工程机械行走液压回路极限匹配方法
2015-08-02 08:22烨LINChuangFEIYe沈阳建筑大学机械工程学院辽宁沈阳110168
建筑机械化 2015年4期
林 闯,费 烨LIN Chuang, FEI Ye(沈阳建筑大学 机械工程学院,辽宁 沈阳 110168)
工程机械行走液压回路极限匹配方法
林 闯,费 烨
LIN Chuang, FEI Ye
(沈阳建筑大学 机械工程学院,辽宁 沈阳 110168)
[摘 要]针对工程机械液压行走回路设计中参数匹配问题,从角功率概念出发,基于底盘牵引调速的极限工况系统性匹配闭式行走回路中的泵和马达,适于全液压工程机械底盘行走回路的工程设计。
[关键词]角功率;工程机械;行走回路;匹配
由于静压传动便于实现无级变速,较液力传动效率更高,近年闭式回路在推土机、挖掘机、履带起重机这类载荷、速度组合多变的工程机械底盘上得到应用,其中元件的合理匹配开始为研究人员所关注并提出多种方法,但多偏重于单一元件的理论优选、缺乏系统关联性考虑且较为烦琐不便于工程使用。本文尝试从角功率概念出发,给出一种便于工程实用的工程机械闭式行走回路系统参数匹配方法。
1 变量闭式行走回路的组成及概念
液压驱动的工程机械底盘,通常利用发动机驱动变量泵带动变量马达,经减速器减速后驱动车轮(或链轮),其基本组成及相关参数见图1。
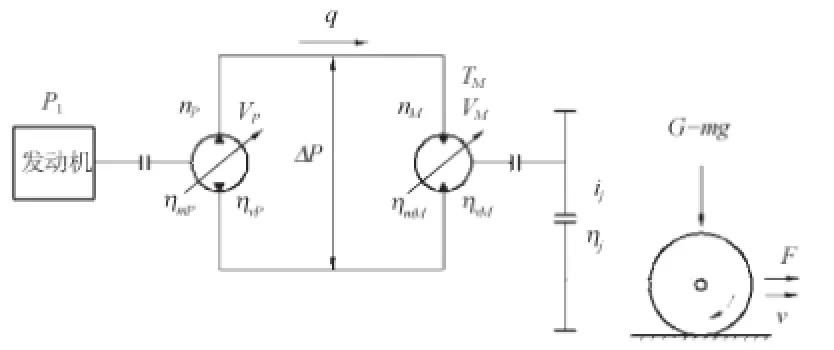
图1 变量闭式行走回路简图
工程中常在发动机一定的前提下设计液压系统。因而,本文主要对变量泵、变量马达的匹配方法进行说明,这里先给出相关概念。
1.1 行走机构主机负载值
行走机构主机负载值反映了主机的作业要求,它取决于车辆的车速与牵引力。用功率P1表示
其中,η为行走机构总效率。
1.2 液压传动负载值
液压传动负载值反映了系统的传动能力,它取决于液压马达的转速和扭矩,用功率Pt表示
Pt=2πnMTMηt
其中,ηt为马达下游传动总效率。
1.3 角功率
对于车辆系统而言,将最大牵引力与最大行驶速度之积Fmaxυmax称为角功率。
实际工作中最大牵引力与最大行驶速度并不同时出现,因此角功率只是主机行走的一个名义功率,表示行走牵引力和行走速度的范围,它反映了行走机构液压系统需具备的功率容量,即系统最大的能量传递能力。
1.4 调节范围
通常情况下,行走机构液压回路实际传递功率小于其额定功率,这就需要对马达扭矩和转速进行调整,一般通过容积调速来实现。
将系统或元件额定功率与实际传输过去的功率之比,称为系统或元件的功率调节范围,用R表示。
就行走液压回路而言,其输入功率就是发动机功率扣除其它工作装置消耗掉的准备用于传递的功率,即功率P1,它不应超过回路的额定功率。
行走回路的额定功率应由角功率确定,即
P额=P角=Fmaxυmax
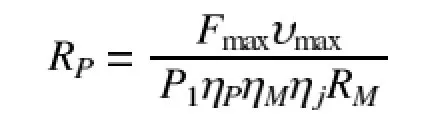
故此,对于行走液压回路,其调节范围
当R≤3时,只通过变量泵调节即可,此时为恒转矩调速。
当R>3时,采用变量泵+变量马达调节,它分为恒转矩调速和恒功率调速两个阶段。
因此,调节范围可表示为

仅用变量泵时,RM=1;采用变量泵+变量马达时,取:
2 变量闭式行走回路的参数计算
2.1 液压泵参数
由式(1)可得
结合图1,变量泵调节范围可表示为

代入上式得
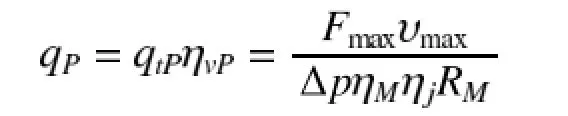
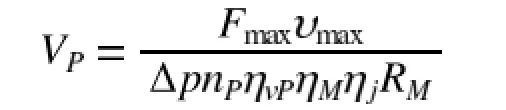
则泵的排量
若是变量泵+定量马达,按最大速度工况确定泵最大排量

若是变量泵+变量马达,按最大负载工况确定泵最大排量

2.2 液压马达参数
结合图1有
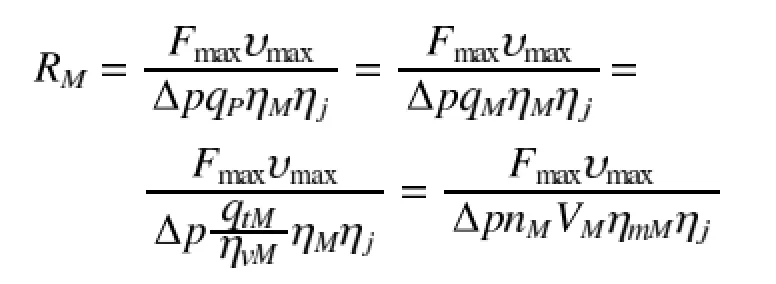
故马达排量

对于变量马达,当nM=nMmax、Δp=ΔpMmax时,有
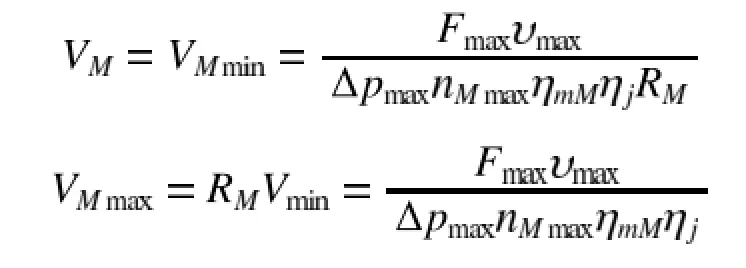
考虑到

则有

据式(1)~式(5)即可完成变量闭式行走回路中泵和马达的选择匹配。
2.3 行走机构液压系统性能验算
行走回路的参数匹配,根据车辆要求的最大牵引力Fmax与最大行驶速度υmax即角功率来完成。完成泵和马达的匹配计算后,应对所选泵、马达组合成的系统进行性能验算,以保证系统最大负载、最大速度工况提供的最大牵引力和最大行驶速度均符合要求。
3 结 语
本文基于变量闭式行走回路的结构组成,从角功率概念出发,依据车辆要求的最大牵引力 与最大行驶速度 两种极限工况对液压行走回路参数进行匹配,可用于全液压工程机械底盘行走回路的工程设计。
(编辑 贾泽辉)
[中图分类号]TH137
[文献标识码]B
[文章编号]1001-1366(2015)04-0045-02
[收稿日期]2015-03-02
Construction machinery walking hydraulic circuit limit matching method
猜你喜欢
商品与质量(2021年43期)2022-01-18
铜业工程(2021年2期)2021-06-27
铜业工程(2021年1期)2021-04-23
表面工程与再制造(2019年1期)2019-12-04
汽车观察(2018年9期)2018-10-23
汽车工程学报(2016年5期)2017-01-16
现代经济信息(2016年27期)2016-12-16
移动通信(2016年20期)2016-12-10
科学与财富(2016年15期)2016-11-24
中小企业管理与科技·下旬刊(2016年10期)2016-11-18