基于光散射法的粉尘浓度检测技术研究
2015-08-26 06:39赵政
电子设计工程 2015年24期
赵政
(中煤科工集团重庆研究院有限公司 重庆 400037)
粉尘浓度检测在矿山工业领域应用非常广泛,基于光散射法的粉尘浓度传感器由于直读式和可适应各种复杂的环境中而日益得到重视。 虽然这些设备已被广泛的应用,但仍然存在一些不足,主要体现在以下几个方面。 一是使用范围受到限制,由于传感器在复杂的环境中容易被污染,使得维护周期短和使用现场受到限制[1];另外维护过程复杂、清洁操作困难[2]。 二是测量结果易受被测环境的风速、湿度和温度等参数影响[3]。 三是多数此类传感器功耗高,测量精度低,可靠性差[4]。
本文针对上面提到的三点不足,做出了大量的改进使其能够用于恶劣的环境;同时采用特殊的测试光路机构使得其测量结果不受环境中风速、湿度和温度的影响;另外延长了对本传感器的维护时间,并使维护清洁操作简单。
本文通过对基于光散射法的粉尘浓度检测技术的研究,设计出一种粉尘浓度传感器,实现对粉尘浓度低功耗、高精度、高速度、高可靠性、高分辨率的检测。
1 粉尘浓度的光散射法检测基本原理
图1 所示的光散射法测量粉尘质量浓度的核心部件光学传感器的示意图[5]。 当粉尘通过光学传感器的光敏区时,颗粒会散射入射的激光, 在90°采光角方向放置一块旋转球面反射镜收集粉尘的散射光,再利用光电探测器将球面反射镜反射的散射光转换成电信号。 经前置放大、后续电路处理得到与粉尘颗粒散射光强相关的电压信号,然后通过对电压信号的数据处理和计算,就可以得出粉尘的质量浓度值。

图1 光散射法的粉尘浓度检测原理图Fig. 1 The diagram of dust concentration measurement technique based on the light scattering method
2 粉尘浓度检测技术的实现
基于光散射法的粉尘浓度传感器由测试光路机构和信号接收处理等部分组成。 试光路机构采用精密的激光技术和特殊的测试机构进行激光发射; 信号接收处理部分将获取的?V 级的散射光信号经过放大、滤波等处理后,使其变成工业仪表所能接收的标准电压、电流或脉冲信号,再经过接收处理,得到实时的粉尘浓度值,实现粉尘浓度值的显示、记录和运算。
2.1 总体方案
总体方案如图2 所示,包括测试光路机构和电路系统等部分[6]。 利用光散射法测量粉尘在光束中的散射光强,然后通过光电转换,测量出相应的电信号的大小,从而计算出空气中粉尘的质量浓度。 图2 所示是总体方案。

图2 总体方案Fig. 2 The scheme of overall design
2.2 测试光路机构
测试光路机构包括粉尘采集通道、光学测量结构和抽气风扇。
其中粉尘采集通道包括串联接通的进气通道和出气通道,而光学测量结构位于进气通道上方,当粉尘进入之后就发生光散射从而来测量器实时粉尘浓度;抽气风扇设置在粉尘出气通道的出气端,进气通道、出气通道均成水平串联布置,并在出气通道下端开口使粉尘自然沉降,减小污染程度。在进气口上方的最易污染的进气口上方开口进行观察和适当清理,使得粉尘首先经过出气口自然沉降,即使有污染亦可打开进气口上方开口进行清理, 使得清洁维护简单易行。其机构框图如图3 所示。
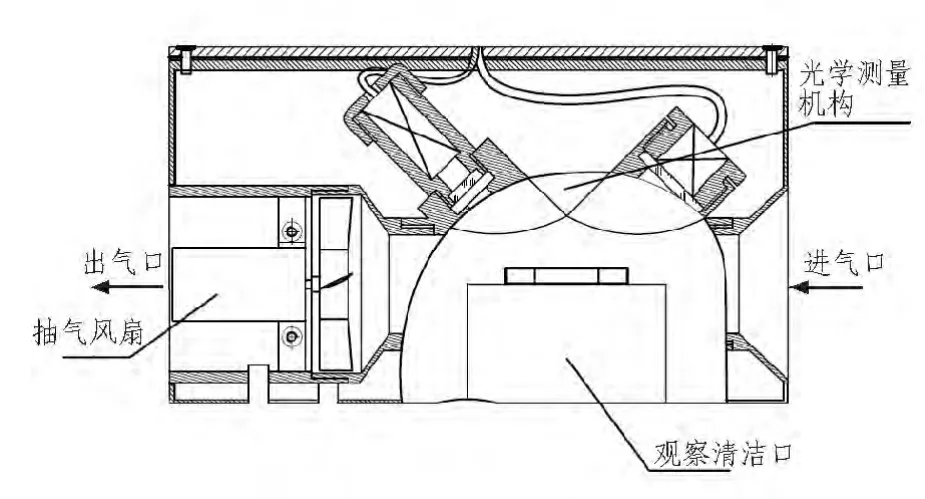
图3 测试光路机构Fig. 3 The mechanism of measuring light path
2.3 精密激光技术
本传感器中采用精密的激光管, 其波段选择为980 nm,避开可见光波段,不易受自然光的干扰[7]。 另外,激光管的光斑小、杂散光少、稳定性好、温漂小和整体绝缘能够适用于液体里等特点,使得其激光管的使用范围宽,适用于各种复杂的环境中,其激光管如下图4 所示。
3.4 光学测量结构
光学测量结构包括1 激光管、2 光敏二极管和3 气路三部分组成。激光管和光敏二极管的中心线成90°角度,当悬浮的粉尘通过气路时,激光管的光线就会发生散射,使得光敏二极管接收的光信号变强,就得到相应粉尘浓度值的光信号强度。 其测量结构如图5 所示。
3.5 信号接收处理电路

图4 激光管Fig. 4 The laser tube
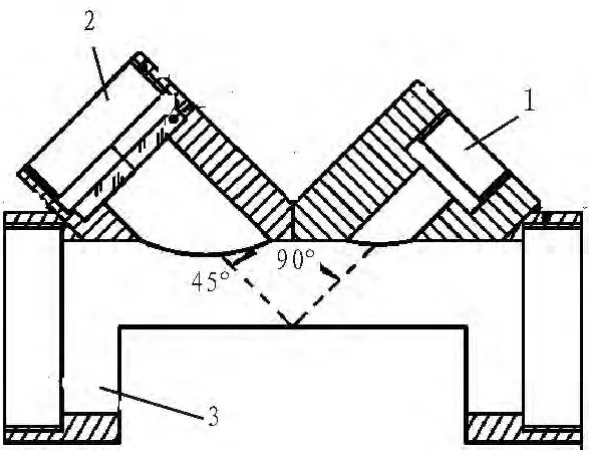
图5 光学测量结构Fig. 5 The measuring structure of optics
为了对光散射信号进行处理,需要将其放大和滤波。 由于信号是μV 级的电压微信号, 为了降低共模信号对其的干扰,满足偏置电流低、增益高、选择性好、频率响应好、低温漂和高带宽要求[8]。
根据以上要求, 采用有源运放进行信号放大和滤波,满足偏执电流低、低温漂和高带宽等要求。
经过一级放大之后,由于放大倍数不够,所以还需要对此信号进行放大,利用同相放大电路来放大经过一级放大滤波处理的信号,其处理过程如图6 所示。

图6 信号接收电路框图Fig. 6 The block diagram of signal receiving circuit
2.6 主控电路
主控电路作为整个系统的核心,负责将前面计时电路获得的时间换算成被测液体的实时流速,同时完成复杂时序控制、显示、存储。
在该系统中,由于有较多的控制时序。 如果单独采用一个微处理器既产生控制时序, 又负责测定数据的处理计算、显示、储存等;这样不仅影响了本系统控制时序的准确度,同时降低了其运算处理速度和精度。 因此在此选用两个微处理器ARM 芯片和CPLD。
相对于各种单片机,ARM 嵌入式芯片采用三级流水线技术处理,其处理速度快;嵌入式应用于工业控制、交通管理、信息家电、家庭智能管理系统、POS 网络及电子商务、环境工程与自然和机器人等行业, 有数字机床、 冰箱、 空调、iPad、iPhone、ATM 终端等产品;同时芯片功耗低、体积小、集成度高、成本低;由于众多的优点,在电子领域越来越得到用户的青睐,应用范围也在逐步的扩大。
本系统中选用PHILIPS 公司的ARM7 芯片LPC2132 作为核心处理器[9]。
在CPLD 家族中, 我们选用Altera 公司的MAXⅤ芯片,其具有编辑性强、操作简单、功耗低和速度快等特点,并且能够满足本系统的设计需求。
主控电路包括显示电路、复位电路、485 通讯电路、主频电路、数据存储电路、与CPLD 时序控制电路等。
具体工作原理如下:传感器将检测的信号转换成数字信号,经过标定、处理,进行显示、存储。 通讯采用RS485 方式,把粉尘浓度等其他参数上传至分站并经其送至地面控制中心,同时可接受来自地面控制中心的控制指令,对装置运行参数、模式进行修改。 另外将流量信号转换成200~1 000 Hz的频率信号输出。 其主控电路组成如图7 所示。
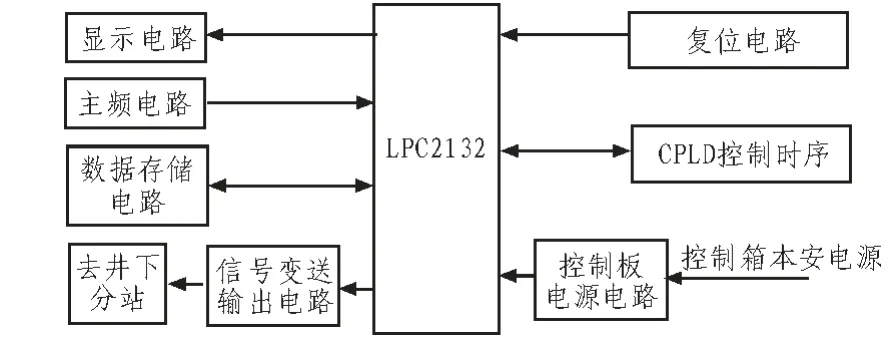
图7 主控电路框图Fig. 7 The block diagram of master control circuit
3 结构设计
为了适应各种高危和复杂的工业现场如煤矿井等场所,并应对易污染和难维护等缺点。
在此对传感器的外形和测试结构做了特殊的设计处理,使其能够适应于复杂的煤矿井下,并延长了维护时间和维护方式简单易行。 其结构示意图如图8 所示。 图中3 的开口可以将粉尘自然沉降。 若光路被污染首先可以直接对准气路冲水清洁,如果冲水清洁效果不显著,可以拧开图中1 处的螺钉,打开清洁窗口2 进行手工清洁,操作简单易行。

图8 传感器结构Fig. 8 The structure of sensor
4 实验测试
基于光散射法的粉尘浓度检测技术研究制成的粉尘浓度传感器样机, 在实验室发尘装置上以煤粉为测量介质,通过传统的采样器采样称重的方式进行精度对比试验。
样机与称重的质量浓度数据如表1 所示,样机相对误差小于±10%和重复性误差小于0.2%。
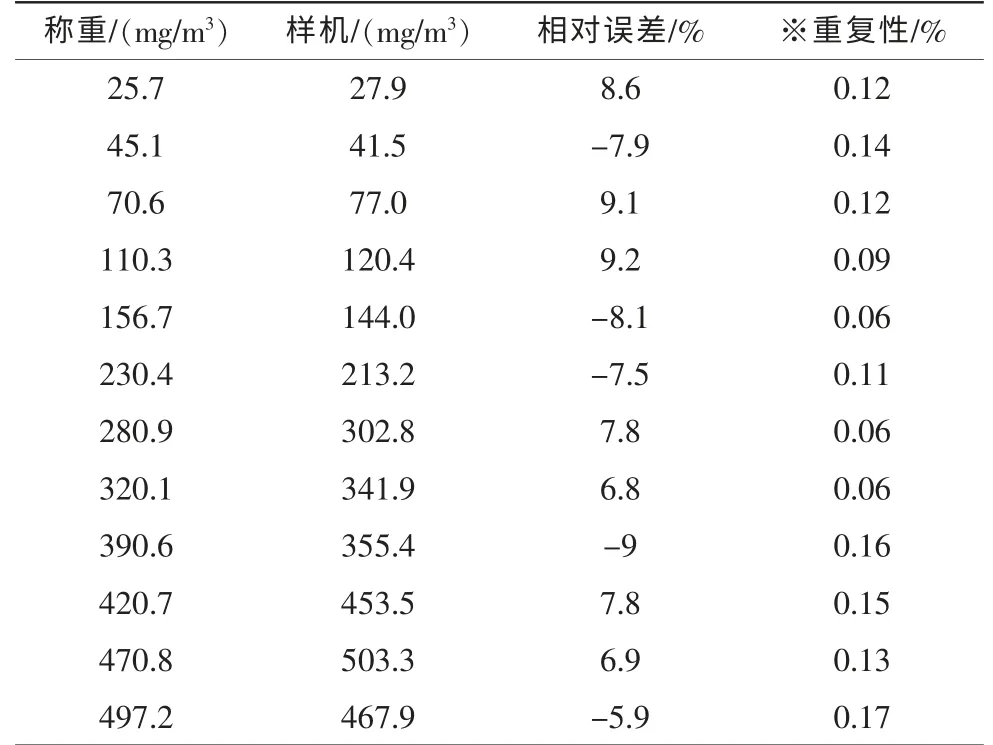
表1 样机与称重方式粉尘浓度试验数据表Tab. 1 The test data of dust dust concentration of model machine and weighing way
由以上对比实验得出,粉尘浓度传感器的精度、重复性和测量范围一直保持良好。
5 结 论
本文基于光散射法原理的粉尘浓度检测技术研究,设计实现的粉尘浓度传感器具有以下特点:
1)测量精度高,重复性误差小,通过实验测试得到本传感器的精度高达10%,重复性误差小于0.2%;
2)检测速度快、可靠性高,同时采用双核处理,其处理运算速度快;
3)特殊的结构设计,延长了维护时间,清洁操作过程简单易行。
[1] 田贻丽,谢利利,徐如瑜. 粉尘浓度测量的研究[J]. 重庆大学学报,2003,1(26):30-31.
[2] Cheng-Hsiung Huang,Chuen-Jinn Tsai. Influence of Impaction Plate Diameter and Particle Density on the Collection Efficiency of Round -Nuzzle Intertial Impactors [J].Aerosol Science and Technology,36:714-720,2002.
[3] Huang Z. An intelligent measurement system for powder flowrate measurement in pneumatic conveying system [J].IEEE Instrumentation and Measurement Technology Conference,2001,2:1237-1240.
[4] 戴昊. 光散射法粉尘仪的改进[D]. 南京:南京理工大学,2012.
[5] 李晓帆,刘天生,王鹏飞. 基于光散射测量原理的粉尘浓度检测仪的设计[J]. 机械管理开发,2009(6):61-62.
[6] 赵永林. 井下粉尘统计参数对粉尘检测的影响[J]. 煤炭学报,2005,20(5):203-206.
[7] 邹丽新,季晶晶,汤荣生. 基于光散射的小型便携式粉尘测量仪的研制[J]. 大气与环境光学学报,2008(5):355-361.
[8] 唐刚. 激光散射式煤矿粉尘测量仪的设计原理[J]. 测试技术学报,1996(10):555-558.
[9] 周立功,张华. 深入浅出ARM7[M]. 北京:北京航空航天出版社,2009.
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12
防爆电机(2021年6期)2022-01-17
纺织科学研究(2021年1期)2021-12-03
电子制作(2019年22期)2020-01-14
中学生数理化·中考版(2019年10期)2019-11-25
作文成功之路·小学版(2019年9期)2019-10-17
传媒评论(2019年5期)2019-08-30
时代英语·高一(2019年1期)2019-03-13
电子制作(2019年24期)2019-02-23
电子制作(2018年17期)2018-09-28