高原自适应型液压挖掘机的控制研究
2015-08-02 08:22合WENJunYANGShuaiZHANGHe徐工挖掘机械有限公司江苏徐州221004
建筑机械化 2015年4期
文 俊,杨 帅,张 合WEN Jun, YANG Shuai, ZHANG He(徐工挖掘机械有限公司,江苏 徐州 221004)
产品·技术 Product.Technology
高原自适应型液压挖掘机的控制研究
文 俊,杨 帅,张 合
WEN Jun, YANG Shuai, ZHANG He
(徐工挖掘机械有限公司,江苏 徐州 221004)
[摘 要]介绍了通过GPS模块检测海拔高度,并通过总线将海拔高度传输到主控制器,主控制器根据存储的发动机功率与海拔高度的对应关系,自动调节液压系统的吸收功率,从而实现发动机系统和液压系统的自动匹配,避免因为负载过大导致发动机憋车、冒黑烟等高原问题。
[关键词]挖掘机;控制研究;高原自适应;匹配
我国地域辽阔,是世界上高原面积占有率最大的国家,海拔1 000~2 000m的高原面积占国土面积的25%,2 000~3 000m的高原面积占7%,3 000m以上占26%,其中云贵、青藏、帕米尔高原面积总计2.7×106km2,平均海拔在2 000~4 500m,并呈现西高东低的趋势。在我国矿产资源分布中又呈现西富东贫的特点,伴随着国家西部大开发战略的不断推进,西部高海拔地区对挖掘机的需求量越来越大。
但随着海拔高度的不断上升,大气密度逐渐降低,一般来说海拔高度每上升1 000m,大气密度将降低8%~9%,海拔在4 000m以上时大气密度下降幅度更大,发动机功率将出现较大幅度的衰减。
挖掘机发动机输出功率与液压系统的功率可以用以下公式来表示:
PF=PY+ΔP (1)
式中 PF—发动机输出功率;
PY—液压系统功率;
ΔP— 其他部分功率,包括风扇、压缩机、发电机等附件的功率以及系统的功率富余
在此,我们可以假设ΔP是一个恒定值,而发动机输出功率是一个关于海拔高度的函数,即
PF=f (H) (2)
式中 H—海拔高度。
由于海拔上升,发动机输出功率PF减少,液压系统和发动机系统功率将不再匹配,出现由于液压系统过载导致发动机憋车等动力性能下降问题,此外由于燃料燃烧不充分,发动机冒黑烟,整机油耗高等一系列高原问题也将出现。
为了保证在海拔高度发生变化的情况下,液压系统和发动机系统功率仍然匹配,就必须对液压系统功率进行调整。由式1和式2可得,液压系统的功率也将是一个关于海拔高度的函数,即
PY=f'(H) (3)
由式3可得,当挖掘机在高原施工时,就可以根据施工地区海拔高度调节主泵功率到对应值,实现发动机和液压系统的匹配。
图1为主泵的PQ曲线,其中曲线1的功率为PY1,曲线2的功率为PY2,主泵功率的改变可以通过改变比例电磁阀电流来实现。
根据发动机在高原地区工作时功率与海拔的关系,制造厂一般会在挖掘机销售前根据工地的海拔高度手动调节主泵比例电磁阀的电流,改变主泵功率,实现发动机和液压系统的功率匹配。但这种方法有一个弊端,就是当挖掘机转场海拔高度出现变化时,由于用户没有权限设置系统参数,就会再次导致系统不匹配问题。
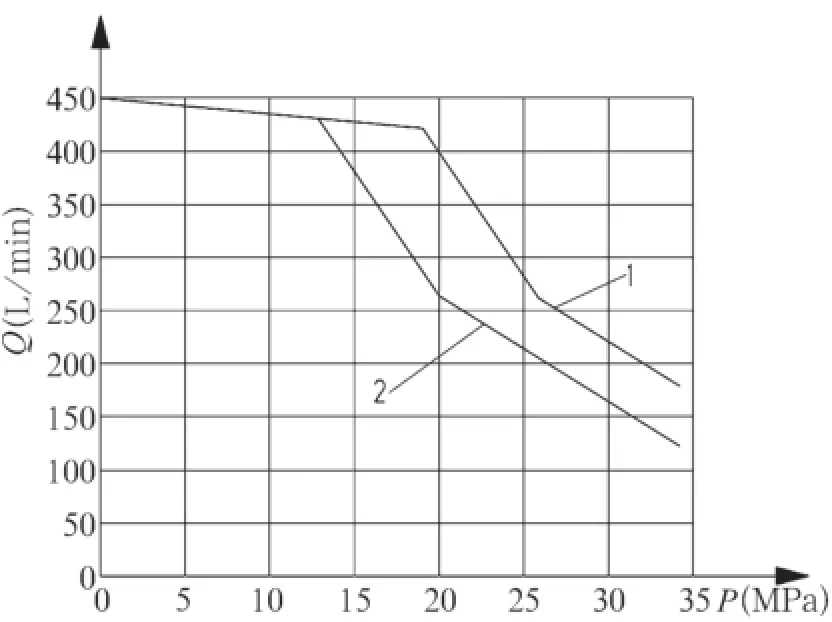
图1 主泵PQ曲线
为了解决这个问题,液压系统功率就必须能够根据所在地区的海拔高度自动调节,目前很多挖掘机上安装了GPS模块,所以可以结合GPS模块和主控制器实现对液压系统功率的调节,从而实现液压系统和发动机的自动匹配,解决了发车时需要人为设置或者转场时客户无法设置的问题。该控制方法的原理如图2所示。
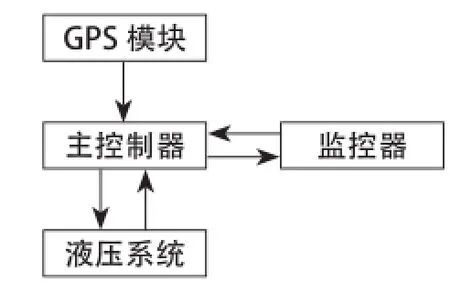
图2 控制原理图
实现这一功能的原理是:挖掘机通电后,GPS模块自动检测挖掘机所在地区的海拔高度,将海拔高度传输给挖掘机主控制器,主控制器判断挖掘机所在位置是否在发动机的功率衰减区,如果在衰减区,则监控器提示是否执行高原模式,通过人机交换平台选择执行高原模式,此时主控制器根据式3主泵功率与海拔高度的关系调节主泵功率,从而实现液压系统与发动机系统的完美匹配。
该功能的控制流程如图3所示。
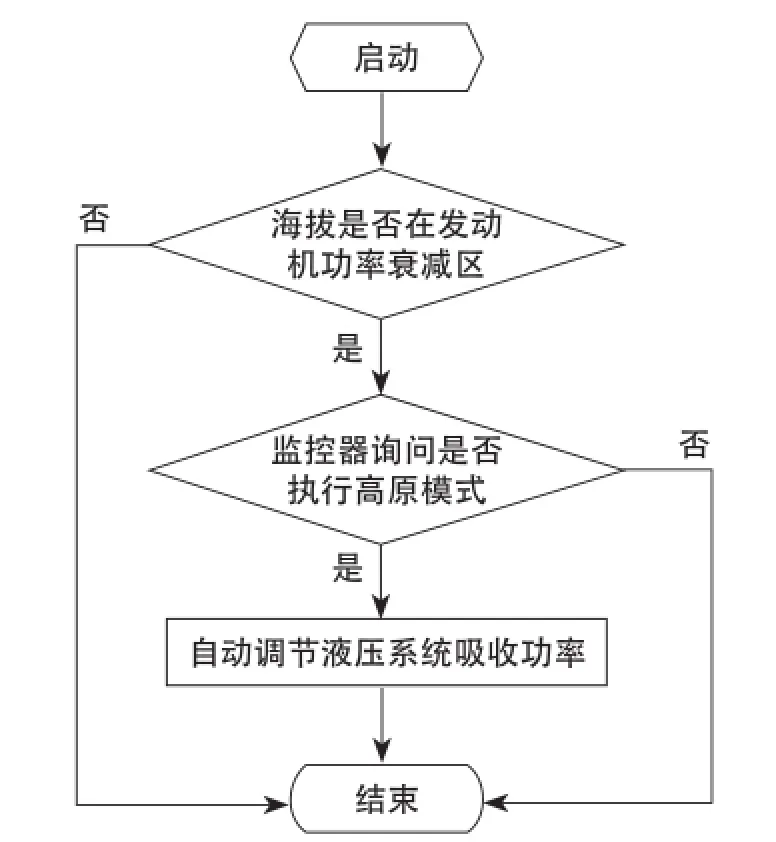
图3 高原自适应功能控制流程图
我们以某70t液压挖掘机为例,该液压挖掘机安装的是康明斯QSX15发动机,这款发动机在海拔高度2 438m以下时,功率没有变化,在2 438m以上,每增加300m功率下降4%。在该液压挖掘机上增加了高原自适应功能,根据上述发动机功率与海拔高度的关系,对液压系统进行调节,目前批量销售到海拔4 200m的青藏高原地区,发动机与液压系统匹配良好,没有出现前文所述的一系列高原问题。
此外,由于同一海拔高度的不同地区大气压力可能不同,发动机的实际功率与厂家提供的参考值可能不同,如果仅仅按照厂家推荐值对液压系统功率进行设定,并不能完全实现发动机和液压系统的匹配,这种情况就需要检测大气压力,根据大气压力推测发动机的实际功率,进而对液压系统进行调节,这种方法能够实现发动机和液压系统的准确匹配。
(编辑 吴学松)
[中图分类号]TU621
[文献标识码]B
[文章编号]1001-1366(2015)04-0047-02
[收稿日期]2015-03-06
Research of plateau adaptive hydraulic excavator control
猜你喜欢
装备制造技术(2020年4期)2020-12-25
现代经济信息(2016年27期)2016-12-16
移动通信(2016年20期)2016-12-10
科学与财富(2016年15期)2016-11-24
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
商场现代化(2016年19期)2016-07-29
现代经济信息(2016年9期)2016-05-24
有色金属设计(2015年2期)2015-02-28
筑路机械与施工机械化(2014年10期)2014-03-01
筑路机械与施工机械化(2014年8期)2014-03-01