通过PLC优化提升绞车参数实现效益最大化
2015-07-18 09:56管京城陆远新淮南矿业集团朱集东煤矿安徽淮南232001
中国新技术新产品 2015年14期
管京城 陆远新 柏 乐(淮南矿业集团朱集东煤矿,安徽 淮南 232001)
通过PLC优化提升绞车参数实现效益最大化
管京城陆远新柏乐
(淮南矿业集团朱集东煤矿,安徽淮南232001)
摘要:本文通过缩短提升绞车爬行距离,优化提升速度来减少副井和矸石井的单勾运转时间,确保了副井和矸石井的提升要求,同时修正了相关程序保证了副井单双罐8m/s速度时易报超速跳车的问题,确保了副井单双罐可以在8m/s的速度下稳定安全的运行。
关键词:煤矿提升;爬行距离;提升速度;PLC程序
一、概述
淮南矿业集团朱集东矿井,设计生产能力400万t/a,目前有副井、主井、矸石井三套永久提升系统,朱集矿副井主要担负整个矿井人员提升及物料打运的工作,其绞车采用电枢换向的直流可逆调速系统拖动。随着朱集矿井生产任务的紧张,根据我矿根据现场实际需要,所有矸石不再从主井提升,全部从副井及矸石井提升,为满足副井和矸石井的提升量的要求,通过缩短提升绞车爬行距离,优化提升速度来减少副井和矸石井的单勾运转时间,确保了副井和矸石井的提升要求,同时修正了相关程序,保证了副井单双罐8m/s速度时易报超速跳车的问题,确保了副井单双罐可以在8m/s的速度下稳定安全的运行。
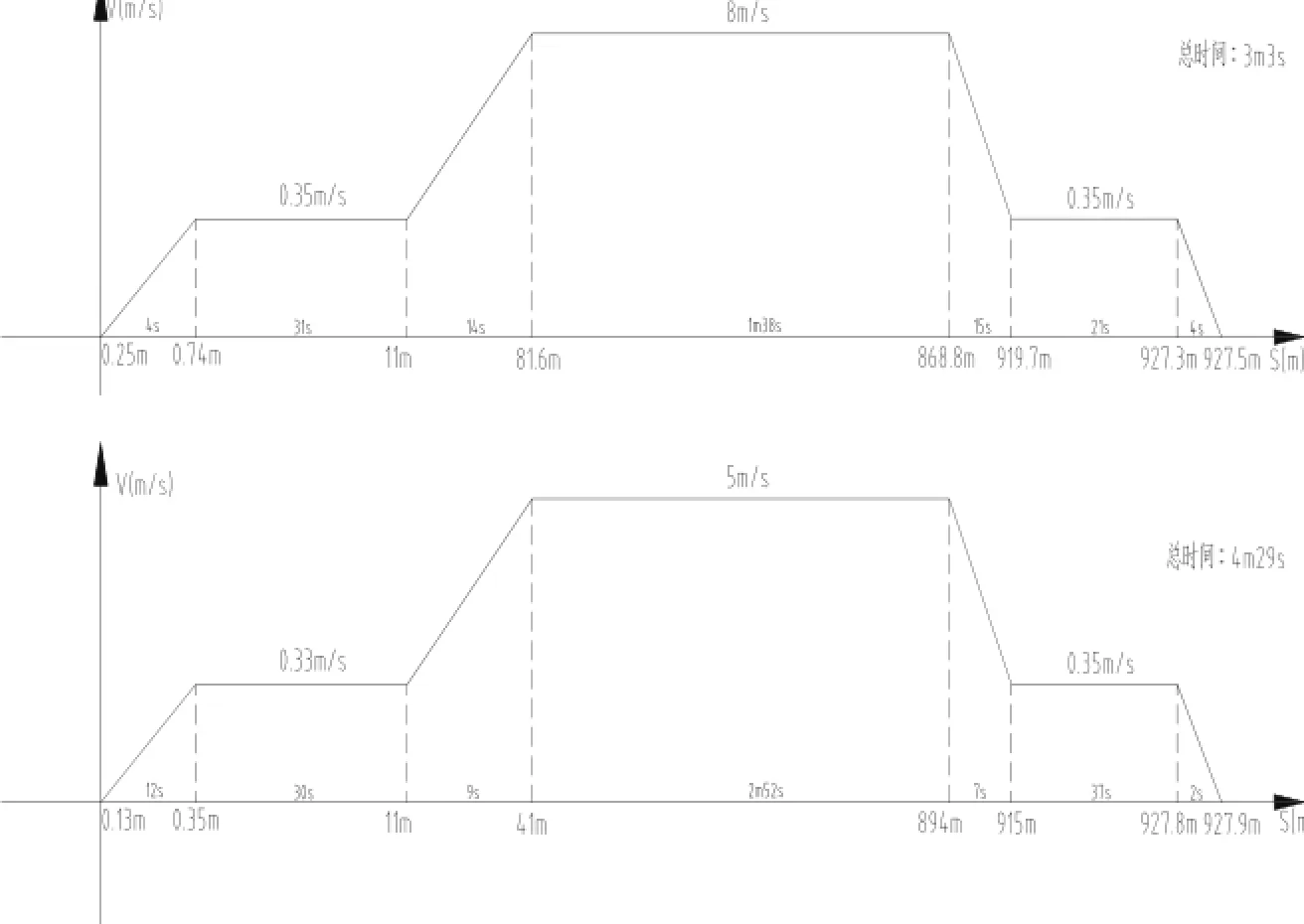
图2
二、具体方法及实现的效果图
由于副井及矸石井使用为双PLC冗余控制,主要通过传动C30控制系统进行行程控制,西门子的step7进行监控。因此想要缩短爬行距离需要对这两个PLC都进行修改达到现场实际的匹配要求。
1对C30系统的修改
(1)对PARAMETERS中PDSpS1及PDSpV1软硬件减速点的修改由-67.0改为-61.0,主要是通过增加8m/s匀速段的运行时间来达到减少爬行段的目的。
具体的修改方法如图1所示。
(2)两米监视点超速保护程序中,涉及到绞车在原来监视点位置的时候,速度可能大于2m/s,会造成两米监视点超速保护报警引起紧停。故做以下修改:
IF(DownRunAND/*S2*/AV_POS_ Cage1>-11.00(原来-17.00)
ORUpRunAND/*X2*/AV_POS_ Cage2>-11.00)AND
((AbAv_VL>SpOver2m)/*OR(AbAv_VLF>SpOver2m)*/)
OR(DownRunANDS2 ORUpRunANDX2)AND
((AbAv_VL> PSD2))
THENOverSp2m=1;
ELSEOverSp2m=0;
ENDIF
(3)Step7中有关150m超速的修改
原来在程序中做了一个在圆弧段减速保护的程序,由于减速点的变动,速度在现在的位置要比原来的大,因此依据现场实际的走勾速度图,进而通过修改step7中的超速保护程序段中的70m及40m超速保护的设定值改为7.2m/s及6.3m/s。彻底解决了绞车在原来高速运行时容易造成150m超速紧停的安全隐患。
2绞车运行曲线比较分析(以单罐为例)
如图2所示可以比较得出,单勾运行时间由4分29秒缩短到3分3秒,较少单勾运行时间1分26秒。
结语
通过对副井爬行距离和速度的的修改,副井每台绞车单勾提升时间缩短1 分26s,矸石井绞车单勾缩短提升时间25秒。按照副井单双罐平均每天走勾量大概1500勾,矸石井平均每天走勾量大概1100勾计算,这样的话副井、矸石井每年可以多提30660勾,极大的缓解了车皮供应及矸石提升的压力,大大减少了提人交窑的时间为副井日常检修和生产提供了宝贵的时间,也节约了每钩交窑的时间,节约了用电量。同时通过对高速运行程序的修改,彻底的解决了高速运行时超速紧停的安全隐患。
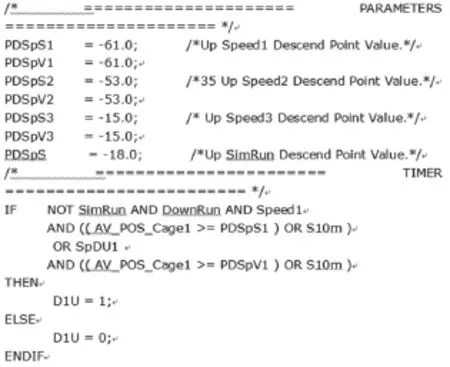
图1
参考文献
[1]廖常初.可编程控制器基础及应用[M].北京:机械工业出版社,2003.
中图分类号:TD53
文献标识码:A