基于电液比例控制的遥控挖掘机控制系统设计
2015-07-29 08:02孟凡建杨裕丰马瑞永MENGFanjianYANGYufengMARuiyong徐州徐工挖掘机械有限公司江苏徐州221004
建筑机械化 2015年3期
关键词:控制器
孟凡建,杨裕丰,马瑞永MENG Fan-jian, YANG Yu-feng, MA Rui-yong(徐州徐工挖掘机械有限公司,江苏 徐州 221004)
基于电液比例控制的遥控挖掘机控制系统设计
孟凡建,杨裕丰,马瑞永
MENG Fan-jian, YANG Yu-feng, MA Rui-yong
(徐州徐工挖掘机械有限公司,江苏 徐州 221004)
[摘 要]提出了基于电液比例控制实现液压挖掘机的智能遥控,可实现液压挖掘机的近控操作、遥控操作及自动挖掘,介绍了智能遥控挖掘机的技术原理及技术方案。
[关键词]液压挖掘机;电液比例控制;控制器;智能遥控
随着社会生产的不断发展,往往需要挖掘机在高温、爆炸、污染、远距离等特殊环境下进行施工作业,同时又要保证操作人员的人身安全。遥控挖掘机通过无线遥控技术在挖掘机上的应用,可以实现在上述特殊环境工况下通过远程操作控制,完成同手动操作完全相同的作业功能,满足无人驾驶机器快速完成作业的要求。在保证人员安全的前提下,提高作业效率,完成特殊作业要求。
随着微电子技术以及机电一体化的不断发展与应用,电子控制系统为挖掘机的智能化奠定了基础,通过控制器程序的编写和现场调试,能够达到挖掘机的智能控制。
1 技术原理
遥控液压挖掘机的控制系统主要由无线遥控系统、控制器系统和液压系统等组成。无线遥控系统包括无线遥控发射器和遥控接收器。控制器系统包括主控制器、存储器、油门执行器及压力传感器等。液压系统包括电液比例阀块、液压泵、多路主阀、液压油缸等。其系统简图如图1所示。
普通液压挖掘机由液压先导手柄操纵,通过操作手柄控制多路主阀的先导压力,进而控制挖掘机主阀阀芯的开度,实现控制整机动臂、斗杆、铲斗、回转及行走的动作。

图1 遥控液压挖掘机系统简图
本方案通过在先导油路中加装电液比例阀块,通过主控制器控制电液比例阀输出的先导压力,实现控制整机动臂、斗杆、铲斗、回转及行走的动作。同时电液比例阀的精度较高,容易实现精准控制,方便实现遥控时对整机动作的精准控制。遥控挖掘机驾驶室内仍采用液压先导手柄,仅需在先导手柄压力输出端加装压力传感器,成本低且改动少,易于实现。
遥控操作时操作遥控发射器上相应的手柄,此时遥控发射器发射相应信号。遥控接收器接收遥控发射器的信号,并通过CAN总线发送给主控制器,主控制器根据输出信号控制电液比例阀的输出压力,进而控制挖掘机主阀阀芯的开度,实现对动臂、斗杆、铲斗、回转及行走等动作的控制。
在挖掘机上近控操作时,仍使用液压先导手柄操作。主控制器通过检测先导手柄上压力传感器的压力,控制电液比例阀的输出压力,从而控制挖掘机主阀阀芯的开度,实现对动臂、斗杆、铲斗、回转及行走等动作的控制,相应动作速度和先导手柄转动角度成正比。
挖掘机动作学习与回放时,首先执行学习模式,由熟练的操作手通过遥控发射器或在驾驶室内操作需要存储的动作,主控制器将所有动作的电流信号通过CAN总线按时序存储在存储器中。回放模式时,主控制器按时序读取存储器中的电流信号,并输出给电液比例阀,从而使挖掘机再现之前学习的动作。
2 技术方案
2.1 无线遥控系统
无线遥控系统包括无线遥控发射器和遥控接收器。工作频率为863~870MHz,标准操作距离可达200m。遥控器采用双CPU控制,第一个CPU工作时第二个CPU对第一个CPU实行监控,如果第一个CPU产生误指令,第二个CPU将切断第一个的工作指令,以保证在任何非正常工作状态下实现遥控系统的自动关闭功能,避免任何错误信号对接收继电器或通讯接口产生错误指令,减少事故的发生。
无线遥控发射器上设有万向操作手柄及开关,操作手柄可定义为与挖掘机实际操作习惯相同,方便对挖掘机进行安全地操作。
遥控接收器与控制器通讯采用CAN总线通讯方式。遥控发射器外形如图2所示。遥控发射器操作手柄及开关定义如表1所示。
2.2 控制器系统

图2 遥控发射器外形图
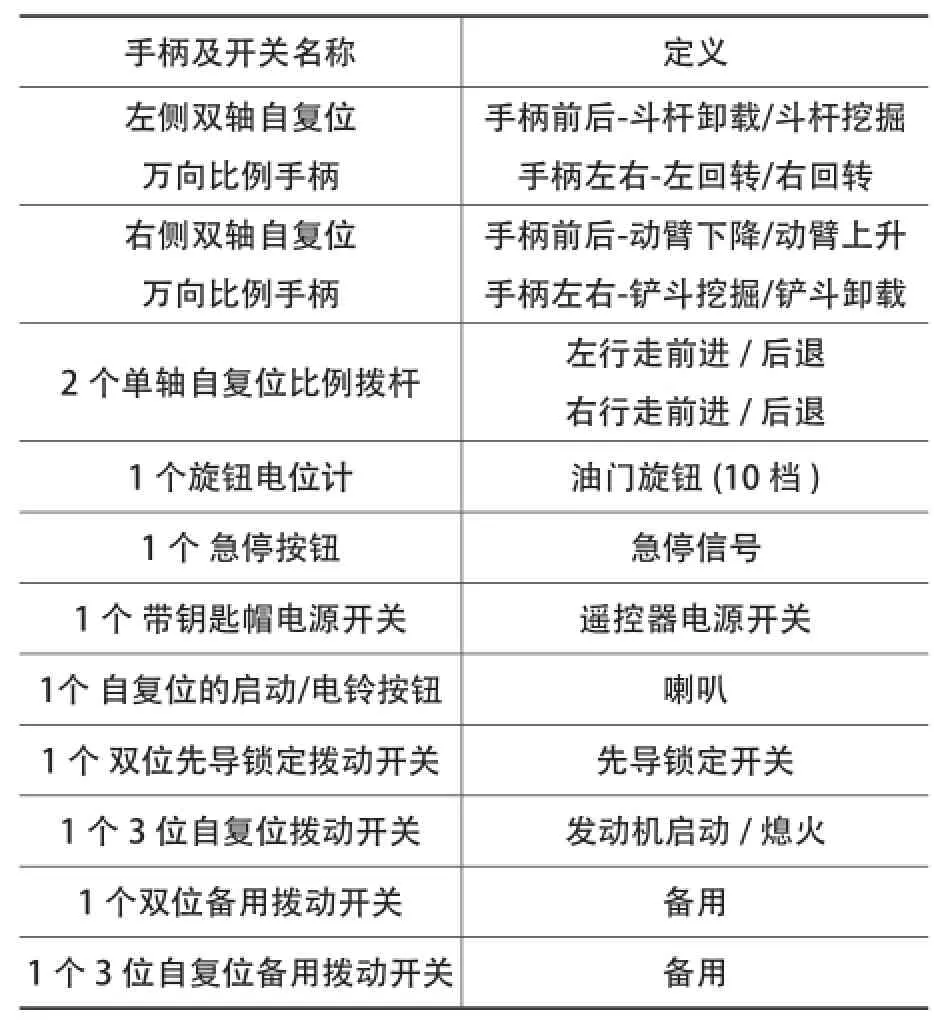
表1 遥控发射器操作手柄及开关定义
控制器系统包括主控制器、存储器、油门执行器、压力传感器和水平传感器等。主控制器接收先导操作手柄压力传感器的电压信号,通过CAN总线与遥控接收器之间进行通讯,通过CAN总线与存储器之间进行存储控制。选用带位置反馈电位计的油门执行器,主控制器通过接受油门旋钮指令及位置反馈电位计信号,达到精确控制油门执行器来控制发动机的转速。最后根据各控制信号对回转、动臂、斗杆、铲斗、行走等动作相应的比例电磁阀进行控制。
压力传感器将回转、动臂、斗杆、铲斗、行走等动作的压力信号转换成电压信号传送给控制器,电压信号随先导操作手柄开度的变化而变化。水平传感器选用总线式双轴水平传感器。水平传感器通过CAN总线将挖掘机整机的倾角信号发送给主控制器,当机器倾斜角度大于设定值时,主控制器限制动臂下降、斗杆收回动作的输出电流,限制动臂下降、斗杆收回动作,防止机器因误操作出现倾翻,保证操作安全。
系统软件采用CoDeSys,CoDeSys是一种支持IEC1131-3标准,功能强大的PLC软件编程工具。控制系统软件由主程序PRG和相关功能模块FBD构成,主程序通过调用相关子程序和功能模块完成控制功能。
基本控制流程为:系统上电后默认为近控状态,当使用驾驶室内钥匙开关启动发动机时切换为近控状态,驾驶室内先导安全锁处于开锁状态时也切换为近控状态。只有驾驶室内先导安全锁处于锁定状态下才允许进入遥控状态, 在此状态下,当遥控器上的先导开关由关闭切换为打开状态,按下遥控器上的喇叭后才切换为遥控状态。遥控状态下,可通过遥控器上的启动、熄火开关控制发动机的启动、熄火。任何状态下,在驾驶室内通过钥匙开关均可控制发动机的启动、熄火;任何状态下,在驾驶室内通过喇叭按钮或通过遥控器上的喇叭按钮均可控制喇叭的鸣响。
2.3 液压系统
液压系统包括电液比例阀块、液压泵、多路主阀、液压先导手柄及液压执行元件(液压油缸、液压马达)等。先导控制比例阀为电比例控制式液压阀,电液比例阀输出压力与给定比例电磁阀线圈的电流成正比。在主控制器输出电流的控制下,控制各动作的先导液压油压力,从而控制各主换向阀的开度和换向。
液压系统其它部分不做改动,便于利用普通液压挖掘机进行快速改装,可快速满足特殊需求。
3 系统功能
通过实施上述技术方案的遥控液压挖掘机具有以下功能。
1)遥控功能 通过操作遥控器上相应手柄,可实现机器的远程启动、熄火,遥控挖掘机完成相应的整机作业动作。
2)近控操作功能 可在挖掘机驾驶室内正常进行手动操作,适应性更强。
3)动作学习与回放功能 打开遥控器上的学习开关,控制系统可记录手动操作时所做的动作;打开遥控器上的回放开关,挖掘机可以进行自动操作,所做的动作与手动操作时所做的动作完全相同。
4)防倾翻功能 应用水平传感器,当机器倾斜角度大于设定值时限制动臂下降、斗杆收回动作,防止机器因误操作出现倾翻,保证操作安全。
5)自动怠速 当挖掘机无操作动作时,自动降低发动机转速,降低油耗,减小噪音。
6)急停功能 设有急停开关,有效保证挖掘机安全运行。
4 总结及展望
通过在徐工XE40液压挖掘机上实施上述技术方案,达到了预期效果。遥控操作改变了传统手动操作的束缚,具有使用灵便、节省人力、作业安全等特点。为液压挖掘机满足特殊工况需求做了有益的尝试。今后需进一步研究各种工况下遥控操作的适应性,提高控制精度,满足施工工况要求。
[参考文献]
[1] 刘心昊,张大庆.一种新型智能挖掘机的设计与实现[J].建筑机械,2010,(5):100-102.
[2] 崔国华,张艳伟,侯红娟.基于遥控操作的挖掘机操纵系统的实现[J].农业装备与车辆工程,2007, (5):19-20.
[3] 邹宽明.CAN总线原理和应用系统设计[M].北京:北京航空航天大学出版社,1996.
(编辑 吴学松)
[中图分类号]TU621
[文献标识码]B
[文章编号]1001-1366(2015)03-0041-03
[收稿日期]2015-01-04
Design of remote control excavator control system based on electro-hydraulic proportional control
猜你喜欢
煤气与热力(2021年12期)2022-01-19
通信电源技术(2016年4期)2016-04-04
应用科技(2015年5期)2015-12-09
电子设计工程(2015年13期)2015-02-27
电测与仪表(2014年8期)2014-04-04
电测与仪表(2014年3期)2014-04-04
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28
自动化博览(2014年4期)2014-02-28
自动化博览(2014年4期)2014-02-28