
全自动无人驾驶模式下对通信系统的需求分析
2015-06-28 14:52李苏雯
铁路计算机应用 2015年7期
李苏雯,王 浩
(中国铁道科学研究院 电子计算技术研究所,北京 100081)
轨道交通信息系统
全自动无人驾驶模式下对通信系统的需求分析
李苏雯,王 浩
(中国铁道科学研究院 电子计算技术研究所,北京 100081)
为达到车辆全自动无人驾驶的目的,轨道交通通信系统在既有接口功能的基础上,针对使用场景重新进行需求分析,优化了与车载设备、地面相关系统的接口功能和实施方案,满足全自动无人驾驶的运营指挥需求,并提供了应急故障情况下的通信及监控手段。
全自动无人驾驶;通信系统;需求分析
轨道交通的全自动无人驾驶是指在没有司乘人员参与的情况下,车辆经由线路控制中心的统一控制指挥,实现全自动运营,并且在故障情况下能够自动恢复等。
全自动驾驶系统与传统驾驶系统的功能变化主要体现在车辆、信号、通信、综合监控等核心子系统要求的改变,以及车辆段管理、行车组织的转变。因此需要各系统在原有功能实现的基础上,增强与车辆及地面系统的接口功能及其可用性和稳定性。
本文以通信系统为例,分析了在全自动无人驾驶模式下对通信技术的需求。
1 通信系统支持的全自动无人驾驶操作场景
1.1 车辆远程上电
车辆运营前,调度人员通过地面广播、闭路电视监控系统(CCTV)对无人库内的情况进行确认,在环境安全的情况下由调度人员执行远程送电。
1.2 轧道车运营
轧道车(首车辆)在正线运营的第一圈,不停站不开门,经过站台时,通过通信系统站台广播告知站内人员本次车辆不停车。
1.3 车辆进站停车
车辆进站时通过行车综合自动化系统(TIAS)与广播的接口,将自动发出到站广播信息;停车位置过标不允许退行调整时,需调度人员经由车内广播、站台广播告知旅客注意,并通知司机上车排除故障。
1.4 站台发车
正常情况下,车辆发车时车载系统将触发发车广播,车载乘客信息系统(PIS)显示屏也将切换下一站到站信息;如在车辆停站扣车期间,车辆车门和站台门应重新打开,并将自动触发站台广播,告知旅客和站台工作人员注意。
1.5 车辆折返换端及清客
车载控制接口开启乘客广播,并在车载PIS显示屏上显示清客信息,中心调度人员通过车辆CCTV进行车内清客确认;TIAS联动车站广播和站台PIS显示屏,提示本站清客,站台乘客请勿上车;如果运营中存在必须折返转通过进路的情况,通过车站广播和车辆广播通知乘客。
1.6 车门故障及再关门控制
TIAS联动站台CCTV及车上CCTV人工远程确认可以关门时,通过车辆监控调度台下发关门命令。
1.7 列车紧急制动
车辆PIS将紧急手柄拉下报警区域定位后的画面主动推送给中心调度CCTV监视器;紧急手柄恢复后,中心调度经CCTV确认后由中心车辆或本地司机确认后允许发车。
1.8 发起紧急呼叫
客室内设置紧急呼叫按钮,当乘客触发客室内的紧急呼叫按钮后,可通过其与车载无线电台的接口,实现乘客与中心调度台或司机人员的通话。
1.9 车辆异常情况
车辆故障或运营区间内发生意外情况时,中心调度员可实时对车辆或站内、区间进行广播,起到应急告知疏散乘客的作用;同时中心调度员可通过车内、站台、区间摄像终端远程调看图像,及时了解现场情况,开展救援。
2 对车载通信系统的新增需求
为保证无人驾驶情况下,调度指挥对车辆的正常操控以及应急故障时的救援,车载通信设备需能够满足视频监控、车地无线通信以及车载应急对讲等功能需求:
(1)全自动驾驶系统中, 通信系统需要为控制中心调度人员提供运行车辆前方、内部及沿线图像。
(2)乘客与控制中心的双向语音通话。
(3)车地无线通信的质量要求更高。
2.1 新增车载应急电话功能
每节车厢都应在车门位置新增车载应急电话,利用集群无线电(TETRA)的通道,通过车载广播系统与无线通信系统的接口,既可以实现既有线路中心调度员对车辆发起广播的功能,也可以实现乘客与控制中心调度员或车辆驾驶室控制台的双向通信对讲功能。
2.2 增强车辆前后方视频监控功能
由于取消了驾驶室的封闭设置,车头尾加装具有红外夜视功能的视频监视设备,用于增强对车辆前后方的监视及记录事故信息,便于日后分析事故原因;车辆故障时,辅助控制中心远程控制车辆蠕动到待避线、车站。拍摄的图像将通过车地通信接口上传控制中心或保存在车辆本地硬盘。
2.3 增强车内视频监视联动功能
在全自动驾驶条件下,车辆本身的监控信息及特殊事件的告警信息均通过信号专业进行收集,如门拉手动作、火灾报警等。同时车辆收集车内对讲电话报警终端位置信息、火灾报警位置信息和相关复位信息,通过车辆或车辆集成管理系统(TIMS)的接口触发PIS车载系统将司机室触摸屏显示内容自动切换到相应报警画面,同时上传至控制中心显示。
2.4 车载广播系统功能增强
无人驾驶情况下,车载广播通过与TETRA无线系统的接口实现以下3种功能:
(1)行车自动运行驾驶模式(AM)下播放计划的乘客通知;
(2)人工模式下驾驶员现场广播;
(3)运行控制中心(OCC)调度员远程人工广播。
2.5 通信系统需提高的性能
2.5.1 增强通信车载设备安全性和稳定性
为增强车载PIS、CCTV、TETRA无线设备运行的安全性、稳定性,车载相关设备进行冗余配置,互为热备份。同时所有设备具备自动检测和报告,自动开机、关机的功能。并且车地无线实现的PIS 、CCTV 支持两个频点的主备冗余。
2.5.2 增强对车载通信设备的状态监控
中心级综合监控系统(ISCS)需实现对车载无线、CCTV、 PIS设备的状态进行监控。车载TETRA、PIS的自检和故障信息通过扩展与车辆的接口传送给TIMS,TIMS统一管理车载设备信息并且上报给信号系统,经信号车载设备和车地无线通信传送给地面ATS,再与车辆其他设备的状态及故障信息一并告知综合监控系统进行监控。
3 车辆与车载通信系统的接口实现
通信系统车载设备与车辆接口如图1所示。
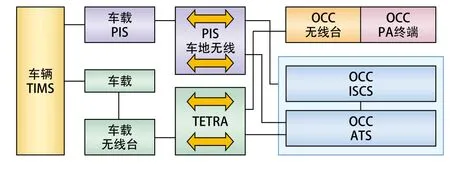
图1 通信系统车载设备与车辆接口
3.1 车载广播与TETRA车载电台的接口
TETRA系统车载台提供1路RS422串行接口和线音频接口,采用14芯航空插头的形式与车载广播设备对接,实现车辆与通信系统之间的音频传输和车载电台的状态信息采集。
3.1.1 中心下发广播实现流程
广播由中心调度人员发起,车载台在接收到调度的广播开始指令后,发送广播开始请求给车载广播系统,车载台收到车载广播系统的确认消息后打开广播音频,同时回复广播开始消息给调度系统,至此广播建立。
同样广播结束也由中心调度人员发起,车载台在接收到广播结束指令后,发送广播结束消息给车载广播系统,同时关闭广播音频,调度本次广播结束。
中心下发广播流程如图2所示。
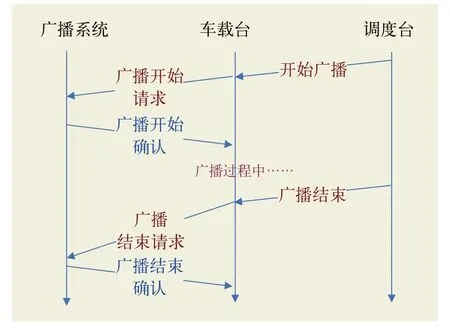
图2 中心下发广播流程
3.1.2 乘客紧急呼叫实现流程
紧急呼叫由车载广播系统发起,车载台在接收到车载广播系统的请求开始消息后,将把该消息发送到中心,中心调度员按此提示建立呼叫,车载台会发送乘客紧急呼叫开始确认消息给车载广播,同时打开音频通道,乘客紧急呼叫开始实施。
当呼叫结束后,车载台接收中心调度员指示,发送紧急呼叫结束消息给车载广播系统,同时关闭音频通道。

图3 乘客紧急呼叫建立流程
乘客紧急呼叫建立流程如图3所示。
3.2 车辆TIMS与PIS车载设备的接口
车辆TIMS提供1路MVB接口与PIS车载设备对接,实现以下数据交互:
(1)车辆为PIS提供到站及预告信息等;由PIS系统负责在车载显示终端播放。
(2)由车辆为PIS提供本车统一的时钟信号。
(3)车辆为PIS提供对讲电话报警终端位置信息、通话终端的位置信息、火灾报警位置信息和相关复位信息 ;PIS负责实现将司机室触摸屏显示内容自动切换到相应报警画面(全屏显示),同时上传至控制中心显示。
(4)车辆为PIS提供车头车尾切换信号。
(5)PIS向车辆提供自检状态信息及设备故障信息。
(6)PIS预留车辆非安全信息上传通道。
4 对地面通信系统的新增需求
4.1 增强对行车沿线的视频监视功能
在线路沿线重要的地点设置视频监控,作为事故调查的依据。视频可以通过传输通道汇集到邻近的车站存储,或再上传到OCC。
4.2 增加对车辆段CCTV、PA设备联动控制功能
在车辆段无人区进行车辆出库、调车作业、自动洗车等操作过程中,车辆段调度员需通过车场内CCTV监视车辆的动作过程,通过ISCS根据ATS提供的车辆运行位置,对车辆段CCTV进行随车切换联动。在车辆动作前,需要对现场自动进行广播提示通过ISCS根据ATS提供的车辆动作信息,对车辆段乘客广播(PA)系统进行自动播报联动。
通信系统底面设备与车辆段ISCS接口示意图如图4所示。
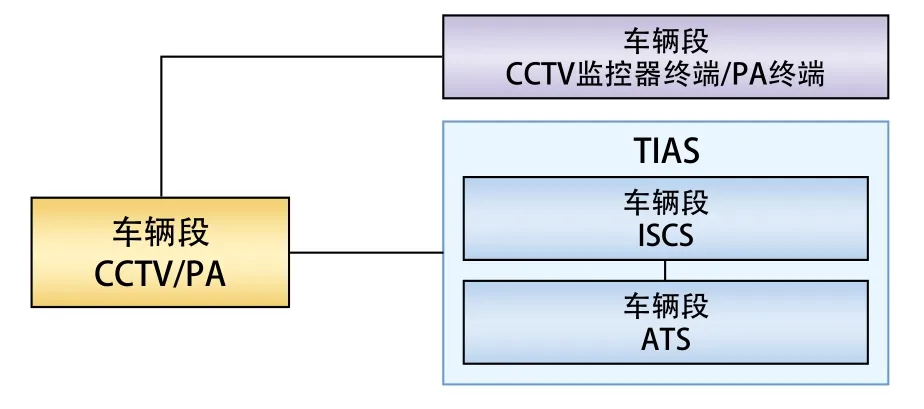
图4 通信系统地面设备与车辆段ISCS接口示意图
4.3 配合车载通信系统功能实现的设备定位
为满足中心调度员对车辆实况的准确定位,需信号系统为TETRA车载无线电台、站台广播、车载CCTV系统提供本次通信的车次编号等信息。
5 结束语
提高车载CCTV功能后,对车地通信无线通信系统带宽要求增大,目前车地无线的带宽受到一定限制,时延较长。为进一步增强车地通信传输带宽和质量,轨道交通领域正在尝试通过新一代无线通信技术支持PIS车地无线传输,其稳定性、可靠性正在试验过程中,有望推出试行。
责任编辑 陈 蓉
Requirement analysis of Communication System in automatic unmanned driving mode
LI Suwen,WANG Hao
( Institute of Computing Technologies, China Academy of Railway Sciences, Beijing 100081, China )
In order to achieve the purpose of automatic unmanned driving, based on the existing interface function of Urban Transit Communication System, requirement analysis was made for the usage scenarios. The interface functions and implementation plans associated with the vehicle equipment and other systems were optimized. The Communication System could meet the requirements of operation of automatic unmanned driving, provide communication and monitoring under the conditions of emergency failure.
automatic unmanned driving; Communication System; requirement analysis
U285.211∶TP39
A
1005-8451(2015)07-0057-04
2014-11-29
李苏雯,助理研究员;王 浩,助理研究员。
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
快乐语文(2021年15期)2021-06-15
童话世界(2020年13期)2020-06-15
上海节能(2020年3期)2020-04-13
铁道通信信号(2020年8期)2020-02-06
模具制造(2019年7期)2019-09-25
汽车维修与保养(2019年3期)2019-06-19
故事大王(2019年4期)2019-05-14
下一代英才(酷炫少年)(2018年6期)2018-07-09
高中生·青春励志(2017年2期)2017-06-09
