
改进的三角高程测量法在桥梁施工中的应用
2015-06-29 10:36:35王敏贺婧
四川水泥 2015年1期
王 敏 贺 婧
(杨凌职业技术学院,陕西 杨凌 712100)
改进的三角高程测量法在桥梁施工中的应用
王 敏 贺 婧
(杨凌职业技术学院,陕西 杨凌 712100)
结合某特大桥施工的测量任务,介绍了免量仪器高、目标高的三角高程测量改进方法,采用该方法有效加快了工程进度,很大程度上提高了测量的精度,并可广泛应用于交通、矿业、水利、地质灾害评估、测绘等领域。
全站仪 三角高程测量 精度
高程测量是求出某点沿铅垂线方向到大地水准面的距离,用H表示,常用的高程测量方法有水准测量和三角高程测量。在工程实际中,经常会出现地形起伏变化大、相邻两测点间不通视、山区受地形条件限制等原因影响工程进度和测量精度。结合某特大桥的施工测量任务,介绍一种改进的三角高程测量法,通过全站仪免量仪高、目标高法,灵活选择安置仪器的位置进行高程测量。
1 工程概况
某特大桥跨越白龙江及依山修建的国道,位于左岸的一级阶地上。本桥梁孔跨布置形式为2(21-32m+1-56m),全长757.15m,并且位于R=4500m的圆曲线上,线间距5.0m~4.4m,桥台采用T性桥台,桥墩采用圆端形桥墩,基础采用钻孔桩基础和挖井基础,跨越采用1-56m系杆拱。
2 三角高程测量原理
2.1 对象观测法
在相邻两点间观测其竖直角,再根据这两点间的水平距离,应用三角函数关系计算出两点间的高差,进而推算出点的高程。原理如图1所示。
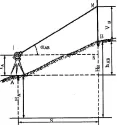
图1 三角高程测量原理
在地面上A、B两点间测定高差 错误!未找到引用源。,A点设置仪器,在B点竖立标尺。量取望远镜旋转轴中心I至地面点上A点的仪器高 错误!未找到引用源。,用望远镜中的十字丝的横丝照准B点标尺上的一点M,它距B点的高度称为目标高 错误!未找到引用源。,测出倾斜视线IM与水平视线IN间的竖角错误!未找到引用源。,若A与B之间的水平距离已知为S,则可得两点间的高差错误!未找到引用源。为:

则B点的高程为

在实际应用中上式要注意竖角的正负号,仰角为正,俯角为负。
以上是三角高程测量的基本公式,其中是以水平面为基准面,视线成直线为前提进行的,因此,只有当A、B两点间的距离较短时才会比较准确。当A、B两点间距离较远时,就必须考虑地球曲率与大气遮光对所测高差的影响。
从传统的三角高程测量法可以看出,全站仪必须假设在已知高程点上;要测出待定点的高程,必须量取仪器高和目标高。
2.2 免量仪高、目标高法三角高程测量
2.2 .1 免量仪高、目标高法基本原理:将全站仪任意置于一点,在不量取仪器高和目标高的情况下,让所选点与已知点通视,利用三角高程原理测出待测点的高程。
如图2所示,假设A点高程已知,B点高程未知,通过全站仪来测定其他待测点的高程。

图2 免量仪高、目标高法
首先由三角高程测量基本公式可知:

上式除了D tan a 即 t 的值可以用仪器直接测出外,i ,v 都是未知的。但有一点可以确定,即仪器一旦置好,i 值也将随之不变,同时选取对中杆作为反射棱镜,假定 v 值也固定不变。从(4-1) 可知:

2.2 .2 操作步骤
(1)、仪器任一置点,但所选点位要求能和已知高程点通视。
(2)、用仪器照准已知高程点,测出 t 的值,并算出W 的值(此时与仪器高程测定有关的常数如测站点高程,仪器高,棱镜高均为任一值,施测前不必设定) 。
(3)、将仪器测站点高程重新设定为W ,仪器高和棱镜高设为0即可。
(4)、照准待测点测出其高程。
3. 免量仪高、目标高法三角高程测量在桥梁施工中的应用
3.1 测量仪器的选用
采用LAICA TCR1201+及配套棱镜、LAICA DNA03电子数字水准仪及配套铟钢尺。TCR1201+型全站仪测角为精度1.0″,测距精度为±(1mm+1.5ppm);DNA03电子数字水准仪的精度是0.3mm。
3.2 测量方案及数据分析
3.2 .1 点位布设
本桥墩台与水准点位置如图3所示,本桥起始端有水准控制点CPI135、CPI136,中间有水准控制点G11-2,G12,共计四个控制点。
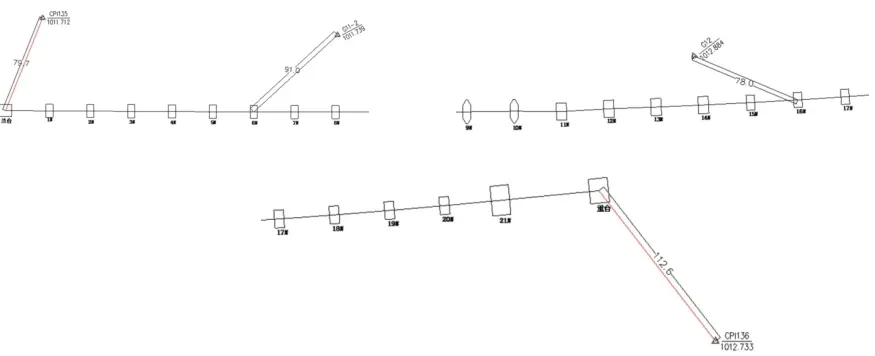
图3 白龙江某特大桥墩台与水准点位置图
3.2 .2 测量数据及处理
其高程是经过二等水准复核后的最新成果,高程数据如下:
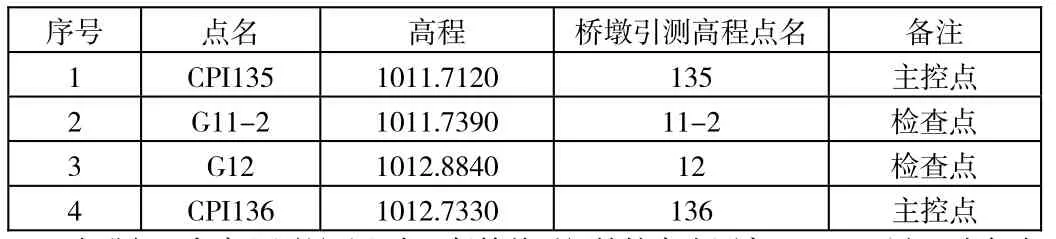
表1 白龙江某特大桥高程控制点
在进行三角高程测量过程中,保持前后视棱镜高为原高1.37m不变,在每次任意架站时不必量取仪高。记录时直接记录高差即可,观测三个测回取平均值,观测数据及成果如下分析:

表2 控制点CPI135三角高程测量数据处理
由此得出兰台引点135的高程为:
H(11-2)=1011.7120-(-0.7861)+2.6128=1015.1109m

表3 控制点G11-2三角高程测量数据处理
由此得出兰台引点11-2的高程为:
H(11-2)=1011.7390-(-0.2146)+4.2209=1016.1742m

表4 控制点G12三角高程测量数据处理
由此得出兰台引点12的高程为:H(12)=1012.8840-(-1.4681)+4.4745=1018.8265m

表5 控制点CPI136三角高程测量数据处理
由 此 得 出 兰 台 引 点 136的 高 程 为 :H(136)=1012.7330-(-1.7354)+5.7574=1020.2256m
3.2 .3 限差分析和数据分析
对比三角高程测量和二等水准测量成果得知,引测点的高程值均符合四等水准测量要求,可以采用。其对照表如下:

表6 引点三角高程与二等水准成果对照表
4. 结论与展望
采用全站仪免量仪高和棱镜高法测量高程,相邻两测点间可以不通视,可灵活选择安置仪器的位置,测站上仪器不需对中,不必量取仪器高,因而操作灵活、实用,尤其在山区受地形条件限制时能明显提高作业效率,节省测量时间并降低劳动强度。在测量方法和测量精度上要比全站仪对向观测法具有明显的优势,在一定范围内,其精度又可达到三四等水准测量的要求,如果采用适当的方法使前后视目标高相等,甚至还可以满足二等水准测量的精度要求。实践证明,免量仪高和棱镜高法为三角高程测量提供了一种快捷高效、高精度的实测方法。
[1]王知章等.三角高程测量在高铁特大桥无砟轨道施工测量中的应用[J].工程勘察.2009(6)
[2]徐亚明等.改进的三角高程法在跨海高程传递中的应用[J].测绘通报.2014(4)
U445
B
1007–6344(2015)01–0196–02
猜你喜欢
天水行政学院学报(2022年4期)2022-11-18 09:02:36
北京测绘(2020年12期)2020-12-29 01:37:18
少儿美术(快乐历史地理)(2020年4期)2020-02-24 13:06:28
工程与建设(2019年3期)2019-10-10 01:40:18
学苑创造·A版(2019年4期)2019-05-10 00:19:52
电测与仪表(2016年9期)2016-04-12 00:29:52
计量学报(2015年3期)2015-08-10 10:10:19
物理实验(2015年8期)2015-02-28 17:36:41
河南科技(2014年5期)2014-02-27 14:08:32
环球时报(2012-02-03)2012-02-03 11:04:46
