
城市轨道交通列车测速系统及算法比较研究
2015-06-28 11:42:58赵晓峰
城市轨道交通研究 2015年11期
赵晓峰
(上海富欣智能交通控制有限公司,201203,上海∥高级工程师)
城市轨道交通信号系统的列车测速功能是安全关键功能,列车测速的准度和精度直接关系到列车自动防护系统的安全性,这在移动闭塞制式的CBTC(基于通信的列车控制)信号系统中表现得尤为突出。
列车测速系统,作为信号系统车载子系统的重要组成部分,由速度采集设备、接口单元和主处理单元组成。其中,速度采集设备主要是各种类型的传感器,提供列车动力学信息的感知能力;接口单元负责与速度采集设备接口,进行原始数据处理;主处理单元负责运行整个测速算法,计算列车的实际速度,检测车轮打滑,并在一定条件下进行补偿。
1 速度采集设备
常用列车速度采集设备有车轮脉冲发生器(Wheel Impulse Generators,简为 WIG)、光脉冲发生器(Optical Pulse Generator,简为 OPG)、霍尔效应传感器(Hall-Effect Sensor,简为 HES)、多普勒雷达传感器(Doppler Radar Sensor,简为 DRS)、加速度计(Accelerometer,简为ACC)、全球导航卫星系统 (Global Navigation Satellites System,简 为GNSS)。
WIG 又称测速电机,属于无源接触式传感器,是城市轨道交通领域应用最早的速度采集设备,早在基于音频轨道电路的ATC(列车自动控制)系统时代就已经是车载信号系统的必配测速设备。WIG 安装在车轴轴端,不需要外接电源,当车轮转动时,联动杆带动内部转子切割磁力线,通过电磁感应产生电动势,感应电动势的频率与车轮转速成正比,经过频率-电压变换后,把转速变换为电压,通过测量电压的幅度得到列车实际速度。WIG 只在2000年以前开通线路的列车上有所应用,新建线路已不再使用。
OPG 属于有源接触式传感器,是目前应用最广泛的速度采集设备,主要由光电模块、光栅盘、传动轴等组成,常用类型是红外反射式。OPG 也是安装在车轴轴端,当车轮转动时,通过传动轴带动内部光栅盘旋转。光栅盘外边缘有2圈过孔,每圈过孔可以达到200个,并且可以通过控制过孔的长短来进行编码,因此有些信号厂商也称OPG 为编码里程计。OPG 工作时需要外接直流电源驱动内部红外发光二极管产生发射光,透过光栅盘过孔后在底面反射,然后由光敏管接收,转换为方波电压脉冲输出至信号主机。OPG 输出信号可以达到6路。由于存在机械转动磨损、光栅遮挡丢脉冲等现象,OPG只能用于时速低于140 km 的列车[1]。使用 OPG的信号厂商有阿尔斯通、卡斯柯、西门子、安萨尔多、北京交控。
HES属于有源非接触式传感器,与光脉冲发生器相比,体积更小、质量更轻,但是安装较为复杂,需要单独制造配套的测速齿轮和轴盖。测速齿轮属于机械件,安装在车轴轴端。轴盖是罩在齿轮外面,固定在转向架上。传感器安装在轴盖一侧的边缘,与齿轮保持1 mm 左右的间距。HES工作时需要外接直流电源。当列车运动时,测速齿轮与车轮一起转动,传感器利用霍尔效应检测到锯齿,并将其转换为电流信号输出至信号主机。HES输出信号一般只有2路。由于具备良好的防尘、防油、防脉冲丢失等特性,HES不仅在城市轨道交通领域有应用,而且特别适合时速高于180 km 的城际铁路列车[2]。
DRS是近几年引入的辅助检测车轮打滑的新型速度采集设备,主要由DSP(数字处理器)、检波整形器、混频器、高频振荡器、电磁波网络器、天线等组成。DRS安装在车下空间的车厢底部,天线朝向列车正向运行的方向。DRS工作时需要外接直流电源。当列车运行时,高频振荡器产生的24 GHz微波信号,大部分通过天线向外发射,小部分耦合到混频器中作为本振信号。发射信号经轨面反射后,再通过天线接收回到混频器,混频的结果是两个频率的差值,即多普勒频移,该频移正比于列车的运动速度;最后由DSP数字系统处理后通过串口发送至信号主机。微波信号的发射和接收回路通常为2路。DRS测速精度高,范围广,可以达到0.2~600 km/h。
ACC也是一种辅助检测车轮打滑的设备,主要由悬臂质量块、力矩马达、非接触位移传感器等组成,常用类型是力平衡伺服倾角式。ACC 安装在车内空间信号主机柜底部,工作时需要外接直流电源。悬臂质量块与力矩马达的电枢连接,初始处于平衡状态,当列车运动时,悬臂质量块离开原来的平衡位置,非接触位移传感器检测到该变化后,一方面激活力矩马达的线圈,产生一个反作用力,从而使悬臂质量块与力矩马达达到新的平衡;另一方面对外输出电压信号至信号主机。ACC输出信号只有1路。
GNSS是一种以卫星为基础的无线电导航系统,列车通过连续接收卫星发送的唯一编码序列,计算当前三维位置(经度、纬度和高度)、速度、方向和时间信息。GNSS主要应用于现代有轨电车信号系统的列车定位追踪,其实时测量的列车速度并未用于列车自动防护功能,而只是作为运营调度的参考数据。
2 列车测速系统配置
绝大多数情况下,列车测速系统的接口单元和主处理单元,即信号系统车载主机,在每列车的两端A1和A2各配置1套。每套车载信号主机均采用3取2架构,两端设备通过网络连接,并能够互为热备。个别信号厂商采用2取2架构,两端设备连接起来形成2乘2取2结构。
列车测速系统通常采用多传感器融合方式实现,在保证列车运行安全性和可用性的前提下,配置不同类型和数量的速度采集设备[3]。
表1汇总了城市轨道交通领域主流信号厂商的列车测速系统配置方案。按实现方式来划分,列车测速系统包括单端系统和双端系统。单端系统是指车载信号主机仅使用本端的速度采集设备即可实现测速功能的系统;双端系统是指车载信号主机需要使用本端和另一端的速度采集设备才可实现完整测速功能的系统。在双端系统中,另一端的速度信息是通过车载信号主机之间的车载网络传输。
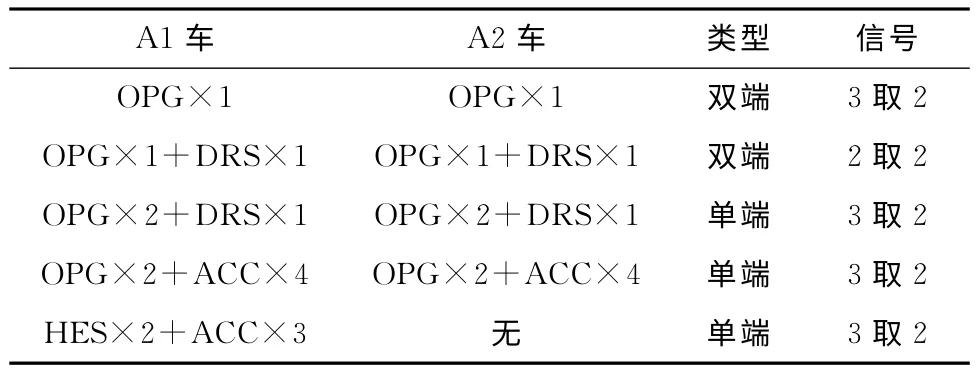
表1 列车测速系统配置表
速度采集设备的安装位置见图1(从车顶向下看),图中所示速度计可以是OPG 或HES。单端系统的2个速度计安装在一端车头的制动轴,且在车辆的两侧;双端系统的2个速度计分别安装在两端车头的制动轴,并且在列车的两侧。其他设备在A2端的安装方式与图1相同。
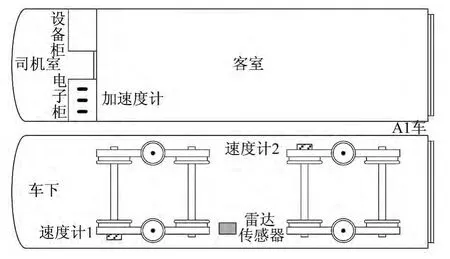
图1 速度采集设备安装示意图
图2描绘了3取2的车载信号主机与速度采集设备的连接关系。图2中所示速度计可以是OPG或HES。每一个速度计在连到接口单元后,都需要分成3路信号分别进入接口处理器1、2、3。雷达传感器的RS-485接口支持一主多从模式,因此也可以分为3路信号进入接口处理器。加速度计通常采用一对一的接法。

图2 列车测速系统连接图
3 列车测速算法
列车测速算法,主要实现从速度采集设备输入车载信号主机,到向列车自动防护功能提供可信速度和距离信息的功能,包括原始运动信息测量、零速检测与防护,以及车轮打滑判定与补偿。
3.1 原始速度测量
OPG 的光栅盘有2圈过孔:时钟脉冲孔和编码孔,其中时钟脉冲孔有100孔或200孔,编码孔通常为100孔。OPG 的光电传感器有5 个(C1-C5)。C1、C2和C3用于扫描时钟脉冲孔,一方面可以检测出孔数,进而计算出车轮实际速度;另一方面,根据其不同相位,可以判定车轮实际方向。C4用于扫描编码孔,编码孔长短不一,车轮旋转1周构成1个假随机序列,即编码,不同车轮旋转方向对应不同的编码。C5的描述见3.2节。
OPG 计算车轮实际速度的公式如下:

式中:
vmeasure——车轮实际线速度;
d——车轮直径;
N——车轮旋转1 周,光电传感器产生的脉冲数;
wP——脉冲宽度,ms。
OPG 判定车轮实际方向的方法如下:
前进方向——C1 信号从低电平转高电平时,C2信号为低电平,C3信号为高电平;
后退方向——C1 信号从高电平转低电平时,C2信号为高电平,C3信号为低电平。
仅当C4的编码通过校验,OPG 的原始速度测量才会被车载信号主机认为有效。
与HES配套的测速齿轮有100 齿、110 齿和120齿。HES的霍尔效应传感器有2个(S1和S2),一方面可以检测出齿轮数,另一方面则可以判定车轮实际方向。
HES计算车轮实际速度的公式与OPG 类似。
HES判定车轮实际方向的方法如下:
前进方向——S1信号比S2信号快90°相位;
后退方向——S2信号比S1信号快90°相位。
DRS本身便可以完成原始速度测量,与车载信号主机采用RS-485串口通信,传输速率为192 00 Baud。根据用户的需求,可以提供速度、距离、方向以及加速度。
ACC向车载信号主机提供加速度的正负和大小。ACC通常采用的比例因子是±5 V/g,测量范围是±1g。值得注意的是,ACC所测量的加速度包含重力加速度沿列车所在坡道的分量,所以车载信号主机在使用该加速度时,需要进行预处理,即:
在上坡时,列车加速度=ACC 测量加速度+重力加速度沿列车所在坡道的分量;
在下坡时,列车加速度=ACC 测量加速度-重力加速度沿沿列车所在坡道的分量。
3.2 零速检测与防护
当列车速度低于0.5 km/h且在一定时间内检测不到任何脉冲时,车载信号主机认为该OPG 为零速。考虑到OPG 也有可能是故障,所以车载信号主机还会参考另一个OPG 的脉冲信号。当车载信号系统采取双端方案(2个OPG 分置列车两端车头)时,每一端的车载信号主机的零速检测都需要参考另一端的OPG 的C5信号。
使用HES的车载信号系统的零速检测方法与OPG 类似,只是利用一端的2个HES即可完成零速判定,而不需要使用另一端的HES。
除了利用信号自身的速度采集设备判定零速之外,车载信号主机也从车辆的列车线采集VZC(零速状态)。车载信号主机还通过零速继电器VZS(零速命令)向车辆提供零速信号,用于控制列车门控电路和牵引使能电路。
3.3 车轮打滑判定与补偿
车轮打滑分空转和滑行2种情况。空转是指车轮速度大于列车速度,往往发生在列车牵引阶段;滑行是指车轮速度小于列车速度,一般发生在列车制动阶段。不论OPG 还是HES均安装在拖车的制动轴,所以列车发生滑行的情况更多些。
车载信号主机判定车轮打滑的算法有车辆参数法和实时检测法2种。车辆参数法是指打滑判定算法中使用车辆的粘着系数-滑移率曲线转换出的经验参数判定车轮打滑。该方法适用于仅采用OPG或HES,而不使用其他速度采集设备的列车测速系统。实时检测法是指打滑判定算法中使用实时检测出的加速度与OPG 或HES计算得出的速度信息相比较来判定车轮打滑。使用DRS或ACC 的列车测速系统均使用该方法[4]。
3.3.1 车辆参数法的打滑判定算法
当Astartspin>Ameasure>Atraction时,列车进入牵引状态,此时计算的距离:
D=max[Dcycle(n-1),(1-Kspin)×Dmeasure]
当Aendspin>Ameasure>Astartspin时,列车进入空转状态,此时计算的距离:
D=Dcycle(n-1)
当Ameasure>Aendspin时,列车丢失位置,施加紧急制动。
当Astartslide<Ameasure<Abrake时,列车进入制动状态,此时计算的距离:
D=min[Dcycle(n-1),(1+Kslide)×Dmeasure]
当Aendslide<Ameasure<Astartslide时,列车进入滑行状态,此时计算的距离:
D=Dcycle(n-1)
当Ameasure<Aendslide时,列车丢失位置,施加紧急制动。
以上式中:
Ameasure——列车测量得到的实际加/减速度;
Atraction——列车最大牵引加速度(考虑坡度);
Abrake——列车最大制动减速度(考虑坡度);
Astartspin和Aendspin——空转开始和结束的门限值,基于粘着系数-滑移率曲线,并考虑列车实际速度计算得到;
Astartslide和Aendslide——分别为滑行开始和结束的门限值,基于粘着系数-滑移率曲线[5],并考虑列车实际速度计算得到;
Dcycle(n-1)——上一周期距离;
Dmeasure——列车测量得到的距离;
Kspin——列车最可能发生空转时的滑移率,一般取35%;
Kslide——列车最可能发生滑行时的滑移率,一般取15%。
3.3.2 实时检测法的打滑判定算法
根据OPG 或HES测得的vwheel(车轮速度)计算出Awheel(车轮加速度),然后计算该值与DRS或ACC测得的Ameasure的差值:
Adiff=Ameasure-Awheel
当Adiff超过加速度打滑容限(考虑坡度)时,则认为列车出现加速度打滑。
根据DRS或ACC测得的Ameasure计算出vreference,然后计算该值与OPG或HES测得的vmeasure的差值:
vdiff=vmeasure-vreference
当vdiff超过速度打滑容限(考虑加速度打滑等因素)时,则认为列车出现速度打滑[6]。
当出现速度打滑后,如果vdiff为负值,且|Ameasure|小于打滑门限值时,则认为列车处于滑行状态;如果vdiff为正值,且|Ameasure|小于打滑门限值时,则认为列车处于空转状态。打滑门限值一般取0.3 m/s2。
采用实时检测法的列车测速系统通常使用2个OPG 或HES,所以存在单轮打滑和双轮打滑2种情况。
当出现单轮打滑时,该算法使用未出现打滑的OPG 或HES测得的距离补偿(赋值)出现打滑的车轮。当出现双轮打滑时,每个车轮使用本周期测得的加速度和上一周期的速度值计算得出补偿速度,然后便可以计算补偿的距离。
3.4 实际速度与允许速度、目标速度的关系
实际速度是列车测速算法的输出结果,是在原始速度测量基础上,针对具体打滑工况进行速度补偿之后得到的计算值。允许速度,又称ATP(列车自动保护)限速,是在土建限速的基础上,减去安全余量(5 km/h或10 km/h)后得到的列车限速。车载信号主机会实时比较实际速度与允许速度,当实际速度减去允许速度的差值大于超速容限后,列车会触发紧急制动。
目标速度是在ATP或ATO(列车自动运行)限速曲线的基础上,为避免出现列车超速情况,限速曲线变化点采用提前减速计算得到的速度值。这通常发生在限速曲线从高速到低速的变化点。车载信号主机也会实时比较实际速度与目标速度,如果列车处于有ATP防护的人工驾驶模式,当实际速度减去允许速度的差值大于超速容限后,列车也会触发紧急制动;如果列车处于ATO 模式,由于是信号系统控制列车,所以一般不会发生紧急制动,但是在司机显示屏上还是会提示目标速度。
4 结语
速度采集设备种类繁多,性能各异。OPG 安装简便,传感器丰富,具备编码校验功能,特别适合于城市轨道交通车辆最高时速不超过120 km 的应用环境。HES构造简洁,性能可靠,需要与测速齿轮配合安装,不仅适用于城市轨道交通,也适用于城际铁路,甚至高速铁路。DRS测速精度高、范围广,功能强大,接口复杂,是理想的测速辅助设备。ACC结构简单,安装方便,性能稳定,接口单一,是测量加速度信息的首选设备。
列车测速系统通常采用多传感器信息融合技术,单端方案的系统架构清晰明确,车载信号主机之间无须传递测速参考信息,更利于测速功能的实现。使用OPG 或HES,并搭配ACC是比较好的系统配置方式。
列车测速算法的设计思路不同,很难取舍。车辆参数法在车辆防滑控制研究的基础上,提炼出信号系统判定车轮打滑的经验参数,更好地体现了信号与车辆融合的趋势。实时检测法则是基于信号系统自身的速度采集设备判定车轮打滑,更加准确,贴近现场实际工况,但也提高了算法的复杂度。
[1]甄伟民.新型列车轴端测速传感器的原理及应用[J].企业技术开发,2007(9):70.
[2]TB/T2760—1996 机车轴端光电转速传感器[S].
[3]张洋,周达天,刘宏杰,等.基于多传感器融合的列车测速定位方法[J].都市快轨交通,2011(8):30.
[4]王秀红.机车防滑控制关键技术的研究[D].北京:北京交通大学,2010.
[5]International Union of Railways.UIC 544 - 1 Brakes-Braking Power[S].
[6]赵磊,张小林.列车测速定位误差的仿真研究[J].城市轨道交通研究.2014(3):35.
[7]TB/T1407—1998列车牵引计算规程[S].
猜你喜欢
导航定位学报(2022年5期)2022-10-13 08:43:40
北京航空航天大学学报(2022年7期)2022-08-06 07:28:18
城市轨道交通研究(2021年12期)2022-01-12 04:04:44
铁道通信信号(2020年1期)2020-09-21 08:55:18
铁道通信信号(2020年8期)2020-02-06 09:13:18
铁道通信信号(2018年12期)2019-01-31 05:36:46
铁道通信信号(2018年7期)2018-08-29 01:17:06
中国公共安全(2017年11期)2017-02-06 05:28:09
导航与控制(2016年4期)2016-09-23 08:43:25
铁道通信信号(2016年11期)2016-06-01 12:11:22
