三相永磁同步电机正弦波供电直接起动研究
2015-08-09 02:29张金辉
河南科技 2015年12期
张金辉
(河南工业和信息化职业学院,河南 焦作 454001)
本文对工频电网正弦电压供电下电力系统中的PMSM 模块和分离模块构成的PMSM 直接起动过程进行分析,并对其仿真模型进行验证。
根据PMSM 的dq 轴数学模型,可以看出系统为多输入多输出系统。由于Te 与idiq 的乘积有关,系统是非线性的。虽然Simulink 的模块库—连续(Continuous)模块子目录中有传递函数(Transfer Fcn)和状态空间方程(State-Space)模块,可用来方便地搭建线性多输入多输出系统,但却不适用于这里。
使用Simulink 模块库信号连接(Signal Routing)子目录下的信号跳转(Goto)模块和信号接收(From)模块进行信号的传递。整个模型分为4个区域:输入部分、输出部分、计算部分和电动机参数输入部分。计算部分包括5个子系统:wr 计算子系统(calculate wr),θ计算子系统(calculateθ),id计算子系统(calculate id),Te计算子系统(calculate Te),iq计算子系统(calculate iq)[1]。
建立仿真模型时,需要注意以下两点:
①模块中多次使用Goto 模块,如:输入部分使用的ud,uq 及tl 模块。必须要把Goto 模块默认的local 作用范围改为global作用范围,以便其他区域可以对该参数进行调用,否则其他区域的from 模块得到的只能是0,从而导致运算错误。
②电动机参数输入部分的常数参数部分需要设置为:[L R psi_f IFP(3)IFP(1)IFP(2)]。其中,L为电机的直轴电感和交轴电感,L=[Ld Lq],R 为电机的定子相电阻,psi_f 为电机的永磁磁链,IFP(3)为电机的极对数,IFP(1)为电机的转动惯量,IFP(2)为电机的摩擦因数。
运用Matlab/Simulink 建立的仿真模型,电动机的内部参数采用以下设置,电动机参数输入部分的常数参数部分需要设置为:[L R psi_f IFP(3)IFP(1)IFP(2)][2]。其中,L为电机的直轴电感和交轴电感,L=[Ld Lq],R为电机的定子相电阻,psi_f为电机的永磁磁链,IFP(3)为电机的极对数,IFP(1)为电机的转动惯量,IFP(2)为电机的摩擦因数。
其额定输出转矩设置为3N·m。外加正弦波电压的有效值为220V,频率为50HZ,该频率在正弦波模块参数设置对话框里设置为100π(rad/s)。各仿真程序设置如下:
1 使用电力系统中的PMSM模块构成的仿真模型
仿真程序如图1 所示,在仿真参数(Simulation Parameters)设置对话框中,设置仿真起始时间为0.0s,仿真停止时间为0.2s。由于系统中含有非线性因素,故微分方程解法选用可变步长,解算器种类为ode45s,最大时间步长设置为1e-5,其他可保持为默认值。
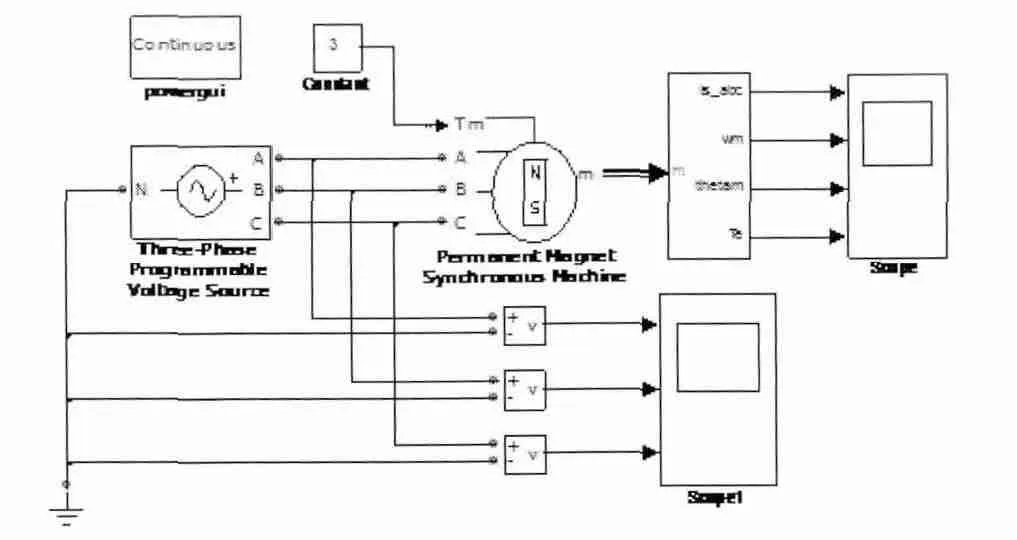
图1 基于电力系统库PMSM模型的仿真模型
由于本仿真模型使用的是Sim Power Systems库中的PMSM 模块,故不能直接用Simulink 中的正弦波模块供电。在此,使用Sim Power Systems 库的三相绕组三相组合电压源为电机供电,设置与上述外加正弦波电压要求相同,作为三相PMSM 模块的输入。负载转矩使用常数模块,设定值为3N·m。输出的各项用PMSM电动机的测试分解模块(Machines Measurement Demux)输出到示波器进行观察。运行仿真,用示波器观察各项的输出值。并记录转子机械角速度的波形,如下图3(a)所示。
2 使用分离模块构建的PMSM模块构成的仿真模型
系统模型的仿真程序如图2所示,在此,分离模块都是由Simulink 中的模块组成的子系统,三相绕组的相电压可用正弦波模块输出,其他设置参数与上述电力系统库仿真参数相同。

图2 基于分离模块PMSM模型的仿真模型
运行仿真,用示波器观察各项的输出值,并记录转子机械角速度的波形,如下图3(b)所示。

图3 正弦波供电PMSM起动转子机械角速度图
通过仿真,我们根据输出波形可以得出结论,当工频电网供电时,在电机起动前期,电动机转速有很大振荡,不过最终还是可以稳定运行在同步机械角速度79rad/s(≈50×2π/4)。这是因为电动机的转动惯量很小,转子速度可以较快地跟随同步速度,如果是惯量较大的电动机就不能顺利起动了。另外,还可以看出,即便电动机可以起动,但是起动过程中,速度存在很大的振荡,转子转速开始和定子磁场不再一致,存在着一定程度的失步现象。为了获得更好的起动性能,必须在转子上加入阻尼绕组,形成异步起动同步电动机;或者采用变频起动。而变频启动具有多种控制及节能优势,成为未来发展的必然趋势。
[1]Lijun Hou,Yanmin Su,Lin Chen.DSP-Based Indirect Rotor Field Oriented Control for Multiphase Induction Machines[J].IEMDC of IEEE,2003(2):976-980.
[2]戴勇,解锦辉.十二相同步电动机的数学模型及仿真[J].船电技术,2004(2):5-8.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
四川工商学院学术新视野(2021年2期)2021-11-02
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
铁道通信信号(2020年3期)2020-09-21
电子制作(2019年7期)2019-04-25
铁道通信信号(2018年8期)2018-11-10
中国新通信(2016年22期)2017-01-13
智能建筑电气技术(2015年5期)2015-12-10
智能建筑电气技术(2015年5期)2015-12-10