基于ADAMS和MATLAB主动转向式汽车列车转向仿真研究
2015-07-07 22:30刘朝涛王永伟谭亚红
科技与创新 2015年10期
刘朝涛 王永伟 谭亚红

摘 要:为了降低汽车列车转弯半径和行驶轨迹良好的跟随性,可增加挂车的数量。基于汽车列弯路转向理论,运用ADAMS建立了列车运动学、动力学模型,运用MATLABL建立了列车转向控制模型,进行了ADAMS与MATLAB的联合仿真,并对主动转向汽车列车的可行性、优越性进行了验证。
关键词:汽车列车;ADAMS;MATLAB;联合仿真分析
中图分类号:U469.5+4 文献标识码:A DOI:10.15913/j.cnki.kjycx.2015.10.009
主动转向汽车列车是通过在牵引车与挂车之间建立通讯网络(牵引车与挂车、挂车与挂车之间由2根液压杆连接),将牵引车的运动参数,特别是转向数据通过通讯网络传送到各个挂车,各个挂车根据这些参数控制2根液压杆的伸缩长度,实现主动控制运动方式,能对牵引车的轨迹进行跟踪,从而提高列车挂车的追随性。
目前,汽车列车的长度较短,比如全挂汽车列车的挂车数一般不宜超过2辆,汽车列车都是由牵引车牵引和控制的,挂车被动地跟随牵引车运动。在转向时,挂车在牵引连接装置的带动下被动地跟随牵引车转向,导致整车的转向半径过大,在狭窄路面转弯和绕过障碍物时易发生刮碰事故,且挂车的追随性差。
通过全挂汽车列车的转向跟随性和转向特性,可得到列车转弯时具有良好跟随性的充分必要条件,并根据这一理论建立控制系统。本文运用ADAMS建立主动转向汽车列车的虚拟样机模型,运用MATLAB建立控制系统,通过ADAMS与MATLAB的联合仿真分析研究主动转向汽车列车跟随性和转弯半径方面的优越性。
1 汽车列车的转向分析
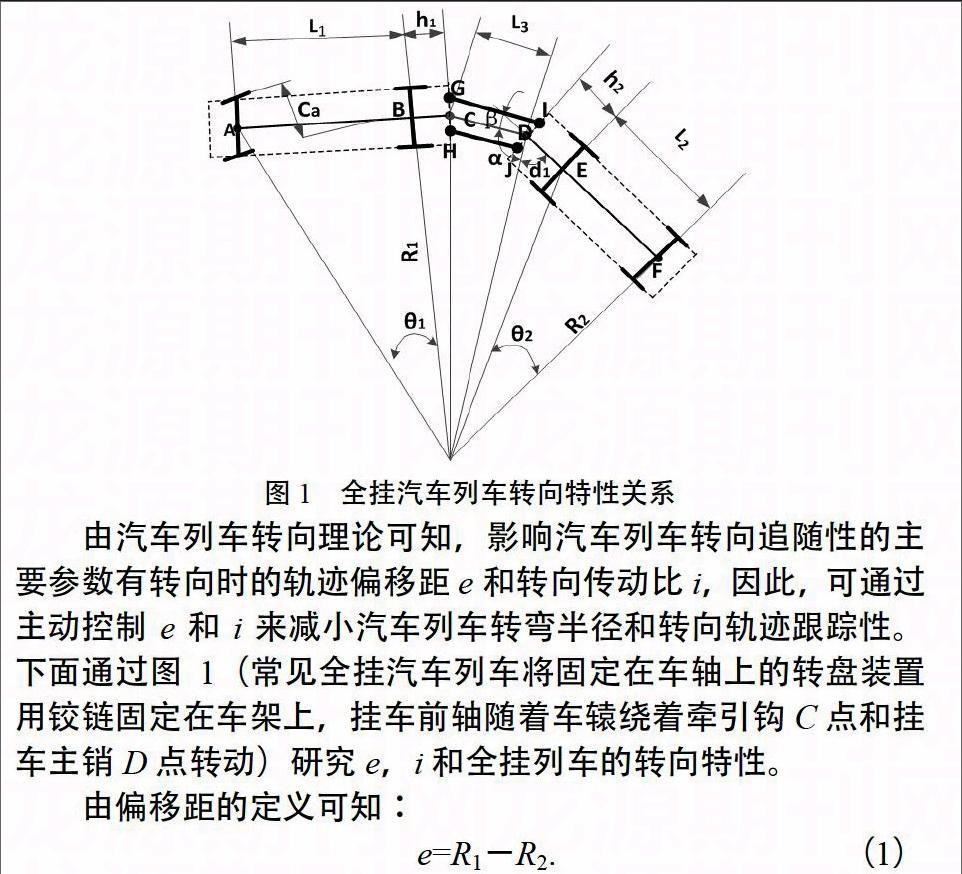
图1 全挂汽车列车转向特性关系
由汽车列车转向理论可知,影响汽车列车转向追随性的主要参数有转向时的轨迹偏移距e和转向传动比i,因此,可通过主动控制e和i来减小汽车列车转弯半径和转向轨迹跟踪性。下面通过图1(常见全挂汽车列车将固定在车轴上的转盘装置用铰链固定在车架上,挂车前轴随着车辕绕着牵引钩C点和挂车主销D点转动)研究e,i和全挂列车的转向特性。
由偏移距的定义可知:
由转向传动比定义可知:
全挂列车的转向特性表达式为:
由于式(3)中的i只与列车本身结构有关,一旦列车结构确定,则它为一定常数。因此,挂车具有良好的转向跟随性的必要充分条件为:e=0,即由式(1)可得R1=R2.
将式(4)代入式(3)可得到具有良好跟随性全挂汽车列的转向特性表达式: (6)
然而,当列车转弯时,挂车转向角θ2会随车辕与拉杆而变化,即:
. (7)
将式(6)代入式(7)可得到:
经过上述推论可得到通过牵引车转弯时的转弯半径,实时主动改变β满足式(9)就能得到列车转弯时良好的跟随性。主动转向汽车列车就是通过牵引车转弯时的参数采用控制算法控制连接各个挂车的2根液压杆伸缩变化,进而主动改变β的,最终实现挂车随牵引车主动转向。
2 主动转向汽车列车的控制算法
通过上述分析,只要汽车列车在转弯时转弯半径是固定的,通过控制系统改变β,使其满足式(9),则能达到汽车列车转弯时良好的跟随性,进而减小转弯半径。牵引车转弯半径与转向内外轮速度差有对应关系,通过传感器测到列车转弯时的转向内、外轮速度,可计算出速度差,并作为反馈值。将反馈值与给定输入量比较,通过PID控制算法跟踪输入信号控制液压杆的伸缩,从而达到主动控制目的。
3 建立虚拟样机模型和联合仿真模型
在ADAMS中建立汽车列车虚拟样机,在MATLAB 中建立控制模块并进行联合仿真。
3.1 在ADAMS/View中建立汽车列车模型
根据《道路车辆外廓尺寸》(GB 1589—2004)创建三维几何模型,简化后的几何模型包括车厢、轮胎、悬架和链接液压杆,主要参数如表1所示。
对模型添加约束:车辆与悬架之间添加固定副,车轮与车轴之间使用旋转副,液压杆与活塞杆之间使用滑移副,液压杆与挂车之间使用球铰副。为了便于研究,假定列车以某一恒定速度转弯,忽略转弯侧滑现象,对牵引车施加牵引力函数STEP(time,0,0,2.5,4.9E+5)+STEP(time,2.5,4.9E+5,3.1,-4.835e+005),转向力矩值2E+5.建立完成的主动转向汽车列车虚拟样机如图2所示。
3.2 控制系统建模分析
为了能及时反馈牵引车转向特性参数,消除列车转弯受到的干扰,采取了闭环控制系统。假定列车在恒定速度下转弯时牵引车在某同一转弯半径下转向内外轮的速度差为定值,通过传感器测量转内、外轮的速度作为MATLAB/Simulink中控制系统的输入值,以实现控制。
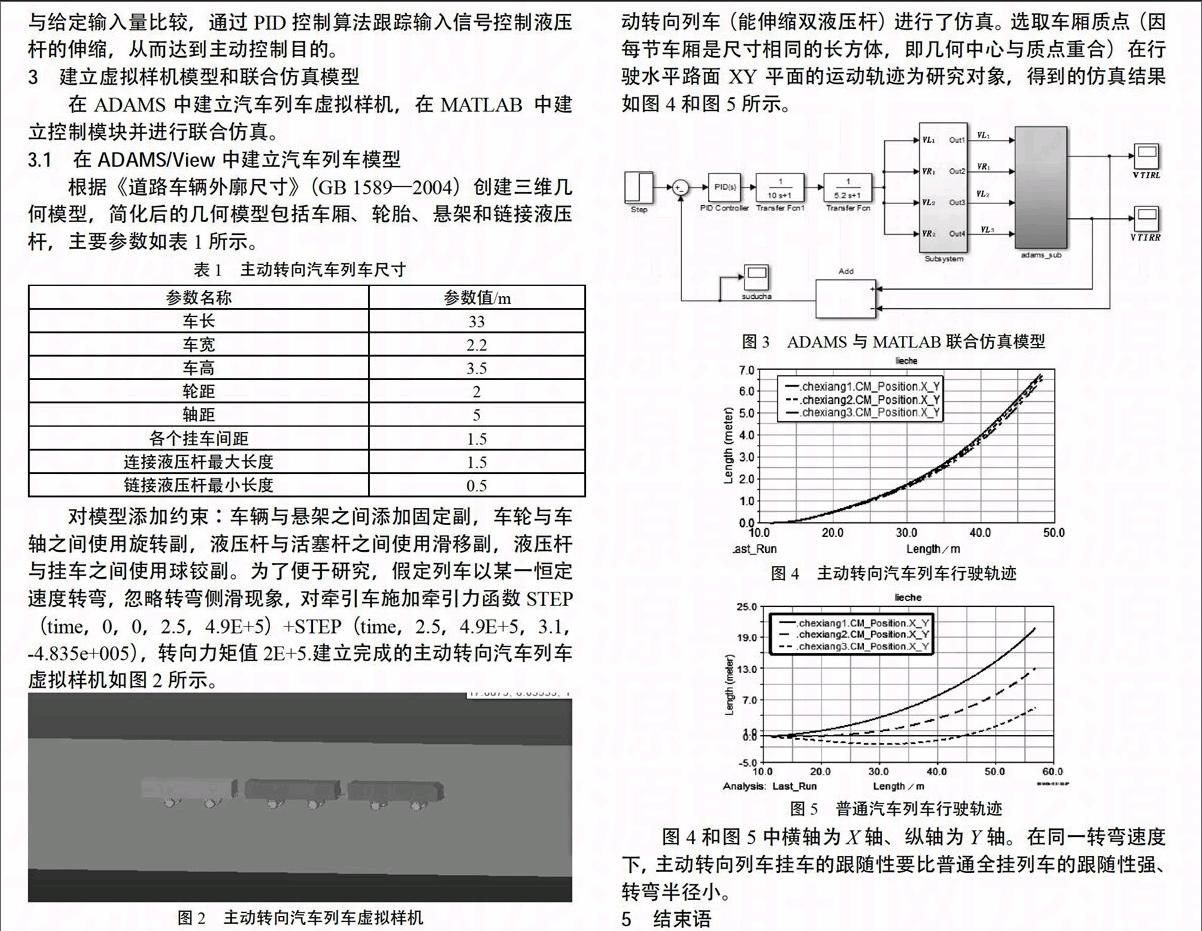
3.3 联合仿真接口参数设置
分别创建液压杆的伸缩速度为VL1、VR1、VL2、VR2,并作为输入状态变量,转向轮左、右速度TIRL、TIRR为输出状态变量,使状态变量与模型相关并导入目标软件MATLAB。在MATLABL命令窗口输入adams_sys生成adams_sub模块,对该模块添加已建立好的控制模块。此时,控制系统与机械系统已联合,如图3所示。
4 仿真比较和结果分析
为了更好地说明主动转向列车轨迹的跟随性,在相同列车结构参数和转向运动参数下分别对普通(单链接牵引杆)和主
动转向列车(能伸缩双液压杆)进行了仿真。选取车厢质点(因每节车厢是尺寸相同的长方体,即几何中心与质点重合)在行驶水平路面XY平面的运动轨迹为研究对象,得到的仿真结果如图4和图5所示。
图4和图5中横轴为X轴、纵轴为Y轴。在同一转弯速度下,主动转向列车挂车的跟随性要比普通全挂列车的跟随性强、转弯半径小。
5 结束语
通过以上分析和仿真研究验证双液压杆牵引连接的主动转向汽车列车的可行性,并在列车转向时挂车的跟随性和减小列车的转弯半径方面的优越性。
参考文献
[1]于永成.汽车列车的发展及其应用[J].公路交通科技,1984(2):56-61
[2]蔡世芳.结构和使用参数对半挂汽车列车操纵稳定性的影响[J].汽车运输研究,1988(8):75-96.
[3]赵贺强,张伟.汽车列车的组合形式及应用[J].专用汽车,2002(2).
[4]林熊熊.全挂汽车列车弯路运动轨迹计算仿真[J].汽车工程,1998,20(5).
[5]周国光.全挂汽车列车的转向跟随性与转向特性[J].专用汽车,1985(04):7-12.
〔编辑:张思楠〕