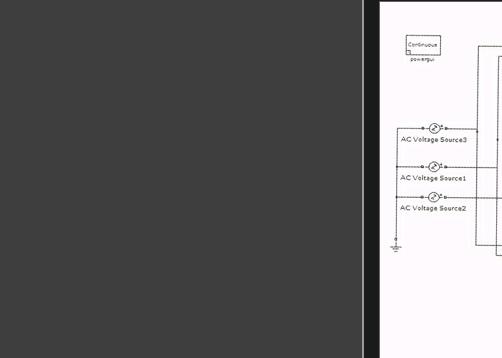
由双电机同轴运行功率平衡定义[6]可知,在双电机同轴拖动同一负载时,两台电机额定功率相同,即使两台电机的其他参数不相同时,其所分配的负载力矩也必须是相同的。选择电机为鼠笼式异步电机,在本次仿真试验中采用星型接法。电源的三路输入信号的初始相位分别设置为0°,120°,240°,电压设置为380V,频率为50Hz。在MATLAB/SIMULINK中创建双电机同轴模型,如图1所示:
图1 双电机功率不平衡仿真实验
两台电机额定功率均为15kW,其中电机1转子电阻为2.65Ω,电机2转子电阻为3.65Ω,两台电机的输出转矩差如图2所示:
图2 功率不平衡输出转矩差
如图2所示,在输入负载转矩为60NM时,电机1输出转矩为38NM,电机2输出转矩为22NM,这说明两台电机在定子电阻相差1欧姆时,两台电机输出功率相差1.7倍以上,出现了严重的功率不平衡。因此,在该系统中,必须进行功率平衡的控制。
3 双电机硬轴驱动系统数学模型的建立
系统采用主从控制方法对双电机进行控制,通过微处理器产生变频控制信号[7],将主从电机的负载转矩(定子电流)进行比较,进而控制从电机,达到改变从电机负载转矩与主电机平衡的目的,从而通过控制从电机的变频调速过程实现两台电机的功率平衡。
3.1 变频器环节的数学模型
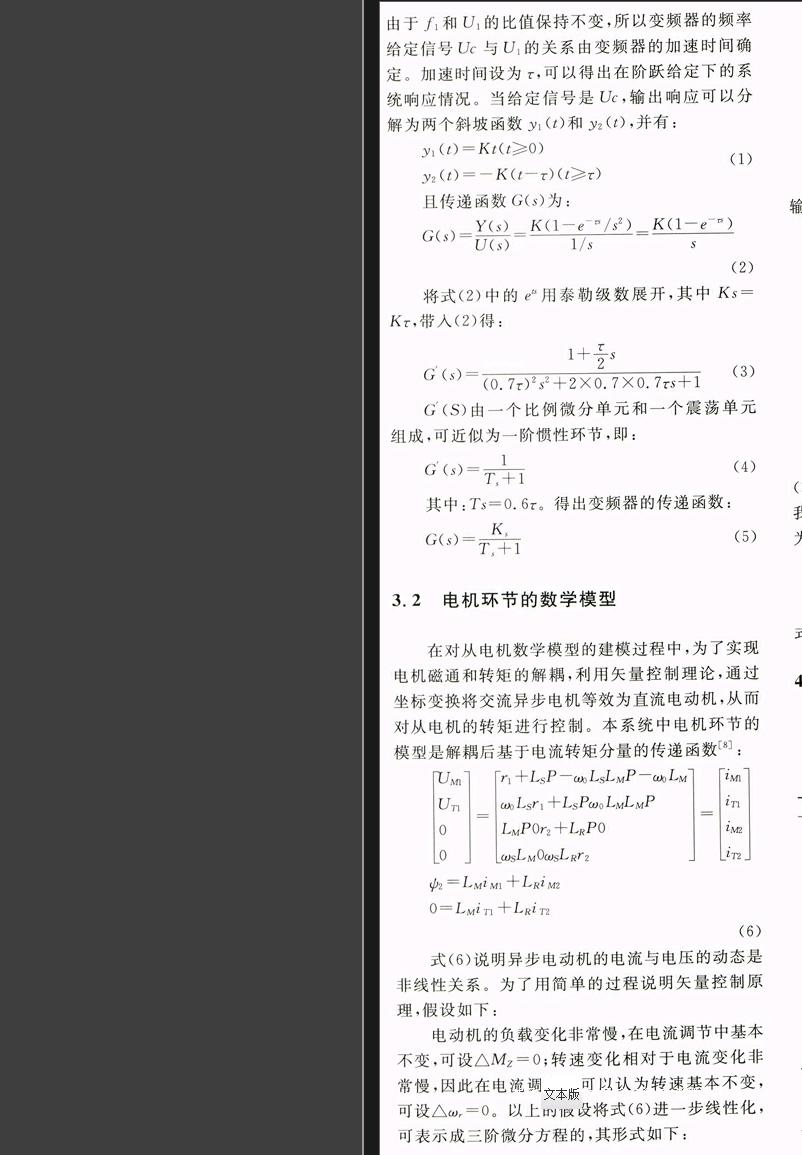
变频器的输入信号是控制电压Uc,通过变频器输出相应的电机定子相电压U1和电源频率f1。由于f1和U1的比值保持不变,所以变频器的频率给定信号Uc与U1的关系由变频器的加速时间确定。加速时间设为τ,可以得出在阶跃给定下的系统响应情况。当给定信号是Uc,输出响应可以分解为两个斜坡函数y1(t)和y2(t),并有:
3.2 电机环节的数学模型
在对从电机数学模型的建模过程中,为了实现电机磁通和转矩的解耦,利用矢量控制理论,通过坐标变换将交流异步电机等效为直流电动机,从而对从电机的转矩进行控制。本系统中电机环节的模型是解耦后基于电流转矩分量的传递函数[8]:
(6)
式(6)说明异步电动机的电流与电压的动态是非线性关系。为了用简单的过程说明矢量控制原理,假设如下:
电动机的负载变化非常慢,在电流调节中基本不变,可设△MZ=0;转速变化相对于电流变化非常慢,因此在电流调节中可以认为转速基本不变,可设△ωr=0。以上的假设将式(6)进一步线性化,可表示成三阶微分方程的,其形式如下:
可将它等效为直流电机电枢绕组回路方程,本式将作为转矩跟随控制的传递函数。
4 双电机同轴系统功率追踪算法的MATLAB仿真
选择主电机参数如表1所示:
表1 主电机的相关参数
为了使主从电机参数不同,这里设置从电机转子电阻为0.42Ω,其他参数均与主电机相同。根据上节建立的电动机环节数学模型及电机参数,可以得到电机的传递函数为:
4.1 基于模糊参数自整定PID控制系统的设计
根据主从电机参数及矢量控制原理解耦,其中主从电机间电压变化为4.5~5V,根据控制系统对过渡要求和专家经验,设计模糊PID控制器[9],建立模糊规则如图3所示:
图3 模糊控制器规则
对上述系统进行MATLAB仿真,仿真实验如图4所示:
图4 同轴从电机功率跟踪系统图
仿真时间设置为3s,设置主电机输入电流200A:仿真结果如图5所示:
图5 模糊PID功率追踪
由仿真结果可知,主电机输入200A电流,从电机电流经过0.5s达到主电机90%以上的输入,经1s达到误差为0,并且动态过程线性化程度较好。
4.2 基于迭代算法控制系统的设计