
FSAE赛车两种形式不等长双横臂独立悬架的运动位移比例建模仿真与对比研究
2015-08-19 09:24刘泽张新
汽车工程学报 2015年4期
刘泽++张新

摘 要:拉杆式与推杆式不等长双横臂独立悬架应用于大多数的FSAE赛车,赛车弹簧运动位移与车轮中心位移比例的大小不仅影响着其弹簧刚度的选取,同时影响着操纵稳定性。分别建立赛车左侧前悬架拉杆式与推杆式机构的物理模型,应用牛顿-辛普森方法进行悬架几何运动分析,并通过运动学仿真分析探索较精确地获得该比例大小的方法,之后对两种机构形式求得的该比例变化趋势进行对比分析,求取它们的等效刚度并得出推杆式可得到更大的等效刚度的结论,为FSAE赛车悬架系统设计提供了有益的建议。
关键词:FSAE赛车;不等长双横臂独立悬架;仿真与对比;运动比例位移
中图分类号:U462.1 文献标识码:A
Model Simulation and Comparative Study for the Motion Ratio of Unequal Double-Arm Suspension from a FSAE Racing Car
Liu Ze1,2, Zhang Xin1,2
(1.School of Vehicle and Mechanical Engineering, Changsha University of Science & Technology, ,Changsha 410114,Hunan,China;2.Key Laboratory of Safety Design and Reliability Technology for Engineering Vehicle, Changsha, 410114, Hunan Province_410000,,China)
Abstract:Almost every FSAE racing car applies pullrod and pushrod unequal double-arm suspension. The motion ratio between spring and wheel center effects the calculation of the spring stiffness, also effect the ride and roll of the race car. Built the physical model of the pullrod and pushrod suspension at the left front wheel, used Newton-Raphson method to analysis the kinematics of suspension geometry. And got the method which calculated the motion ratio correctly by kinematics simulation analysis. Also compared and analyzed the trend of the motion ratio curve, than calculated the effective stiffness of pullrod and pushrod, and finally got the pushrod had larger effective stiffness. Provide some useful suggestions for the suspension system design.
Key words:FSAE racing car; unequal double-arm suspension; simulation and comparison; motion ratio
引 言
FSAE赛车为是针对中国大学生方程式汽车大赛的比赛用车,大赛要求该赛车应具备良好的操纵稳定性以满足比赛安全与需要。这类赛车采用的前悬架形式大都为不等长双横臂独立悬架,原因在于该种悬架它有较大的设计自由度,可以获得想要的赛车性能。【[1]】。该这种悬架可以根据需要调整赛车静态时侧倾中心的位置,并且减少赛车侧倾时受载车轮的正外倾角,使轮胎与地面接触更加充分,提高赛车的操纵稳定性。【[2]】。通常这类赛车会在悬架横臂与减振震器之间加装推拉杆和摇臂结构进行连接,一般有推杆式、拉杆式和无推拉杆式三种连接方式,这三种连接方式也有各自的优缺点。【[3]】。由于赛车选用的减震振器最大行程为270 mm,且大赛规则要求车轮必须具备上跳和下跳至少25.4 mm的能力。【[4]】,为保证赛车符合规则且具备良好的操纵稳定性,设定一个合适的弹簧运动位移与车轮中心位移比例十分重要。国内FSAE赛事起步较晚,而该类赛车悬架设计方面的文献较少,得到此比例的方法仅停留在经验选择的基础上,所以如何应用科学的方法计算、选择并确定合适的运动位移比例对于出色的赛车悬架设计很重要。本文提出了一种能够得到该运动位移比例的数学建模方法,并对两种不同悬架形式的该比例变化情况进行对比,旨在为国内各个FSAE赛车队的悬架设计提供帮助。
1 原理分析
图1.1 拉杆式不等长双横臂独立悬架结构示意图
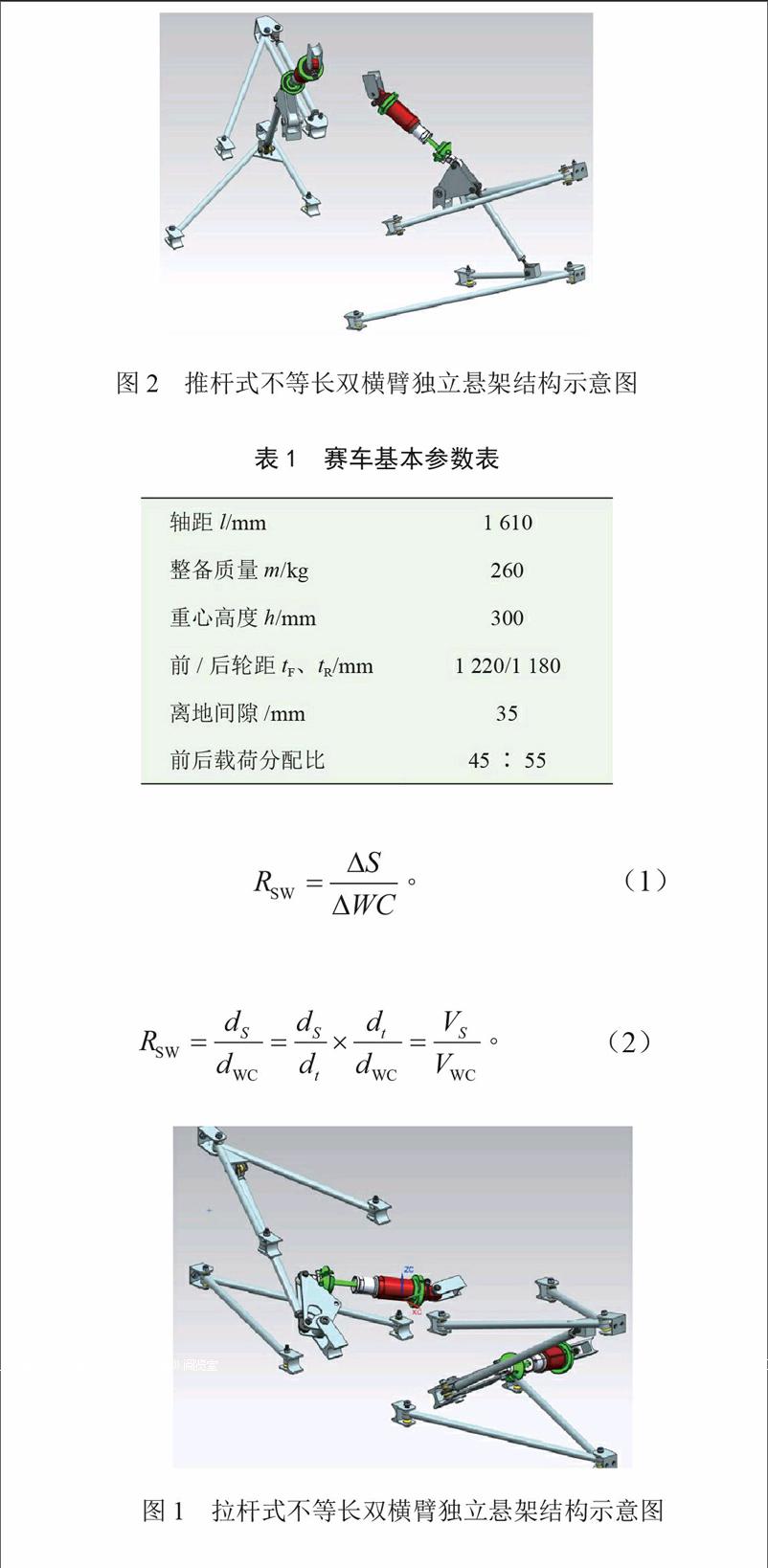
图1.12 推杆式不等长双横臂独立悬架结构示意图
所研究的两种悬架形式结构图如图1和2所示,并应用于某型FSAE赛车,其基本参数见表1。
所研究的两种悬架形式结构图如图1.1和1.2所示,并应用于某型FSAE赛车,其基本参数如见表1所示:。
表1 赛车基本参数表
轴距 写出量符号l/mm 1 610mm 前/后轮距 写出量符号/mm 1 220mm/1 180mm
整备质量m/kg 260kg 离地间隙 写出量符号RH/mm 35mm
重心高度h/mm 300mm 前后载荷分配比 45:55
弹簧运动位移与车轮中心位移比例,顾名思义就是车轮在上下弹跳时悬架弹簧的运动位移与车轮中心弹跳位移之比,如公式(1-1)所示。
。 (1-1)
式中:, 为弹簧运动位移,单位m;
为车轮中心弹跳位移,单位m;
为弹簧与车轮中心的位移比例,无量纲;。
但由于 在车轮跳动时不可能是线性的,故 和 不能取太大,否则影响 的精确程度。如果 趋近于0,则公式(1-1)可化为导数形式。通过添加对时间的导数 , 可化为弹簧的运动速度与车轮中心运动速度的比值,如式(1-2)所示。
。 (1-2)
式中:, 为弹簧运动速度,单位m/s;
为车轮中心运动速度,单位m/s;。
如果单独将前轴或后轴一侧双横臂独立悬架和车轮作为一个系统,则可将车轮、横臂、推拉杆、摇臂、减震振器等作为子系统。这样来看,车轮中心运动势必会引起其他它子系统的运动。令 为横臂与推拉杆连接点的运动位移,可建立 与 的关系,同时推出 可由 与 得到,如式(1-3)所示。
。 (1-3)
式中:, 为横臂与推拉杆连接点运动速度,单位m/s;
为弹簧与连接点的位移比例,无量纲;
为连接点与车轮中心的位移比例,无量纲;。
进而可知若展开到每一个子系统,则 可由式(1-4)表示。
。 (1-4)
这样看来我们可以通过对各子系统进行运动学分析,对 进行进一步求解。
2 建模与仿真
根据FSAE赛车悬架结构以及上述计算原理来看,若要建立车轮中心弹跳位移与弹簧变化位移之间的关系,就必须先建立连接车轮与弹簧之中其他它子系统之间的关系。故需要建立的中间关系比例有车轮中心弹跳位移与推拉杆摇臂连接点运动位移比例和推拉杆摇臂连接点运动位移与摇臂减震振器连接点运动位移比例。以下分析都以前轴左侧车轮为例。
2.1拉杆式不等长双横臂独立悬架
2.1.1 车轮中心弹跳位移与推拉杆摇臂连接点运动位移比例
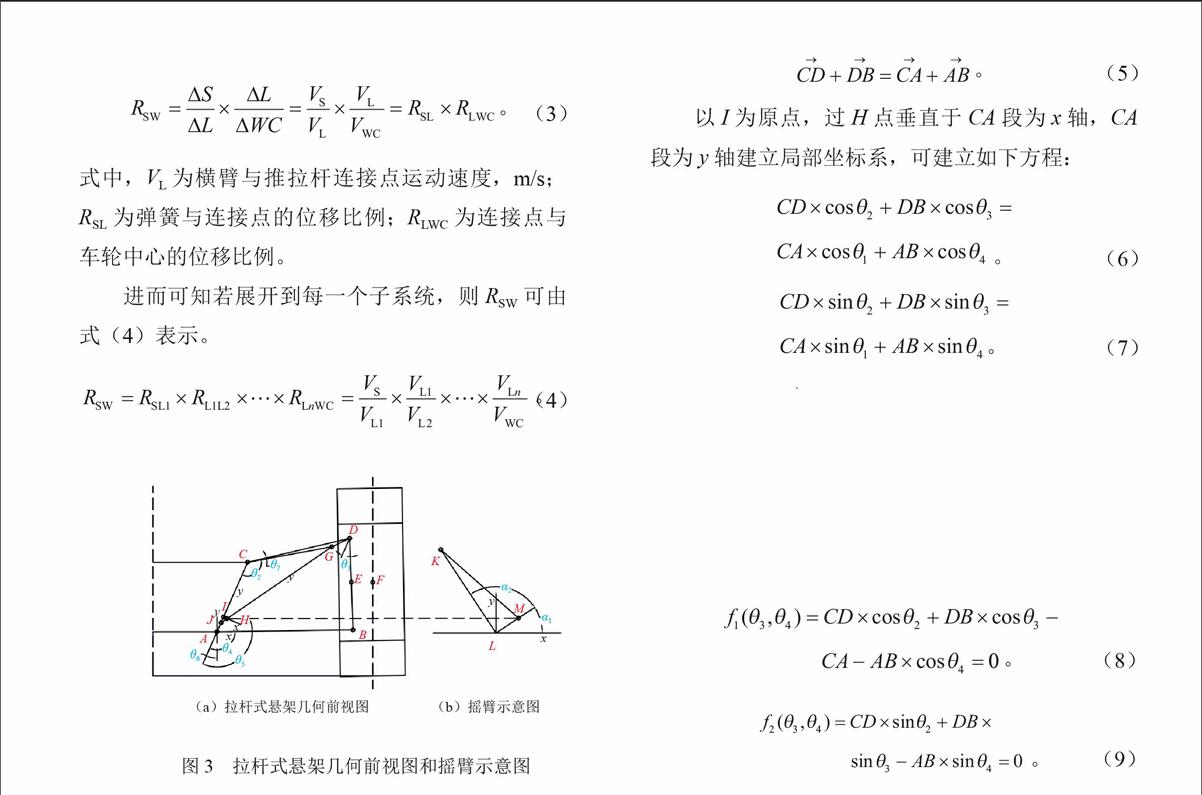
依据拉杆式不等长双横臂独立悬架结构,如图2.13(1a)中,可以看出上横臂CD、下横臂AB、上下横臂车架连接距离CA以及主销DB构成一个四连杆结构,其中CA段为固定端,CD、AB与DB段为运动端。HG段为拉杆长度。EF段为主销中心到车轮中心距离。I点为一参考坐标系的原点。J点为HG延长线与AC的交点。图2.1(2)为摇臂示意图,L点为摇臂与车架连接点,M点为拉杆与摇臂连接点(与H点相对应),K点为摇臂与阻尼连接点。拉杆式摇臂一般连接于车辆坐标系纵向方向平行的钢管上[5]。【5】
图 2.13 (1a)为拉杆式悬架几何前视图 (2b)为摇臂示意图
图3 拉杆式悬架几何前视图和摇臂示意图
令CD段为输入端,可建立该悬架四杆结构的位移矢量公式(2-15)。
。 (2-15)
以I为原点,过H点垂直于CA段为x轴,CA段为y轴建立局部坐标系,可建立如下方程:
。 (2-26)
。 (2-37)
由于矢量 与y轴相重合,故夹角 恒为0°,其他它角度可由图2.13(1a)得到。
通过式(2-15)与和式(2-26)可以看出,若给定四4个位移矢量和 的大小,则可求 和 的大小,但以上方程组为求解这两个角度的非线性超越方程,就变得很难求。所以这里采用牛顿-辛普森方法进行求解,对于该方法详尽的描述可在参考文献【6】[6]和【[7]】中找到。取图2.13中I点为原点的坐标系为参考系,对式(2-26)与和式(2-37)进行重新组合化成式(2-48)和式(2-59)的形式。
。 (2-48)
。 (2-59)
将变量 和 表达为预估值 和 与修正因子 和 之和的形式,如式(2-610)和~(2-711)所示。
。 (2-610)
。 (2-711)
通过牛顿-辛普森方法中的泰勒级数推导,可得到如下矩阵形式:
. (2-812)
所有公式中矩阵的量符号请全部改为粗黑体。
通过Matlab建立该牛顿-辛普森迭代方法的程序,流程如下:
(1)设定预估值 和 ;。
(2)由预估值 和 通过式(2-812)求解修正因子 和 ;。
(3)原预估值加上修正因子求解新的预估值,即式(2-610)和(2-711);。
(4)通过式(2-48)和式(2-59)重新计算函数值 和 ;。
(5)如果 和 接近0则得到所需解,计算结束,否则返回第二步。
通过该方法即可求出以 做小步长变化, 、 和 的大小,如图2.24所示,可以看
出 、 和 三个角度是随着 的增长而增长。
图 2.24 、 和 随 变化的变化图像
请添加纵坐标“输出角度”的量符号
由图2.13(1a)可知,以A为圆心的坐标系,车轮中心点F运动的垂直位移即为此时E点在y轴的投影距离与静止状态下该点在y轴的投影距离之差,即为式(2-913)所示:
。 (2-913)
这样我们就建立了输入量 与车轮中心跳动的关系,如图2-35所示,可以看出 角度变化增长对应悬架上跳的情况,并与车轮中心跳动位移成正比,且车轮最大跳动位移满足上跳至少25.4 mm的大赛规则要求。
图2.35 输入量 与车轮中心跳动的关系
为了进一步求解车轮中心弹跳位移与拉杆摇臂连接点运动位移之间的关系,根据图2.13(1a),以点I为原点的坐标系,角度 为恒定值,杆件长度已知,可求出点G坐标,如式(2-1014)和式(2-1115)所示。拉杆摇臂连接点H的运动可看成滑块沿特定轨道移动,故可建立H点运动轨迹的一个一元一次方程,如式(2-1216)所示。
。 (2-1014)
。 (2-1115)
。 (2-1216)
不管H点和G点如何运动,这两个点之间的距离在图2.13(1a)以I为原点的坐标系中永远是拉杆的长度,如式(2-1317)所示。由于拉杆长 已知,将式(2-1014)、(2-1115)和(2-1216)带入式(2-1317),从而可带入出不同的 进而求解H点的坐标,即可知拉杆摇臂运动位移的变化量。
。 (2-1317)
求出的车轮中心弹跳位移与拉杆摇臂连接点运动位移比例变化图像如图2.56红色线所示。
2.1.2 拉杆摇臂连接点运动位移与摇臂减震振器连接点运动位移比例
在赛车设计中,摇臂作为赛车悬架系统的一部分起到连接悬架杆件与减震振器的重要作用。通过摇臂,不仅可以按照实际需要改变减震器的安装位置,如车架上方横向对称布置,车架两侧纵向布置等,还可以通过改变摇臂结构实现改变运动位移的比例,从而适应不同的设计需求。
首先建立如图2.13(2b)原点为点L的坐标系。在摇臂运动过程中,M点纵坐标的位移增量为上一节求得的拉杆摇臂连接点H在原点为I坐标系中的位移增量,且M点的运动轨迹为以LM为半径,点L为原点的圆,轨迹公式见式(2-1418)。
。 (2-1418)
令LK长度二倍于LM, 是LM与车辆纵轴的夹角,LK与LM的夹角 为在进行布置时即确定的已知量。故可应用公式(2-1519),(2-16)和~(2-1721)求解点K的坐标。
。 (2-1519)
。 (2-1620)
。 (2-1721)
通过进一步计算K点与M点的运动位移,可得到摇臂减震振器连接点(K点)运动位移与拉杆摇臂连接点运动位移(M点)之比等于摇臂长端(LK)长度与短端(LM)长度之比。
将上两节所求比例相乘即为车轮中心位移与弹簧运动位移比例,如图2.67红色线所示。
2.2 推杆式不等长双横臂独立悬架
2.2.1 车轮中心弹跳位移与推杆摇臂连接点运动位移比例
依据推杆式双横臂独立悬架结构,如图2.48(1a),可以看出与上一节拉杆式结构有明显的不同,在于推杆HG与悬架的铰接点G在下横臂,推杆摇臂上置,其他它结构一致。图2.48(2b)为摇臂示意图,L点为摇臂与车架连接点(与I点相对应),M点为拉杆与摇臂连接点(与H点相对应),K点为摇臂与阻尼连接点。推杆式摇臂布置方向一般与车辆坐标系横向方向平行。【[8]】。
图2.4 (1)为推杆式悬架几何前视图 (2)为摇臂示意图
图8 推杆式悬架几何前视图和摇臂示意图
同样的通过牛顿-辛普森迭代法,让 做小步长变化,求得 、 和 的大小,并且以点A为原点的坐标系求解输入量 与车轮中心跳动的关系。
依然以该坐标系为参考坐标系,用之前求得的 对G点坐标进行求解。由于推杆长度已知进而可求出推杆与摇臂铰接点H的坐标。这样就可以得到如图2.56黑色线所示车轮中心弹跳运动位移与推杆摇臂连接点位移比例的变化图像。
2.2.2 推杆摇臂连接点运动位移与摇臂减震振器连接点运动位移比例
本节中摇臂采用上置式,且与车辆坐标系纵轴成90°布置。建立如图2.48(2b)中原点为点L的坐标系,M点横坐标与纵坐标位置为上一节求得的推杆摇臂连接点H通过坐标变换即可得到。应用2.1.2节同样的方法即可求得推杆摇臂连接点运动位移与摇臂减震振器连接点运动位移比例。该比例与摇臂输出边长度和输入边长度之比相等。将该比例与上一节所求比例相乘即为车轮中心位移与弹簧运动位移比例,如图2.67黑色线所示。
C
图2.56 输入量 与所求比例的关系
图2.67 输入量 与所求比例的关系
3 上述两种结构所求比例对比分析
通过上述两种结构最终求得的弹簧运动位移与车轮中心位移比例图像可知,拉杆式不等长双横臂独立悬架其所求比例会随着车轮上跳幅度的增加而减小,而推杆式则恰恰相反。现在需要来判断一下推杆式和拉杆式哪种方式更好。
弹簧分为线性弹簧与非线性弹簧两种,线性与非线性是指弹簧刚度是否恒定。假定使用的是线性弹簧且运动比例恒为 ,这里我们定义在车轮中心的等效弹簧力为 ,实际弹簧力为 ,见公式(2-1822)。
。 (2-1822)
再定义等效弹簧刚度 与实际弹簧刚度 之间的关系,见公式(2-1923)。
。 (2-1923)
式中:, 为弹簧运动位移积分量, 单位m;
为车轮中心弹跳位移积分量, 单位m;。
通过上式(23)可以看出对于线性弹簧等效弹簧刚度的大小取决于 。对于 恒定的非线性弹簧来说,我们可以建立式(2-2024)。
。 (2-2024)
故可知等效弹簧刚度与实际弹簧刚度并不受弹簧是线性还是非线性的影响。现在考虑 数值是变化的情况,实际上也是如此,可建立式(2-2125)。
。 (2-2125)
通过上式(25)可知,若 大小随车轮弹跳成正比,故 为正,这时的等效弹簧刚度一定会比 大小随车轮弹跳成反比要大,也就是说推杆式悬架能够得到比拉杆式悬架更大的等效弹簧刚度。
4 结论
(1)通过对拉杆式与推杆式不等长双横臂独立悬架的弹簧运动位移与车轮中心位移比例进行建模仿真,得到了一个求解在悬架运动过程中该比例数值较有效地的建模方法。
(2)通过对拉杆式与推杆式该比例的图像进行对比,得知拉杆式时该比例为随车轮中心上跳而有下降的趋势,推杆式恰恰相反。
(3)通过不同条件下不等长双横臂独立悬架的等效弹簧刚度的计算,可知推杆式能够获得更大的等效弹簧刚度,建议在FSAE赛车悬架设计中使用推杆式不等长双横臂独立悬架。
参考文献
[1] MILLIKEN W F, MILLIKEN D L. Race Car Vehicle Dynamics [M].Warrendale::SAE, 1995.
[2] Carroll SMITH C. Tune to Win [M].[S.l]:Aeropublishers, INC. ,1978.
[3] 吴健瑜. 大学生方程式赛车悬架设计及优化研究 [DN]. 广州: 华南理工大学, 2011.
Wu Jian-yu. Suspension Design and Optimization of Formula SAE Racing
Car [ND]. Guangzhou: South China University of Technology, 2011.(in Chinese)
[4] 大学生方程式汽车大赛组委会. 2014年中国大学生方程式汽车大赛规则 [RM]. 北京: 中国汽车工程会, 2014.
Committee of Formula Student China. The Competition Rules of Formula Student China
in 2014[R]. Beijing: SAE-China, 2014.(in Chinese)
[5]倪俊,徐彬. 基于ADAMS的FSAE赛车建模与操纵稳定性仿真 [J]. 工程设计学报,2011,018(5): 354-358.
Ni Jun, Xu Bin. Modeling and Handling Stability Simulation of a FSAE Racing Car Based on ADAMS [J].Chinese Journal of Engineering Design, 2011,018(5): 354-358.(in Chinese)
[6]刘龙,黎炯宏. 基于MATLAB的平面四连杆机构运动仿真 [J]. 机电工程技术, 2011,04 40(4): 51-52+,84+,112.
Liu Long,Li Jiong-hong. Motion Analysis of Four-Bar Plane Linkage Using MATLAB
Software [J]. Mechanical & Electrical Engineering Technology, 2011,0440(4): 51-52+,84+,112. (in Chinese)
[7]王锡霖,,严日明,,李举,,许文艺等. 基于MATLAB的平面五连杆机构的运动学分析 [J]. 长春工业大学学报(自然科学版), 2011, 32(03): 273-277.
Wang Xi-lin, Yan Ri-ming, Li Ju, XU Wen-yiet al. Kinematic Analysis of Planar Five-Bar Mechanism Based on MATLAB [J]. Journal of Changchun University of Technology(Natural Science Edition), 2011, 32(03): 273-277.(in Chinese)
[8]吴健瑜, 罗玉涛, 黄向东. FSAE赛车双横臂悬架优化设计 [J]. 机械设计与制造,2011,(10): 120-122.
Wu Jian-yu, Luo Yu-tao, Huang Xiang-dong. Optimization of Double-Wishbone Independent Suspension for FSAE Racing Car [J]. Machinery Design & Manufacture, 2011,(10): 120-122.(in Chinese)
作者简介:
责任作者:
张新(1966-),,男,(汉族),湖南长沙人。教授,,博士,,2000年中南大学毕业,主要
从事汽车主动安全控制技术研究。Tel:731-85258638,E-mail:zxxbzjy@sina.com
通讯作者:
刘泽(1990-),男,黑龙江省大庆市人,2013级硕士研究生,主要从事汽车底盘动力学研究。Tel:13875860557,E-mail:autoliuze@126.com
基金项目:2014年湖南省研究生科研创新项目资助(CX2014B378)
通讯地址:湖南省长沙市雨花区长沙理工大学云塘校区机械工程训练中心
邮编:410000
收件人:刘泽
