
基于应急现场多源可见光照片的 快速三维测绘场景重建研究
2015-06-24 08:57王圣伟
电气技术与经济 2015年5期
徐 健 王圣伟 邓 创
(国网四川省电力公司电力应急中心)
1 电力应急场景三维重建需求分析
1.1 国内外研究水平综述
为了实现快速三维场景重建,研究人员一直在算法和技术上进行尝试。在传统摄影测量领域,研究人员重点关注非测量型相机在近景摄影测量及无人机载航测中的应用[1]。在计算机视觉领域,由于不关注相对和绝对几何精度,甚至仅在仿射空间中进行三维重建即可以作为有意义的结果数据,故该领域的研究人员更多地关注三维重建的自动化算法[2-6]。
1.2 研究意义及目的
本文研究的主要内容是将应急现场获取的多角度、多点位图片信息进行融合处理,结合这些信息源的位置、方向、角度、光学信息等,通过几何校正、航测平差、数字点云生成、三维贴图等步骤实现应急现场具备测绘精度的三维空间场景的重建。总体而言,基于现场勘测图片重建的三维场景,可给现场提供直观、完整、丰富的可视化灾情展示,在现场灾情细节的具体测绘和分析中,也可以充分利用空间信息对灾情的严重程度、发展态势以及救援方案进行分析和辅助推演,大大提高应急现场灾情研判和指挥决策的信息化程度,对提升应急救援的效率和技术水平具有重要的意义。
2 系统架构
2.1 系统架构设计
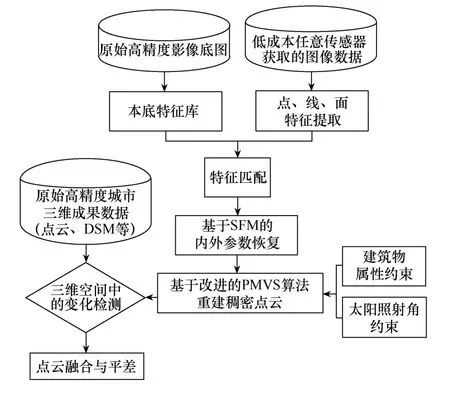
图1 系统架构图
如图1所示,三维应急现场重建系统的整体架构共分5个步骤[7-9]:①实验数据采集及预处理:分别利用典型的消费级成像设备,采微型无人机搭载方式获取空中俯视图像集;②高精度本底数据预处理:对影像底图进行预先计算得到本底特征库,预提取的特征即包括SIFT、SURF算子提取的特征点,也包括 Harris、DoG算子提取的角点;③特征匹配与内外参数恢复:对于特征点的匹配,采用SFM的成熟算法,对于特征面和特征边之间的匹配,参照SFM算法构造一种混合特征点和特征面和特征边的匹配方式; ④改进的稠密点云重建:本研究拟改进PMVS算法,充分利用由拍摄、地点确定的太阳高度角和气候状况估计建筑物光照情况;⑤点云重建结果的变化检测与融合:本研究拟采用机器学习的方法在三维空间中进行点云数据的变化检测,并以此为基础实现点云更新和融合。
2.2 系统的主要技术难点
系统主要有以下两个技术难点:①基于无人机的高精度影像配准技术。本文首先要实现无人机数据与其他参考数据源之间的高精度自动配准。在分析无人机数据存在的几何形变和参考数据源的特点的基础上,针对不同的参考数据源,采用与之特点相适用的匹配方法。②基于计算机视觉的三维重建技术,如何提高SFM算法的效率以适应可用数据源数量的迅速增多已经成为三维重建领域研究的热点;此外,由于拍摄点不能完全覆盖场景,上述方法得到的点云肯定是不完备的,因此将利用更多传感器搭载手段获取完备的城区影像数据及相应的算法也是一个技术。
3 系统算法研究
3.1 任务规划系统研发
三维重建的任务规划系统是无人机采集数据时候的一个重要指导系统。无人机采集的数据对后面的重建工作起到关键性作用,而三维重建任务规划系统能有效指导无人进行相关数据采集,使得采集回来的数据能满足后面重建的要求[10]。
3.2 无人机数据采集系统研发
无人机数据采集系统结构图如图2所示。
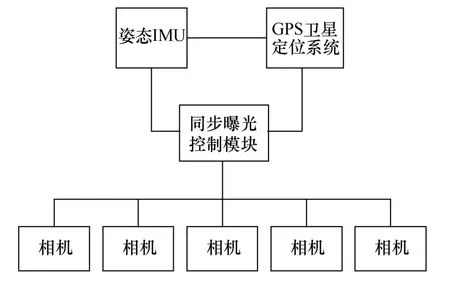
图2 无人机数据采集系统结构图
由结构图可知全景相机数据采集系统,需要GPS全球卫星定位系统提供连续可靠的地理坐标信息和UTC时间。首先,把地理坐标信息提供给姿态IMU,配合IMU数据形成更加稳定和连续的实时定位信息。然后,提供PPS秒脉冲给同步曝光控制模块,用于同步系统时钟。最后,在同步曝光信号的驱动下,同步记录GPS数据。
3.3 快速三维应急场景重建系统研发
三维应急场景重建系统主要包括以下模块:

相机标定分为内标定和外标定。内标定主要标定相机自身的参数。外标定主要是标定相机模型与世界坐标系之间的方位参数。
相机姿态计算模块主要用于计算相机拍摄不同影像时的姿态,再通过归一化得到每次成像时相机的姿态,从而为后面三维重建模块提供条件。
三维点云重建模块主要解决从影像到三维点云的生成问题,利用上面两步算出来的结果再结合多目视觉约束关系把在影像上的像素点生成点云。
三维模型生成模块是从上面得出的点云中进一步处理得到相应的三维模型。
3.4 三维地形数据展示系统研发
为了把三维模型和影像更好地展示出来并在其上面做常用的处理,本文研发了数据展示平台,这个数据展示平台包含了三维GIS标绘系统的通用功能。按实际开发可以分几个功能:数据操作、天气特效、粒子特效、三维测量、标绘系统。
4 应用实例
4.1 应用与环境
以一台配置四核处理器、16G内存、1TB空间硬盘、Win7操作系统的电脑为地面工作平台;以主要系统参数是起降方式手抛滑跑起飞/降落/伞降、机身材料EPO、翼展1800mm、机身长度1230mm、机身高度160mm、任务仓最大宽度135mm、空机重量1165g、续航时间40~120min的无人机为航拍设备,实现将四川某地区变电所三维建模的任务。
4.2 应用结果展示
四川地区变电站三维重建点云展示,如图3所示。
从上述应用结果可看出来,点云比较精细,起伏明显。整个方案最终有效地把从无人机采集回来的影像数据,GPS数据,IMU数据融合在一起最总生成精确的三维点云和三维模型。
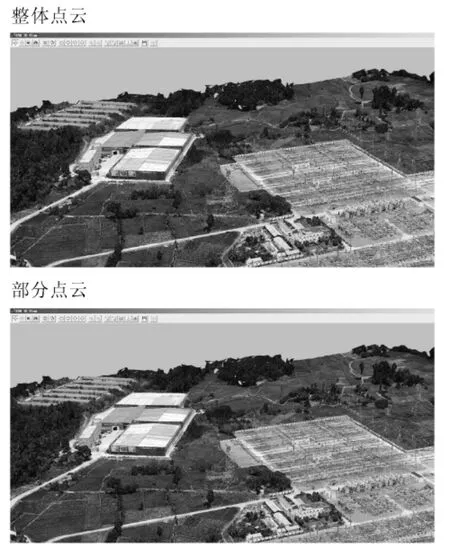
图3 四川地区变电站三维重建点云展示
5 讨论与展望
近年来对电力供应的可靠性、持续性的要求越来越高,因此考虑电力应急反应的高效性、准确性变得越来越重要。未来还有很多工作可以持续开展,如:
1)在以地图模型进行了分析时,如何综合考虑各种因素,以及各因素内部关系的正确处理将是未来研究的趋势。
2)地质灾害对电网的影响因素多,如何利用更加真实全面的地形数据,改进各类灾害的预测模型以提高预测准确度也是今后研究的重点。
3)根据详尽的地理模型对灾变下电网的相关风险分析也是研究的方向。
6 结束语
本文提出了采用照相机、摄像机、拍照手机等消费级图像采集设备对高精度场景三维重建成果进行更新的技术路线,阐明了未标定图像三维重建的基本原理、误差模型、精度控制及自动化方法,改进了计算机视觉中特征匹配算法和稠密点云重建算法,建立一套完整的低成本三维场景模型更新软件原型体系。给现场提供直观、完整、丰富的可视化灾情展示,使得灾情现场的信息展示更具有整体性,可大大提升指挥决策的效率。
[1]陈兵旗, 孙明. 实用数字图像处理与分析[M]. 北京:中国农业大学出版社, 2003.
[2]罗军辉, 冯平. Matlab在图像处理中的应用[M]. 北京: 机械工业出版社, 2007.
[3]VATTIBR. A generic solution to polygon clipping[J]. Communications of the ACM, 1992, 35(7): 56- 63.
[4]纪凤, 欧宗瑛, 秦绪佳. 基于Delaunay三角剖分的层析图像离散数据表面重建算法[J]. 工程图学学报, 2001, 22(2): 53- 58.
[5]BAKSHIS, YANGY. Shape from shading for non-lambertian surfaces[C]//Proc of International Conference on Image Processing, 1994: 130-134.
[6]刘华松, 庄飞. 新农村建设与村庄规划[J]. 中国新技术新产品, 2009(4): 196.
[7]吕厚宜. 无人机发展与无人机技术[J]. 世界科技研究与发展, 1998, 20(6): 113-116.
[8]王海斌, 葛雪雁, 宋玉珍. 无人机的发展趋势与技术预测[J]. 飞航导弹, 2009(11): 46-52.
[9]马轮基, 马瑞升, 林宗桂, 等. 微型无人机遥感应用初探[J]. 广西气象, 2005, 26(Z1): 180-181.
[10]金伟, 葛宏立, 杜华强, 等. 无人机遥感发展与应用概况[J]. 遥感信息, 2009, 88(5): 88-92.
猜你喜欢
江苏安全生产(2022年7期)2022-08-24
江苏安全生产(2020年6期)2020-07-28
汽车维修与保养(2020年11期)2020-06-09
软件(2020年3期)2020-04-20
劳动保护(2018年5期)2018-06-05
中国惯性技术学报(2017年1期)2017-06-09
灾害医学与救援(电子版)(2017年3期)2017-02-06
光学精密工程(2016年6期)2016-11-07
光学精密工程(2016年3期)2016-11-07
腹腔镜外科杂志(2016年12期)2016-06-01
