转管机枪枪膛合力在虚拟样机中的施加方法研究
2015-07-18 11:28化斌斌王瑞林王宇建孙也尊李心强
火炮发射与控制学报 2015年4期
化斌斌,王瑞林,王宇建,孙也尊,李心强
(1.军械工程学院火炮工程系,河北石家庄 050003;2.总装备部轻武器论证研究所,北京 102202;3.驻247厂军事代表室,山西太原 030009;4.73121部队,福建福州 350000)
转管机枪枪膛合力在虚拟样机中的施加方法研究
化斌斌1,王瑞林1,王宇建2,孙也尊3,李心强4
(1.军械工程学院火炮工程系,河北石家庄 050003;2.总装备部轻武器论证研究所,北京 102202;3.驻247厂军事代表室,山西太原 030009;4.73121部队,福建福州 350000)
根据转管武器的工作原理和运动特点,在建立转管机枪虚拟样机模型的过程中,综合运用ADAMS中的函数以及传感器功能,实现了转管机枪不同射击条件下枪膛合力的准确施加。该方法具有通用性,对外能源转管武器与内能源转管武器都适用。仿真结果表明,该方法的应用使转管武器更符合实际运动情况。
转管武器;枪膛合力;虚拟样机
转管武器按照自动工作原理一般有外能源转管武器和内能源转管武器两种[1]。外能源武器自动机主要依靠外部供能装置提供启发动力[2];内能源自动机依靠枪弹击发后产生的高温、高压燃气能量来带动自动机完成循环工作动作[3]。转管武器的主动力主要是炮(枪)膛合力,而且作用特点是在固定点顺序击发[4]。在利用虚拟样机对转管武器进行动力学分析时,炮(枪)膛合力的施加是模型一个非常关键的环节。如何实现转管武器的炮(枪)膛合力在ADAMS中施加,已经有相关文献研究过,但是文献[5- 6]中所提出的方法具有一定的局限性,只适用于转速为定值的外能源转管武器,而内能源转管武器在射击过程中身管组件的旋转速度是一直在变化的,文献中所提出的方法并不适用。因此,笔者以某三管内能源转管机枪为例,提出一种通用的转管武器炮(枪)膛合力的施加方法,使得转管武器炮(枪)膛合力的施加更加简便且更符合实际。
1 枪膛合力的计算与处理
根据经典内弹道方程组[7],利用龙格-库塔法可求解出内弹道时期的平均膛压随时间的变化曲线;后效期的平均膛压也可通过经验公式[8]求解得到。由此可得出弹丸整个运动过程中的膛内平均压强p,则膛底压强为

式中:ω为枪弹的装药量;φ1为次要功计算系数;q为弹头质量;p为平均膛压。
枪膛合力Ft计算公式为

式中,S为膛底横截面积。
经计算,得到的某三管转管机枪的枪膛合力如图1所示。
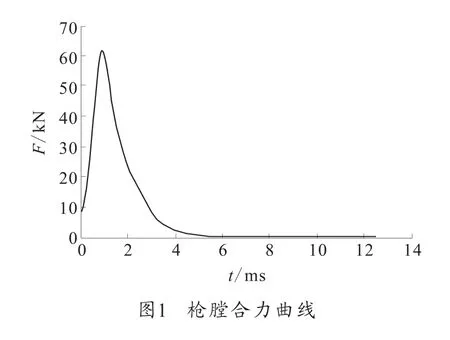
将计算得到的枪膛合力数据导入到ADAMS中,生成Spline曲线,命名为SPLINE_1。
2 枪膛合力的施加
转管武器是在固定位置(击发点)击发,根据转管武器的运动特点,一般有两种方法可以用来标定击发时机:一是身管在运动过程中转动的角度;二是机心部件在曲线槽作用下的轴向位移。相比较而言,后者判断起来要稍复杂些,因为每一个身管在转动一圈的过程中,机心部件在身管轴向上的位移会有两次与到达击发点的位移相等,因此还需要再另外增加判定条件。而前者就简单多了,只需要判断身管轴心经过击发点,即为击发时刻。
如图2所示,在与身管固连的节套上建立3个点为MARKER_1、MARKER_2、MARKER_3(分别对应图中O1、O2、O3),使3个MARKER点分别在3根枪管的膛底圆心上,在外机匣上对应击发位置建立1个点MARKER_JF(对应图中OJF),枪管组的截面圆心标记为MARKER_0点。
首先测出∠O1OOJF的大小α,即为身管1第1次击发时所转动的角度,则身管2、3第1次击发时所转过的角度分别为α+120°、α+240°。然后利用传感器(SENSOR)、MOD函数、AZ函数[9]即可监测枪管击发时刻。
MOD(x1,x2):返回x1/x2的余数。
AZ(MARKER_1,MARKER_2):实时返回MARKER_1相对于MARKER_2的z轴旋转的角度(弧度)。
建立枪管1击发传感器SENSOR_1,如图3所示,具体设置为在图3中(a)、(b)和(c)的对话框中分别写入SENSOR触发的表达式、SENSOR返回的值以及SENSOR的触发值如下所示:
(a)-MOD(AZ(MARKER_1,MARKER_ 0),2*pi)*180/pi;
(b)time;
(c)α。


传感器SENSOR_1的设定为每当枪管1的轴心经过击发位置时,返回此时的时间,枪管2、3的传感器方法设置同枪管1。
最后在对应枪管1的机头体上施加一单向力SFORCE_1,即为枪管1的枪膛合力,此时需要用到SIGN函数、SENVAL函数、IF函数和AKISPL函数[9]即可实现转管武器枪膛合力的施加。
如果x2≥0,SIGN(x1,x2)=ABS(x1);如果x2<0,SIGN(x1,x2)=-ABS(x1)。
SENVAL(SENSOR_1):返回SENSOR_1的值。
IF(x:x1,x2,x3):当x<0时,返回x1值;当x=0时,返回x2值;当x>0时,返回x3值。
AKISPL(x1,x2,spline name,derivative order):x1为第1个自变量;x2为第2个自变量,设为0;spline name是所使用样条曲线;derivative order表示微分的阶次,取0时返回样条曲线的坐标值。
SFORCE_1定义为:
-0.5*(sign(1,-SENVAL(SENSOR_1))-1)* IF(time-SENVAL(SENSOR_1):0,0,IF(time-SENVAL(SENSOR_1)-th:AKISPL(time-SENVAL(SENSOR_1),0,SPLINE_1,0),0,0))(3)式中:th为后效期结束时间。
-0.5*(sign(1,-SENVAL(SENSOR_1))-1)为附加因子,这是由于SENSOR是通过SENVAL值的突变来实现控制载荷施加的,在系统开始求解瞬间SENVAL的输出从无到有,虽然输出值为0,但ADAMS即认为SENSOR触发,这样造成枪膛合力从计算一开始就被施加了,显然不符合实际情况,而附加因子就很好地解决了这个问题。
SFORCE_1的含义为:从SENSOR_1触发到后效期结束,机头体受到枪膛合力作用,后效期结束后,枪膛合力为0。
另外,内能源转管机枪的主动力还有气室压力,其实现方法同枪膛合力,在此不再赘述。
3 枪膛合力仿真结果
根据上文中枪膛合力的施加方法,在ADAMS中对某型三管内能源转管机枪进行了仿真计算,建立的虚拟样机模型如图4所示,得到的各枪管枪膛合力曲线如图5所示。

从图5可以看出,前面3次击发的时间间隔相较后面的击发间隔要大一些,这是因为内能源转管机枪依靠火药燃烧产生的气室压力推动自动机运动,自动机的转速是逐渐增大的,当射频达到稳定后,击发间隔才基本相等,这一点也说明了本文方法更加符合实际情况并具有通用性。

4 不同条件下的射击载荷施加
考虑转管武器不同射击方式的应用实际,对间隔射击和延时射击的载荷施加方法进行了研究。
4.1 间隔射击
间隔射击即为间隔m发弹击发,可采用下式进行判定控制:
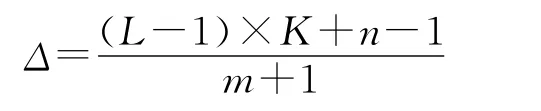
式中:L为枪管组旋转圈数;K为转管武器身管数;n为管序;m为间隔发数。如果Δ余数为0,则第n根身管击发。
为实现这一方法,还需要用到ADAMS中的AINT函数。
AINT(x):返回参数x向零取整的整数。
则间隔m发射击时,第n根身管受力表达式为:

式(4)中,只需将式(3)中的SENSOR序列号与式(4)中的身管序列号对应就可以。
4.2 延时射击
转管武器延时射击,可以通过时间控制方法或者角度控制方法来实现。
时间控制方法可表述如下:

式中,t为延时时间。
式(5)中,如选用式(3)则为延时击发后不采用间隔射击;如选用式(4)则为延时击发后再间隔射击。
角度控制方法与时间控制方法原理相同,在此不再赘述。
5 结论
通过综合利用ADAMS中的传感器(SENSOR)和函数(MOD、AZ、SIGN、SENVAL、IF、AKISPL和AINT),提出了一种更加普遍适用的转管武器主动力的施加方法,该方法对外能源转管武器与内能源转管武器具有通用性。仿真结果表明,该方法能够更加真实地体现转管武器的实际运动情况,为后续的转管武器动力学特性研究奠定了基础。
(Referenees)
[1]王开政,赵建中,黄强,等.关于提高轮式转管炮武器射击密集度措施的探讨[J].火炮发射与控制学报,2010(2):9- 12.WANG Kaizheng,ZHAO Jianzhong,HUANG Qiang,et al.Investigation on improvement measures of fire density of wheeled Gatling weapons[J].Journal of Gun Launch&Control,2010(2):9- 12.(in Chinese)
[2]景银萍,杨臻,李强,等.某外能源转管机枪击发机构参数优化设计[J].振动与冲击,2010,29(12):153- 157.JING Yinping,YANG Zhen,LI Qiang,et al.Parameterization design of firing mechanism of certain external energy Gatling gun machine gun[J].Journal of Vibration and Shock,2010,29(12):153- 157.(in Chinese)
[3]郝秀平,薄玉成,徐健.某转管武器机芯应力有限元分析[J].中北大学学报:自然科学版,2010,31(2):113- 116.H AO Xiuping,BO Yucheng,XU Jian.Finite element stress analysis for Gatling gun bolt[J].Journal of North University of China:Natural Science Edition, 2010,31(2):113- 116.(in Chinese)
[4]刘荣华,高跃飞,刘辉亮,等.陀螺力矩对转管武器动态特性的影响[J].火炮发射与控制学报,2010(3):78- 81.LIU Ronghua,GAO Yuefei,LIU Huiliang,et al.Effect of gyroscopic moment on dynamic characteristics of Gatling weapon[J].Journal of Gun Launch&Control,2010(3):78- 81.(in Chinese)
[5]米中贺,王毅,李占旗,等.转管武器炮膛合力在ADAMS中的实现方法[J].火炮发射与控制学报,2011(4):46- 49.MI Zhonghe,WANG Yi,LI Zhanqi,et al.Realiztion method of Gatling gun bore resultant force based on ADAMS software[J].Journal of Gun Launch&Control,2011(4):46- 49.(in Chinese)
[6]刘杰,李强,周强.转管武器炮膛合力施加方法研究[J].火炮发射与控制学报,2013(2):38- 41.LIU Jie,LI Qiang,ZHOU Qiang.Loading method research of Gatling gun bore resultant force[J].Journal of Gun Launch&Control,2013(2):38- 41.(in Chinese)
[7]金志明.枪炮内弹道学[M].北京:北京理工大学出版社,2004:110- 117.JIN Zhiming.Gun interior ballistics[M].Beijing:Beijing Institute of Technology Press,2004:110- 117.(in Chinese)
[8]王亚平,徐诚,王永娟,等.火炮与自动武器动力学[M].北京:北京理工大学出版社,2014:114- 115,164- 165.WANG Yaping XU Cheng,WANG Yongjuan,et al.Dynamics of artillery and automatic weapons[M].Beijing:Beijing Institute of Technology Press,2014:114-115,164- 165.(in Chinese)
[9]李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社,2010:257- 275.LI Zenggang.ADAMS introduction and example[M].Beijing:National Defense Industry Press,2010:257-275.(in Chinese)
Loading Method of Gatling Gun Breeeh Foree in Virtual Prototype
HUA Binbin1,WANG Ruilin1,WANG Yujian2,SUN Yezun3,LI Xinqiang4
(1.Department of Artillery Engineering,Ordnance Engineering College,Shijiazhuang 050003,Hebei,China;2.The Demonstration and Research Institute of Small Arms,Beijing 102202,China;3.Military Representative Office in the 247 Factory,Taiyuan 030009,Shanxi,China;4.The 73121 Troop of PLA,Fuzhou 350000,Fujian,China)
Gatling gun;breech force;virtual prototype
TJ25
A
1673-6524(2015)04-0009-04
2014- 11- 11;
2015- 05- 17
化斌斌(1987-),男,博士研究生,主要从事武器结构动力学理论与应用研究。E-mail:huabin1104@163.com
Abstraet:According to the working theory and movement characteristics of Gatling gun,accurate application of breech force under different firing conditions was realized by using ADAMS functions and sensors comprehensively in the process of building virtual prototype model of Gatling gun.This method is current and is equally suitable for outer-energy Gatling gun and inner-energy Gatling gun.The simulation result indicates that the application of this method makes Gatling gun more compatible to the actual movement situation.
猜你喜欢
小学生学习指导(小军迷联盟)(2021年10期)2021-12-06
小哥白尼(军事科学)(2021年6期)2021-11-02
陕西画报(2021年1期)2021-04-22
甘肃教育(2020年17期)2020-10-28
小学生学习指导(小军迷联盟)(2020年9期)2020-10-14
小哥白尼(军事科学)(2020年3期)2020-07-27
当代工人(2019年11期)2019-07-10
轻兵器(2018年3期)2018-04-03
中国火炬(2014年3期)2014-07-24
轻兵器(2009年24期)2009-12-15