脉冲测量雷达记忆跟踪功能优化研究
2015-07-01 07:49魏明山钟水和郑国毅
兵器装备工程学报 2015年10期
魏明山,钟水和,郑国毅,张 路
(中国酒泉卫星发射中心,甘肃酒泉 732750)
随着战略战术导弹综合隐身技术、弹头欺骗技术、综合干扰技术、机动变轨技术等高新技术的应用[1],脉冲测量雷达接收下行应答信号或反射信号的强度和稳定性会产生一定程度的起伏、波动、甚至消失,严重时会导致脉冲测量雷达短暂丢失目标。
当出现下列情况时,均会影响到雷达的稳定跟踪[2]: 目标短时间内被遮挡,引起目标跟踪丢失或跟踪错误; 火箭一二级分离和导弹一级关机,引起应答机遥测信号短暂消失,反射信号出现起伏和畸变; 弹头突防时有源无源干扰、低仰角时的地面杂波,引起目标识别困难等。在雷达跟踪丢失目标时,能否正常稳定的跟踪,如何应用已知的目标运动轨迹推算出之后有限时间内的目标轨迹,即记忆跟踪功能,是脉冲测量雷达不可缺少的功能。
脉冲测量雷达具有记忆跟踪功能,但是在实际使用过程中存在一些问题。本文介绍了记忆跟踪功能中目标运动轨迹外推的三种算法,并根据脉冲测量雷达靶场应用实际,提出了具体的优化方案,取得了较好的效果,确保了航天和武器试验任务的圆满完成。
1 记忆跟踪功能
某脉冲测量雷达具有S 频段角度、C 相参应答式和反射式跟踪测量功能[5,8-9]。它采用S/C 双频段馈源共面设计,捕获过程共分三步:一是用波束宽度为1° 的S 频段角度捕获目标,使目标进入波束宽度为0.4° 的C 频段波束范围内;二是C 频段距离捕获目标,使C 频段距离偏移量保持较小的范围;三是C 频段角度捕获目标。S 频段角度捕获、C 频段距离捕获和C 频段角度捕获均包含有记忆跟踪功能。脉冲测量雷达采用偏差量跟踪,实时测量目标相对于雷达电轴的偏差量Δx,Δy,通过PID 方式调节,实现对设备方位、俯仰两个方向的控制,使得偏差量趋向于零,从而实现对目标的动态闭环自跟踪[3]。记忆跟踪功能是为解决测量设备自跟踪过程中,由于出现短暂无法实时测量目标偏差量,导致无法实时自动跟踪的功能。
记忆跟踪功能需要根据目标失锁前的跟踪数据,采用时序控制逻辑、目标航迹或伺服驱动电压平滑外推等滤波方法实现目标航迹或伺服驱动电压滤波与外推,计算出记忆跟踪时的目标位置、速度或伺服驱动电压、电流等参数,引导设备稳定跟踪目标。
1.1 传统时序控制逻辑算法
传统时序控制逻辑算法按照时间顺序主要分4 个阶段。在自跟踪状态下随时缓存有限长(长度为N)目标跟踪数据,为进入记忆跟踪做好准备; 当满足前次跟踪状态为自跟踪、前期目标跟踪数据足够长(M≥N)、目标跟踪丢失等条件,进入记忆跟踪状态;在记忆跟踪过程中,采用插值外推目标轨迹,引导目标跟踪;在记忆跟踪时间(t <P)内,若满足自跟踪条件,则重新转入自跟踪;在记忆跟踪时间结束(t≥P)后,若不满足自跟踪条件,则转入数引。传统时序控制逻辑算法时序图如图1 所示。
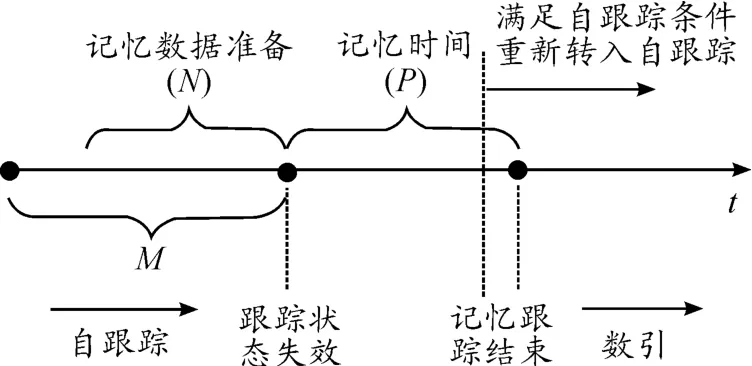
图1 传统时序控制逻辑算法时序
1.2 目标航迹平滑外推算法
目标航迹平滑外推算法主要应用于带限速保护和限位保护功能的大型天线。常用的外推算法有拉格朗日插值外推算法、速度加速度外推算法、最小二乘外推算法等。
1)拉格朗日插值外推算法。传统记忆跟踪算法采用拉格朗日插值法[2,4]。目标坐标(xi,yi),x 代表方位,y 代表俯仰。以x 为例,函数x = f (a)的n + 1 个节点为a0,a1,…,an。a 代表时间,对插值区域间内的任何一点函数值,可用拉格朗日多项式计算:

其中,li插值函数,n 为阶数。
2)速度加速度外推算法。速度加速度外推算法根据匀加速运动距离计算公式演变而来,从有限长数据中求出平均速度和加速度,进行位置信息外推[10]。
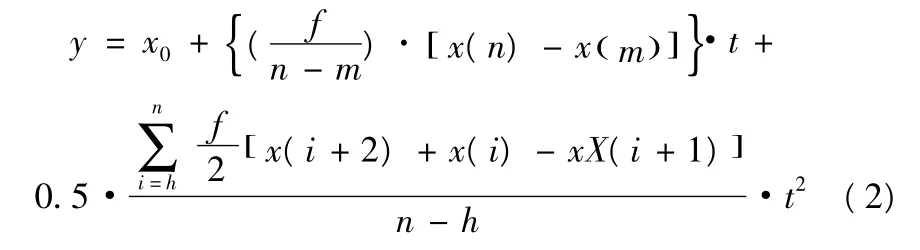
其中,x0为当前位置,y 为外推位置,x(n)为有限长数据第n个值,x(m)为记忆数据第m 个值,n、m、h 为整数。
3)最小二乘外推算法。最小二乘外推算法能够较好的实现数据平滑外推[3]。以方位角为例,根据最小二乘法原理可求出,tk时刻目标方位角和方位角速度估计值如下
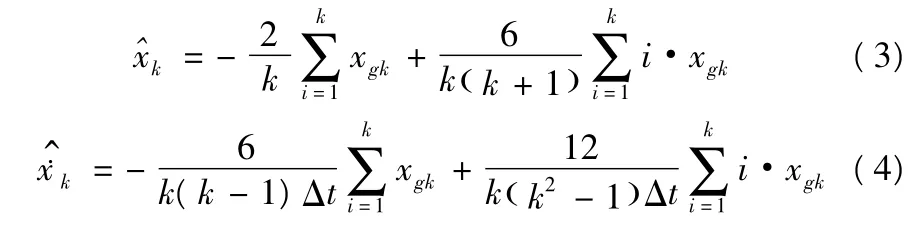
假设目标作匀速直线运动,可以求出tk+1时刻位置
1.3 伺服驱动电压平滑外推算法
伺服驱动电压平滑外推算法[7]即平滑外推驱动电压,保持原有的跟踪状态,使记忆跟踪内的测量数据仍然有效。主要应用于测量定位设备、角度无限位设备,高伺服性能测量设备等。
Overlying strata crack evolution law research on the “three soft” coal seam mining protective layer
1)时序平滑外推算法。时间序列平滑外推算法是指用平均的方法,把序列中的波动剔除掉,使序列变得比较平滑,以反映其基本轨迹,并采用一定的模型进行预测。简单时间序列平滑法是用简单平均数进行预测,即:

2)尾点保持外推算法。尾点保持外推算法以偏差量跟踪方式为例。采用的PID 控制方式如下:

其中,k 为采样序号,k = 0,1,2,…;kp、ki、kd分别表示比例、积分、微分系数。U(k)采样时刻k 输出值,e(k)、e(k -1)为采样时刻k、k -1 的偏移量。尾点保持外推,就是将当前e(k)偏移量置零,即:

2 记忆跟踪功能优化
脉冲测量雷达的记忆跟踪功能自应用以来,经过多次试验任务的验证,存在记忆跟踪判决门限不当、双重记忆配合不当和跟踪方式切换未用记忆跟踪功能等问题。下面将分别阐述适应性优化方案。
2.1 记忆跟踪判决门限设计不当问题
脉冲测量雷达在导弹分离时,接收的S 频段遥测信号会闪烁失锁,其锁定信号时序如图2 所示。
图2 导弹分离时遥测信号锁定时序
如果目标信号出现类似图2 中的闪烁失锁情况,由于S频段角度记忆跟踪功能采用传统时序控制逻辑和时序平滑外推算法,存在以记忆准备数据(N >5)为进入记忆跟踪的条件,存在多次闪烁失锁使得S 频段角度重复进入记忆功能,但由于记忆准备数据不够长,如图2 中的0.5 ~1 s,会导致记忆跟踪失效。
根据导弹分离时遥测信号的闪烁失锁情况,将原有记忆跟踪功能时序关系进行优化,如图3 所示。
图3 S 频段角度记忆跟踪时序控制优化示意图
优化方案有三点: 一是将记忆数据准备时间由原来的5 s更改为0.5 s;二是将记忆跟踪条件由3 条更改为2 条,省略记忆数据准备大于5 s 的要求,以适应导弹分离信号闪烁失锁设备仍能进入记忆跟踪; 三是将记忆时间由原来的2 s更改为5 s,以适应导弹分离信号失锁时间长度。
图4 S 引导记忆跟踪优化前后效果图
2.2 双重记忆配合设计不当问题
脉冲测量雷达采用单脉冲测角体制,方位、俯仰角度误差电压计算公式为
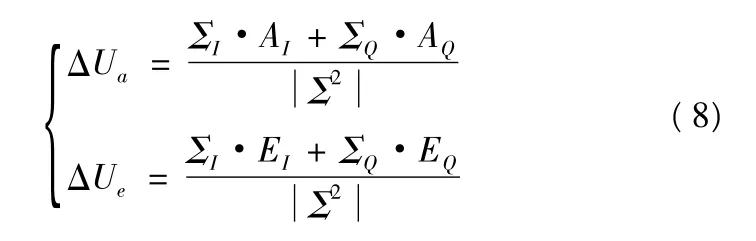
距离跟踪提取的I、Q 距离波门数据AI、AQ、EI、EQ,根据上式得到C 频段方位俯仰误差电压ΔUa和ΔUe,引导C 频段角度跟踪目标。距离波门数据是计算角度误差电压的重要数据源,会影响角度跟踪。
脉冲测量雷达C 频段自跟踪包含C 频段距离跟踪和C频段角度跟踪。当C 频段信号失锁后,脉冲测量雷达先进入距离记忆跟踪,后进入角度记忆跟踪。记忆跟踪功能采用双重记忆时序控制结构和尾点保持外推算法,存在距离记忆跟踪后,距离偏移量仍然被提取应用,天线受不正确数据控制,出现振荡,严重时导致目标丢失(图5)。
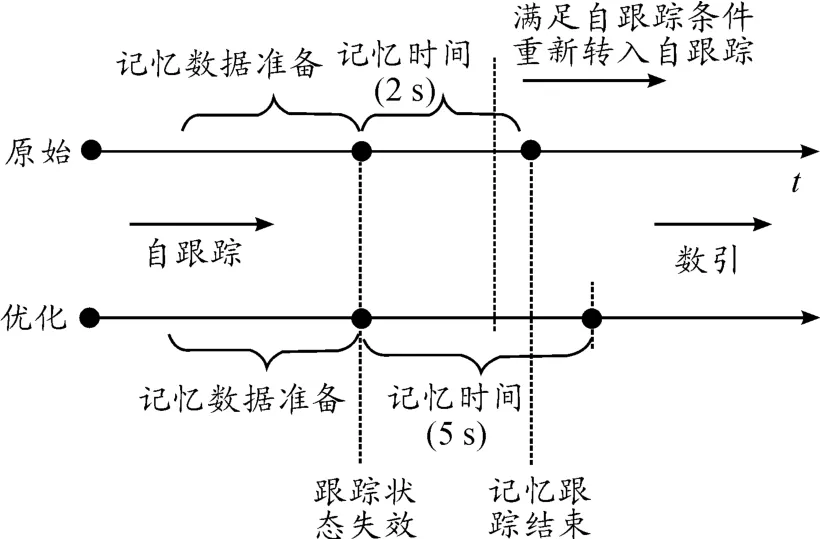
图5 C 频段距离记忆跟踪时序控制优化示意图
优化方案有二点:一是将记忆跟踪时距离偏移量强制置零,避免错误的距离偏移量影响角度跟踪; 二是将记忆时间由原来的2 s 更改为5 s,以适应导弹分离信号失锁时间长度。
C 频段距离记忆跟踪优化前后效果如图6 所示。在图6(a)中,C 频段距离记忆跟踪实时提取距离偏移量,但此偏移量不是正确的,导致跟踪时天线出现晃动,不能稳定跟踪。经过优化后,天线能够稳定跟踪,如图6(b)所示。
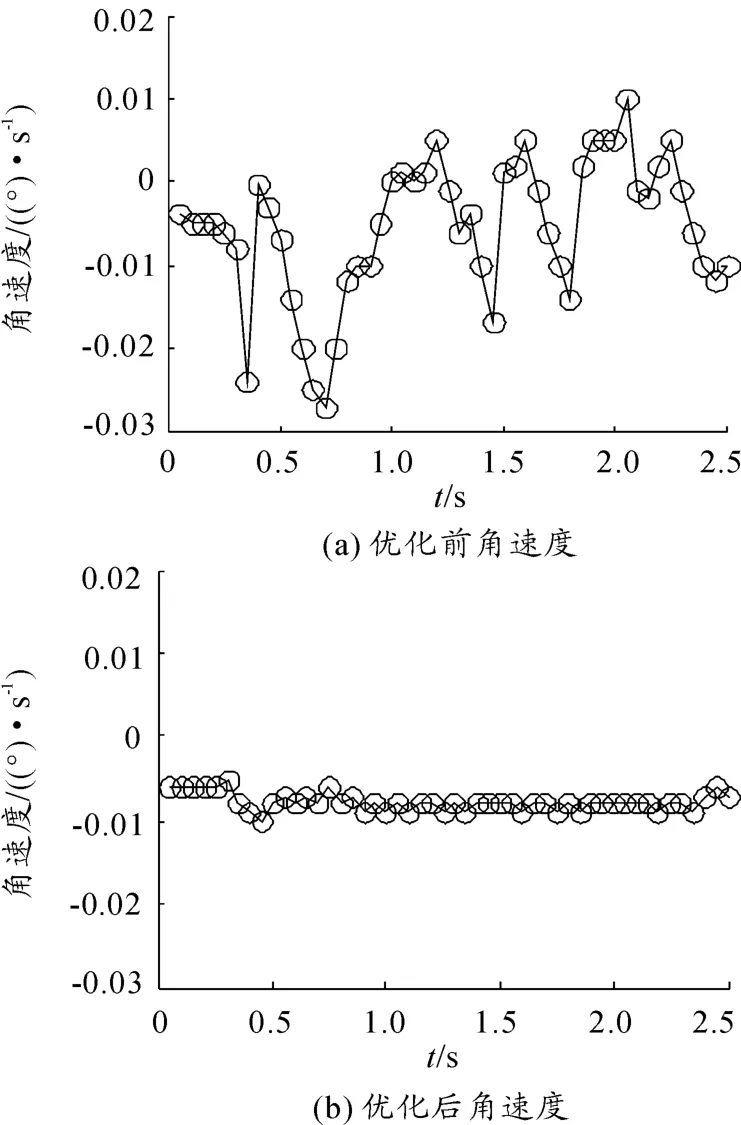
图6 C 频段距离记忆跟踪优化前后效果图
2.3 S 频段和C 频段自跟踪切换的阶跃问题
脉冲测量雷达目标捕获过程中,当S 频段角度和C 频段距离捕获目标后,转切C 频段角度自跟踪,实现脉冲测量雷达由S 频段引导宽波束到C 频段跟踪窄波束的切换。在S频段角度向C 频段角度自跟踪切换的过程中,先将S 频段角度和C 频段角度跟踪的PID 调节器的输入变量(偏移量)和输出变量(驱动电压)清零,后进入C 频段角度跟踪的PID 调节的输入变量和输出变量。自跟踪切换过程相当于系统输入端加一阶跃信号,系统输出达到稳态的过程,存在阶跃变化导致跟踪方式切换不平稳。C 频段角度跟踪向S 频段角度自跟踪也是类似的。
优化方案如图7 所示。当进行S 频段角度和C 频段自跟踪切换时,判断上次和当前工作方式是S 频段跟踪还是C频段跟踪,然后将当前工作方式PID 调节器的输入变量(偏移量)和输出变量(驱动电压)清零,上次工作方式PID 调节器的输入变量和输出变量传递给当前工作方式PID 调节器,最后除当前工作方式外的所有PID 调节器的输入变量和输出变量清零。
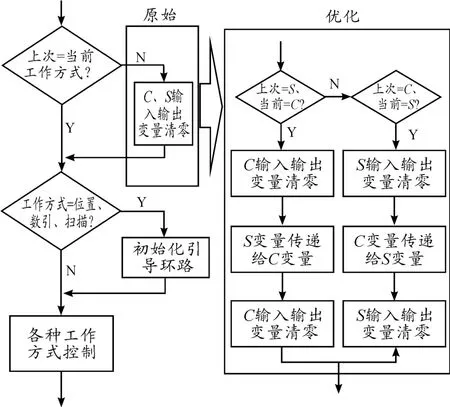
图7 ACU 核心控制流程优化
跟踪方式切换优化效果图如图8 所示。在图8(a)中,在0 s 时进行自跟踪方式切换,由于PID 调节器过程变量清零突变存在阶跃相应,天线出现阶跃振荡,容易丢失目标。经过优化后,天线能够完成跟踪方式的平稳切换,达到稳定跟踪的目的。如图8(b)所示。
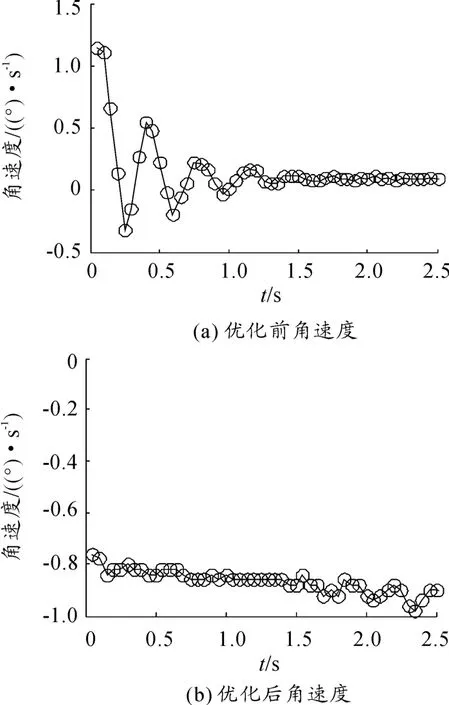
图8 跟踪方式切换优化前后效果图
3 结束语
记忆跟踪功能是用于解决目标偏差量无法实时测量而导致无法跟踪目标的一种跟踪技术。它在正常跟踪过程中虽然使用的时间较短,但其影响较大,很好解决了脉冲测量雷达目标遮挡、火箭一二级分离、导弹一级关机和弹头突防等带来的跟踪不稳定、容易丢失目标的问题。通过研究记忆跟踪功能的多种算法,结合脉冲测量雷达靶场应用实际,对记忆跟踪功能进行适应性的优化研究,获取了较好的实际效果,有效提高了脉冲测量雷达完成试验任务的能力。
[1]胡波,李壮.国外弹道导弹突防的关键技术与发展[J].战术导弹技术,2010(2):124-128.
[2]李强,崔岩.切比雪夫多项式在单台经纬仪记忆跟踪中的应用[J].激光与光电子学进展,2013(4):169-173.
[3]沈永良,徐亚飞.舰载平台下的光电跟踪技术[J].火力与指挥控制,2008,33(7):13-15.
[4]李征航,黄劲松.GPS 测量与数据处理[M].武汉:武汉大学出版社,2005.
[5]陈大庆,胡周礼,王雷,等.大功率脉冲测量雷达跟踪捕获方案优化设计[J].导弹试验技术,2012(1):45-47.
[6]陈付彬,孙洪忠,张军.记忆跟踪在HPRF-PD 雷达中抗距离遮挡的应用[J].制导与引信,2008,29(3):42-47.
[7]鲁尽义.航天测控系统测角分系统[M].西安:中国电子科技集团公司第三十九研究所,2008.
[8]赵业福. 无线电跟踪测量[M]. 北京: 国防工业出版社,2003.
[9]Merrill.Skolnik.雷达手册[M].2 版.王军,等,译.北京:电子工业出版社,2003.
[10]丁鹭飞,耿富录.雷达原理[M].西安:西安电子科技大学出版社,2000.
猜你喜欢
导航定位学报(2022年5期)2022-10-13
小猕猴智力画刊(2022年3期)2022-03-28
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
地震研究(2021年1期)2021-04-13
有色设备(2021年4期)2021-03-16
铁道建筑技术(2020年11期)2020-05-22
航天电子对抗(2019年4期)2019-12-04
电子制作(2017年13期)2017-12-15
北京航空航天大学学报(2017年10期)2017-04-20
CHIP新电脑(2016年3期)2016-03-10