七自由度机器人误差建模及标定试验研究*
2015-07-18 11:24张义万石成江王殿君刘淑晶
新技术新工艺 2015年10期
张义万,石成江,王殿君,刘淑晶,吴 超,相 臣
(1.辽宁石油化工大学 机械工程学院,辽宁 抚顺 113001;2.北京石油化工学院 机械工程学院,北京 102617)
七自由度机器人误差建模及标定试验研究*
张义万1,石成江1,王殿君2,刘淑晶2,吴 超2,相 臣2
(1.辽宁石油化工大学 机械工程学院,辽宁 抚顺 113001;2.北京石油化工学院 机械工程学院,北京 102617)
通过FA1400机器人的运动学以及误差学理论,推导了FA1400七自由度机器人的运动学模型,设计了基于PMAC的控制系统,利用激光跟踪仪对FA1400机器人进行了误差标定试验,试验验证了误差建模的正确性,并得出了该机器人的定位精度。设计实现的七自由度机器人控制系统为进一步研究冗余自由度工业机器人奠定了基础。
七自由度;误差;PMAC
六自由度的机器人理论上可以达到空间中的任意位置和姿态,然而对于作业复杂和环境恶劣的工作,由于六自由度机器人存在奇异位型,某些关节运动到某一位置时就会失去一个或几个自由度,无法达到要求的位置,使机器人无法满足工作要求;因此,需要采用具有高度灵活性和出众避障能力的七自由度工业机器人。
目前,美国、日本等国家已经先后研制出了七自由度机器人,而我国对七自由度工业机器人的研究还处于探索阶段,研究该种构型的工业机器人对我国工业生产具有深远的意义。本文针对FA1400七自由度工业机器人,设计基于PMAC运动控制卡的开放式控制系统,并在此基础上对该机器人进行误差建模及标定试验[1]。
1 七自由度工业机器人误差建模
1.1 机器人运动学
FA1400机器人是在六自由度机器人的二、三关节之间添加一个旋转的关节,构成七自由度工业机器人。该结构和人的手臂类似,符合仿生学理论。其结构原理图如图1所示。

图1 七自由度机器人结构原理图
根据FA1400机器人的结构对其进行正运动学分析,得出该机器人的连杆参数见表1。
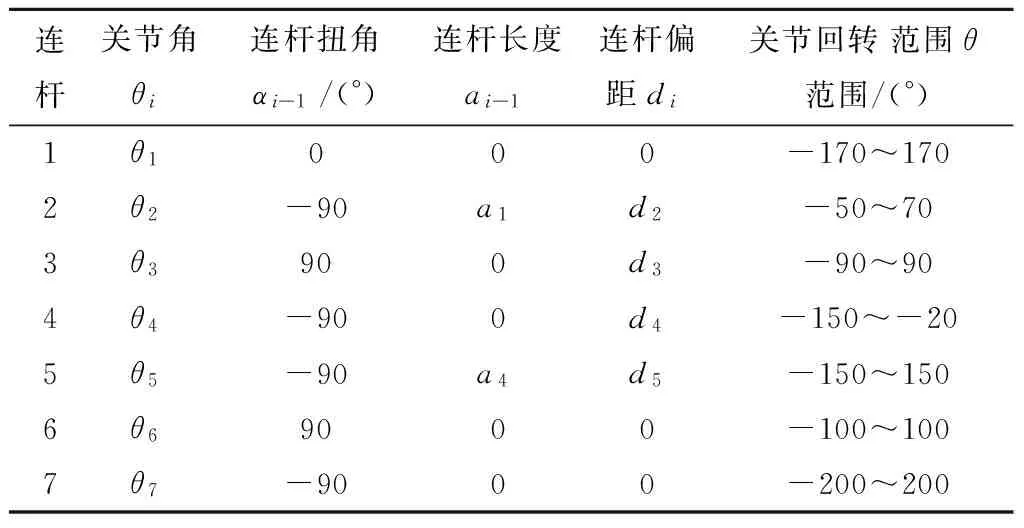
表1 连杆参数表
根据连杆参数,通过相邻连杆的齐次变换矩阵,推导出七自由度工业机器人运动学公式为:
式中,px、py、pz分别是机器人末端的位置表达式,px=200(cosθ1cosθ2cosθ3-sinθ1sinθ3)cosθ4-200cosθ1sinθ2sinθ4-650(cosθ1cosθ2cosθ3-sinθ1sinθ3)sinθ4-650cosθ1sinθ2cosθ4-98cosθ1cosθ2sinθ3-98sinθ1cosθ3+676cosθ1sinθ2+165cosθ1+20sinθ1;py=200(sinθ1cosθ2cosθ3+cosθ1sinθ3)cosθ4-200sinθ1sinθ2sinθ4-650(sinθ1cosθ2cosθ3+cosθ1sinθ3)sinθ4-650sinθ1sinθ2cosθ4-98sinθ1cosθ2sinθ3+98cosθ1cosθ3+676sinθ1sinθ2+165sinθ1-20cosθ1;pz=-200sinθ2cosθ3cosθ4-200cosθ2sinθ4+650sinθ2cosθ3sinθ4-650cosθ2cosθ4+98sinθ2sinθ3+676cosθ2。
1.2 七自由度机器人误差模型
所谓几何参数[2]误差,是指运动学模型中各关节的几何参数的理论值与真实值之间的误差。它们分别是杆长误差Δa、连杆扭角误差Δα、连杆偏距误差Δd和关节角误差Δθ。其中,杆长误差、连杆扭角误差和连杆偏距误差主要是由机械本体加工所产生,而关节角误差主要是由电动机的精度及传动机构的间隙而引起。机器人几何参数误差示意图如图2所示。
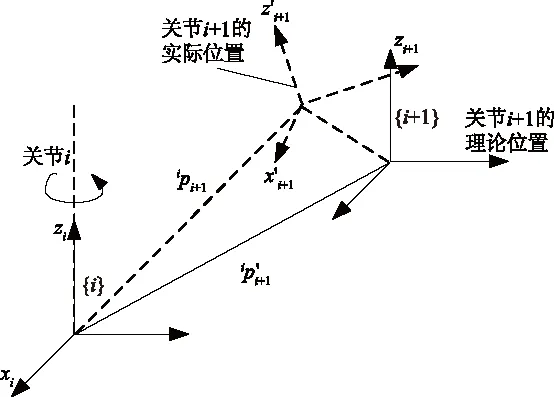
图2 机器人几何参数误差示意图
由运动学可知,机器人的末端位置由各个连杆参数决定,它们的关系式如下:
P=F(a,d,α,θ)
而实际的机器人位置是由真实的连杆参数决定的,因此有:
P′=F(a+Δa,d+Δd,α+Δα,θ+Δθ)
则机器人的末端位置误差可以写成:
ΔP=P-P′
因为这些误差相对比较小,可以将这些小误差简化成其相应的线性方程:

式中,∂a表示∂a0、∂a1、∂a2、∂a3、∂a4、∂a5、∂a6;∂α表示∂α0、∂α1、∂α2、∂α3、∂α4、∂α5、∂α6;∂d表示∂d1、∂d2、∂d3、∂d4、∂d5、∂d6、∂d7;∂θ表示∂θ1、∂θ2、∂θ3、∂θ4、∂θ5、∂θ6、∂θ7。
将上式中Δa、Δd、Δα、Δθ的系数写成一个3行28列的矩阵,形式为:
机器人的几何误差参数矢量如式:
Δδ=

那么机器人的误差模型的表达式为:
ΔP=JδΔδ
该式的结果是一个3行1列的矩阵,矩阵中的元素分别为末端在X、Y、Z等3个方向的误差表达式。
2 七自由度机器人控制系统[3]
2.1 机器人控制系统总体方案
目前,工业机器人常用的运动控制方案为工控机+运动控制卡。考虑到本文所设计的机器人控制系[4]应具有良好的开放性和扩展性,FA1400机器人采用了基于PMAC运动控制卡的控制方案。该系统的开放性非常好,有利于机器人研究人员对系统功能进行二次开发和扩展。该方案如图3所示。

图3 机器人控制系统总体方案
2.2 控制电路设计及控制柜搭建
本系统使用的交流伺服电动机应与相应的驱动器连接,驱动器负责接收PMAC控制卡发出的控制信号,并将信号放大为可驱动伺服电动机工作的电流。PMAC在和伺服驱动器连接时,通过一根扁平电缆(60芯),一侧接在PMAC的输出口(JMACH),另一侧接在转接板上。根据设备接口说明以及需要实现的功能,完成设备间电路连接设计,电路设计如图4所示。
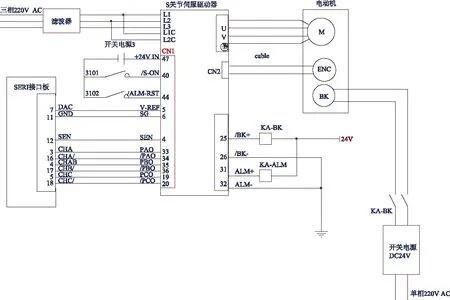
图4 伺服电动机控制电路图
从安全和方便维护管理角度考虑工业机器人的工作环境,应把一些硬件放入到一个控制柜中,这就需要搭建电气控制柜。电气控制柜的参数见表2,搭建完成的电气控制柜实物图如图5所示。
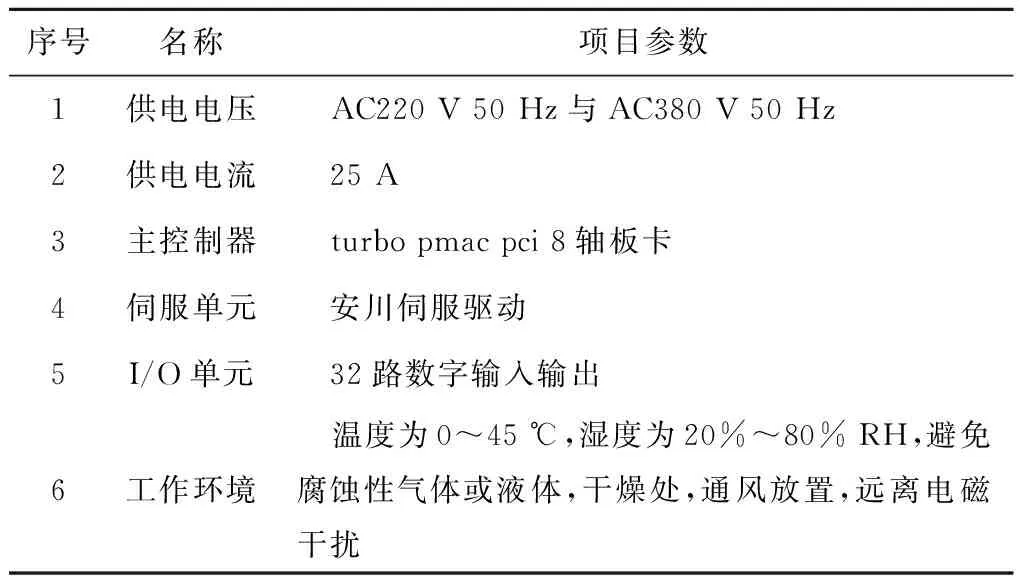
表2 电气控制柜参数表

图5 电气控制柜实物图
2.3 上位机软件开发
七自由度工业机器人控制系统的软件部分在硬件系统完成的基础上进行设计。控制软件系统在Windows XP下使用VC++6.0开发。针对本系统的特点,将控制软件分为上位机和下位机两部分,软件系统的层次结构如图6所示。
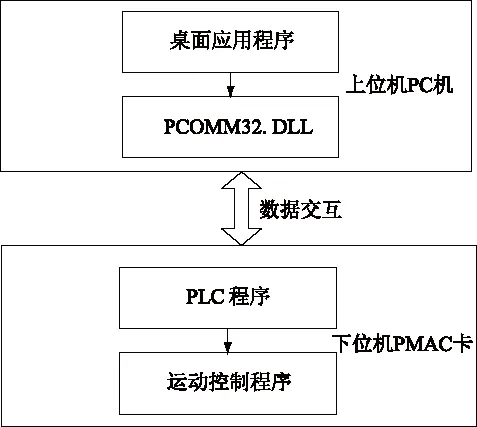
图6 控制系统的软件结构
2.4 控制系统上位机软件实现
本文开发的上位机软件,使用了面向对象的技术,基于MFC对话框开发,开发软件的流程图如图7所示。
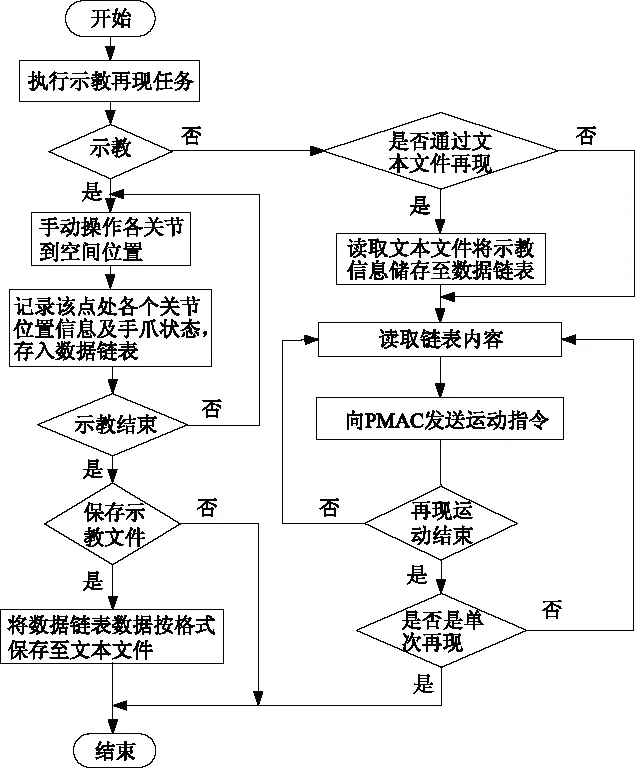
图7 软件流程图
在windows XP下使用VC++6.0开发出了七自由度工业机器人的控制软件,软件界面如图8所示。
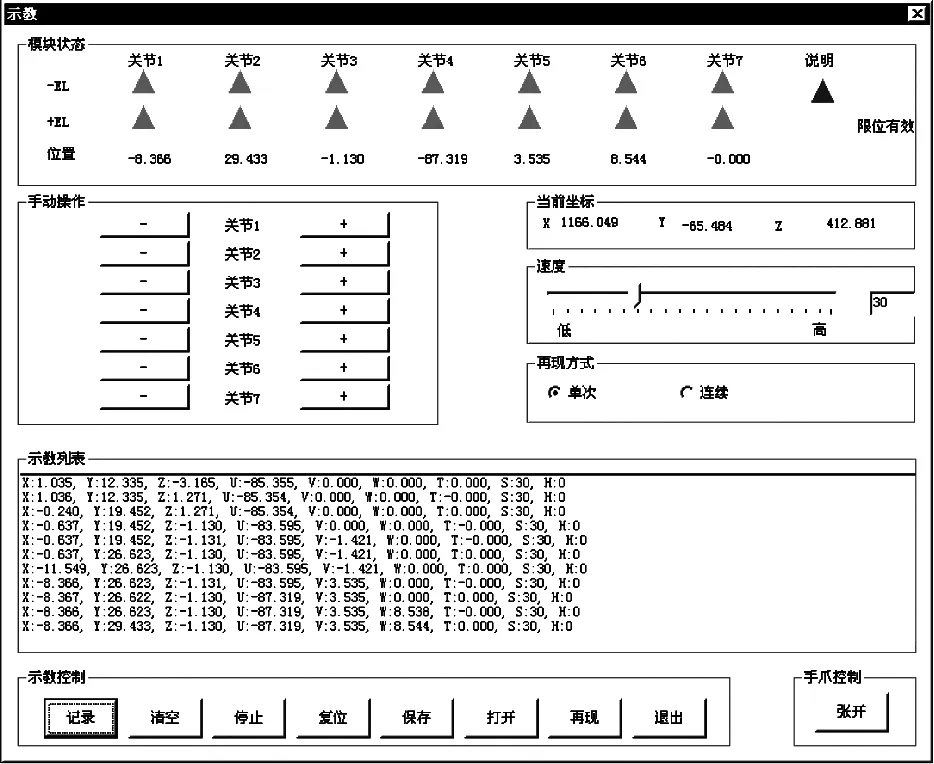
图8 上位机软件界面
3 误差标定[5]试验
3.1 验证误差模型
本文使用激光跟踪仪[6]对七自由度工业机器人的误差进行直接标定,激光跟踪仪如图9所示。测量机器人连杆参数的误差见表3。

图9 激光跟踪仪
表3连杆参数的误差

连杆Δa/mmΔd/mmΔα/(°)Δθ/(°)1000.10151.48420.3271.2820.09770.254730.2010.7840.09480.207440.4730.6290.09950.143950.2480.2120.10020.124361.3110.1310.11030.207270.82000.09200.1037
机器人的末端误差理论上由连杆参数误差以及关节角确定,利用激光跟踪仪测量机器人末端的实际位置和理论位置对比得出ΔP′,利用上述误差模型公式计算出ΔP,通过对比可以验证误差模型求解的正确性。根据试验测量的误差和误差模型公式可以求得的误差见表4。
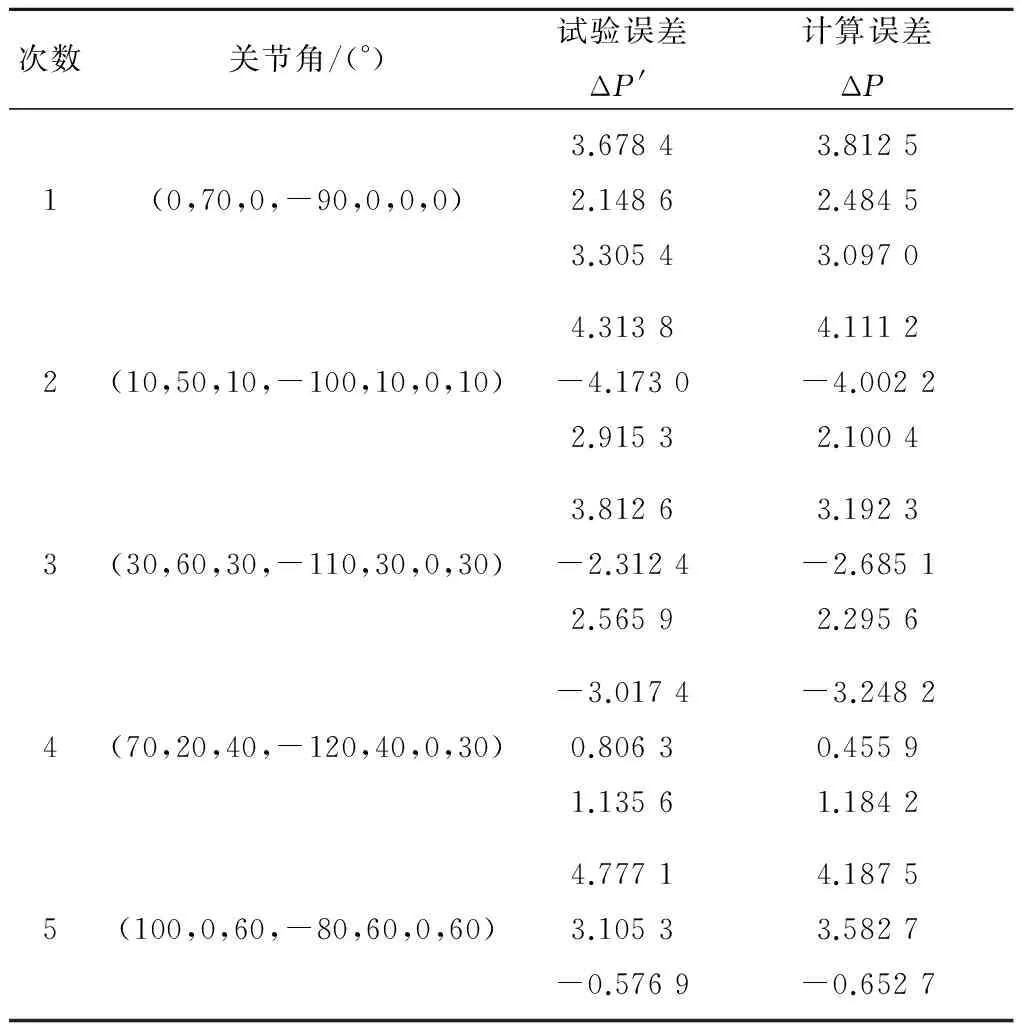
表4 理论误差与测量误差
从表4可以看出,2种方法求出的结果偏差≤0.6 mm,证明了误差模型的正确性。
3.2 机器人定位误差标定[7]
首先,取10组关节角变量,由七自由度机器人运动学公式,计算出10组关节变量对应的10个空间点的位置坐标;然后,操作机器人的各个关节联动,分别以这10组关节变量运动到空间中的目标点;最后,使用激光跟踪仪采集这10个点的位置信息,将激光跟踪仪测得的数据(见表5)和理论计算结果对比。

表5 激光跟踪仪测量结果
由表5的数据可以看出,利用激光跟踪仪得到FA1400机器人的定位精度≤1.7 mm,定位精度较高。
4 结语
1)结合机器人运动学以及误差理论建立了FA1400七自由度机器人的误差模型。
2)分别从硬件和软件两方面为七自由度工业机器人设计了基于PMAC多轴控制卡的控制系统[8]。
3)利用激光跟踪仪进行了误差标定试验,试验验证了误差模型的正确性,并得出了机器人的定位精度为1.7 mm,为进一步研究冗余自由度机器人奠定了基础。
[1] 南小海.6R型工业机器人标定算法与实验研究[D].武汉:华中科技大学,2008.
[2] 蔡鹤皋,张超群,吴伟国.机器人实际几何参数识别与仿真[J].中国机械工程, 1998,9(10):11-14.
[3] 王启春. 六自由度开放式工业机器人控制系统设计[D]. 上海:华东理工大学, 2011.
[4] 胡鹏, 方康玲, 刘晓玉. 基于PMAC的开放式机器人控制系统[J]. 微计算机信息, 2006(11): 171-174.
[5] 王品, 廖启征, 庄育锋, 等.一般7R串联机器人标定的仿真与实验[J].机器人, 2006, 28(5): 483-487.
[6] 叶声华,王一,任永杰,等.基于激光跟踪仪的机器人运动学参数标定方法[J].天津大学学报,2007(2):202-205.
[7] 张邦成,韩跃营,王占礼,等.基于PMAC的仿人按摩机器人手臂控制系统设计[J].机械设计与制造,2012(4):56-58.
[8] 李维涛,刘松平,孙严,等.基于PMAC的复合材料检测设备数控系统开发[J].航空制造技术,2014(3):82-85.
*国家“八六三”高技术项目(2012AA041402)北京石油化工学院大学生研究训练(URT)计划项目(2014J00087)
责任编辑郑练
TheResearchofErrorModelingandtheCalibrationExperimentofSevenDegreeofFreedomRobot
ZHANG Yiwan1, SHI Chengjiang1, WANG Dianjun2, LIU Shujing2, WU Chao2, XIANG Chen2
(1.Mechanical Engineering Academy, Liaoning Shihua University, Fushun 113001, China;2.Mechanical Engineering Academy, Beijng Institute of Petro-chemical Technology, Beijing 102617, China)
The theory of kinematics model of FA1400 robot with seven degrees of freedom is derived by FA1400 robot kinematics and error. The control system based on PMAC is designed. Based on laser tracker, the FA1400 robot error calibration experiment is conducted. The experiment results validate the correctness of error modeling and obtain the positioning accuracy of the robot. The design of seven degrees of freedom robot control system can lay the foundation for further study of the redundant degree of freedom industrial robot.
seven degrees of frcedom(7-DOF), error, PMAC

TP 242.6
:A
张义万(1988-),男,硕士研究生,主要从事工业机器人等方面的研究。
王殿君
2014-11-27
猜你喜欢
石油矿场机械(2022年3期)2022-06-17
装备制造技术(2020年2期)2020-12-14
汽车维修与保养(2020年11期)2020-06-09
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
制造技术与机床(2018年11期)2018-11-23
汽车实用技术(2017年16期)2017-09-21
中国惯性技术学报(2017年1期)2017-06-09