
过程控制系统中模糊控制应用研究
2015-06-12 12:02王彩彦
长春工业大学学报 2015年2期
王彩彦
(桂林航天工业学院,广西 桂林 541004)
0 引 言
自上世纪80年后,过程控制系统成为那个时代使用最为广泛、发展最为迅速的控制理论,该控制系统从分散局部控制站的手动控制过程逐步向高度集中的运动控制中心过渡,并成功地应用到实际工业生产过程中。随着过程控制系统研究的不断深入,基于神经网络、模糊控制等智能控制技术的快速发展,过程控制实现了集成化和分散化的综合化自动控制。然而,正是由于过程控制系统发展之迅速,许多企业过多考虑系统带来的利益,忽视了过程控制系统最基本的理论研究,导致许多设计人员对于控制理论相对模糊。可见,在今后的过程控制理论研究中,应重点关注目前过程控制系统存在的几个问题:
1)时变性。由于工业设备使用过程会出现不同程度的磨耗或一定程度的磨损,加上设备系统内部控制机制的复杂性,导致控制系统在持续运用过程中产生许多不确定的因素。由于目前大多数过程控制系统均采用传统的PID控制器,该控制方式的使用需要建立一个明确的控制对象模型,而且系统被控对象的模型精度较高,使得传统的控制方式无法有效解决目前工业设备在过程控制系统中出现的时变问题[1-5]。
2)系统的滞后性。目前,过程控制系统大多数使用在工业设备的温度、流量、压力以及液位的高低等自动化控制。但在实际控制过程中,所谓的被控参数传输到控制系统之间存在着一定的数据滞后性,导致系统控制产生一定的偏差,并影响到整个系统的控制效果。
3)系统的高耦合性。随着信息化技术的发展,过程控制系统的功能相对广泛,其涉及的控制变量也相应增多,控制变量之间存在着一定的联系。许多变量在过程控制中并不是独立存在的,它们具有相互影响和关联性。这样一来,系统在控制过程中,只要一个控制变量发生变化,涉及的多个控制变量也相应的发生改变。系统高耦合性不但严重影响整个系统的控制效果,而且增加了整个系统开发及控制的难度。
1 模糊控制技术的分析
1.1 模糊控制规则
模糊控制规则作为模糊控制器设计的基本原则,也是模糊控制器最重要的组成部分,其中不同的模糊控制系统模型对应不同的控制规则。目前,我国对于模糊控制设计过程中使用最为广泛的系统模型为Mamdani模糊模型和T-S模糊模型[1]。基于Mamdani模糊模型的模糊控制规则最大的特点在于规则的形式,无论是思维方式还是语言表达方式都相对人性化,基于Mamdani模型的模糊控制规则形式简单例子如下式:

可以看出,A,B,C分别是模型输入、输出变量的语言变量。因此,模糊控制规则对于设计人员或操作人员相对简单,容易操作。
基于T-S模糊模型的模糊控制规则与Mamdani模型的模糊控制规则从表达形式上看十分相似,但这两种模型的模糊控制规则最大的区别在于输出量。对于基于T-S模糊模型的模糊控制规则而言,其输出量并非是一种语言变量,而是由一个常量或输入变量的线性组合构成。基于T-S的两种模糊控制规则如下式:

式中:A,B——分别表示模糊控制的输入变量;k,p,q,r——常量。
1.2 模糊控制器的基本原理
模糊控制系统的工作原理主要有3部分,即语言变量的输入-模糊控制-语言变量的输出,其中模糊控制器为控制系统的核心[6]。该系统核心部分主要包括3个过程:
1)输入变量的模糊化处理过程。所谓输入变量的模糊化处理过程就是模糊控制器对每个一维的输入变量进行模糊处理,将控制系统的输入变量转化为模糊控制模型所识别的语言变量[7]。语言变量的个数完全由过程控制系统决定,不同的控制对象、不同控制要求对应的语言变量也不尽相同。
2)基于模糊控制规则的模糊推理过程。模糊推理过程主要是通过已设置好的模糊控制规则,根据输入变量条件与模糊控制规则中的限制条件去推导某个结论,并利用所产生的推导结论完成被控对象的控制。
3)输出变量的模糊化过程,即输出变量的转化过程。要最终实现被控对象的控制,需要将模糊控制器中的输出语言变量转化为系统识别的精确控制量,也就是被控对象的一个精确数值[8]。
2 基于模糊控制下的MIMO系统过程控制应用研究
2.1 基于MIMO控制系统的家用热水器模糊控制系统结构设计
家用热水器作为一种简单的MIMO控制对象,在系统模糊控制过程中主要针对热水器的水温和流量,如果采用智能解耦控制方式来设计控制器会造成系统变量的多余,控制策略无法有效利用。因此,文中采用自适应解耦控制方式实现热水器的流量和水温的控制,不仅控制过程简单,而且设计人员可以通过手动调节的经验获取必要的控制规则。
热水器模糊控制系统结构如图1所示。
该系统由两个输入变量、两个输出变量、两个调节器、模糊控制器以及两个流量阀控制端组成,其中模糊控制器成为整个控制系统的核心部分[5]。
整个系统工作原理为:
首先进行流量和水温输入变量的设置,通过模糊控制器进行输入变量的模糊化处理过程、模糊推理过程以及最后的输出变量的模糊化过程。
其次,根据模糊控制器输出变量进行热水阀和冷水阀的流量控制,结合下式中的混合器数学控制模型完成热水器的水流量和水温度的输出。
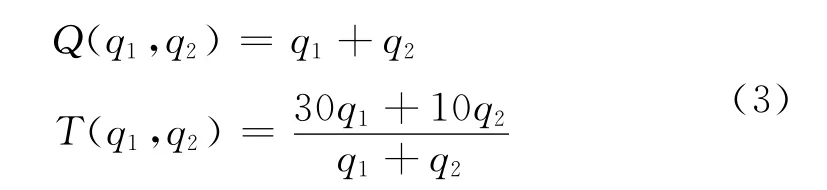
式中:q1——热水阀流量;
q2——冷水阀流量;
Q(q1,q2)——热水器的输出水流量;
T(q1,q2)——热水器的输出水温度。
最后,将输出与输入变量进行比较,将输入与输出的偏差进行再次控制,最终保持输入和输出变量一致。
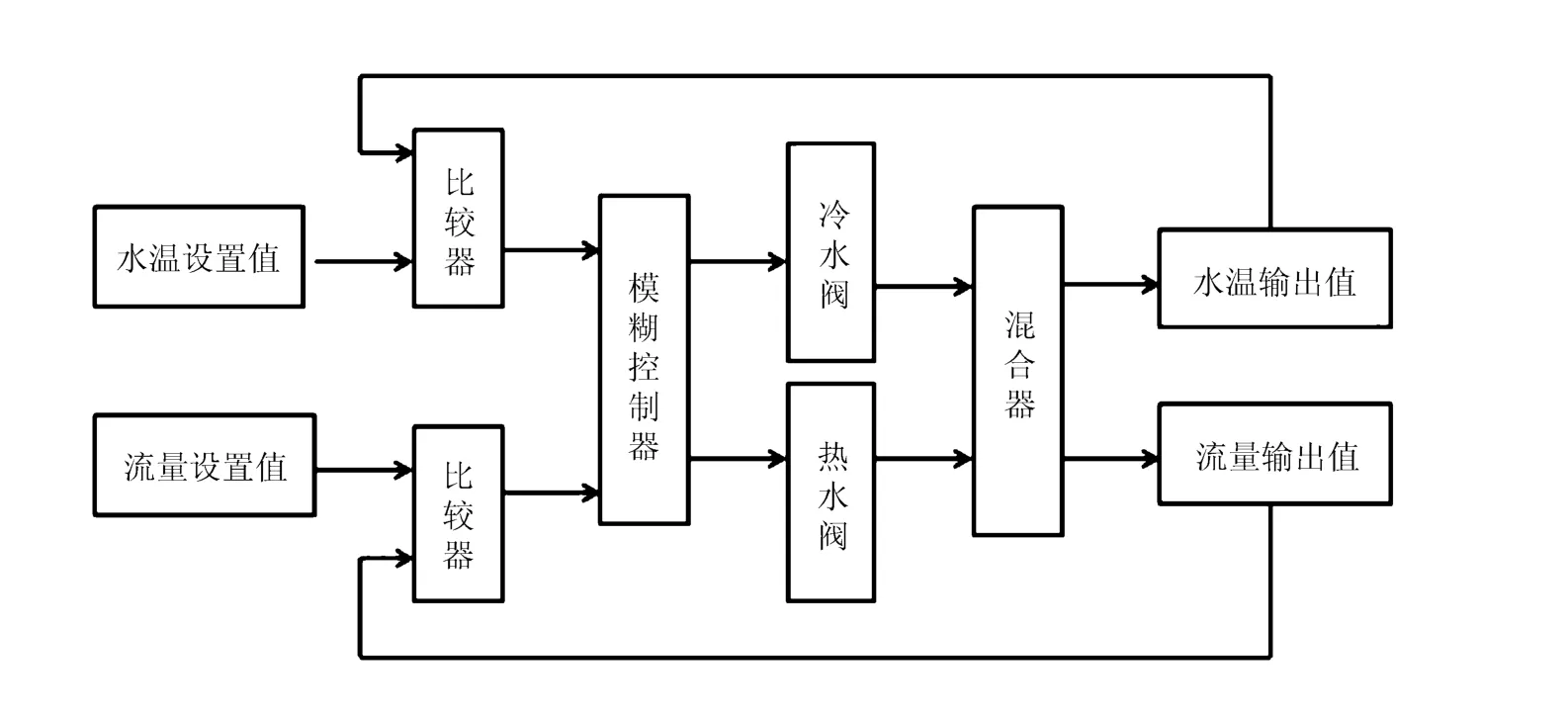
图1 基于MIMO控制系统的热水器模糊控制结构
2.2 模糊控制器设计
对于模糊控制器的设计,主要包括输入隶属度函数、输出隶属度函数以及模糊控制规则的确定[4]。文中采用的是两输入、两输出的MIMO系统,即两输入为水流量偏差和水温偏差,两输出分别为热水阀和冷水阀的控制量。因此,根据系统控制要求,水温偏差隶属度函数、水流量偏差隶属度函数以及输出变量隶属度函数如图2所示。
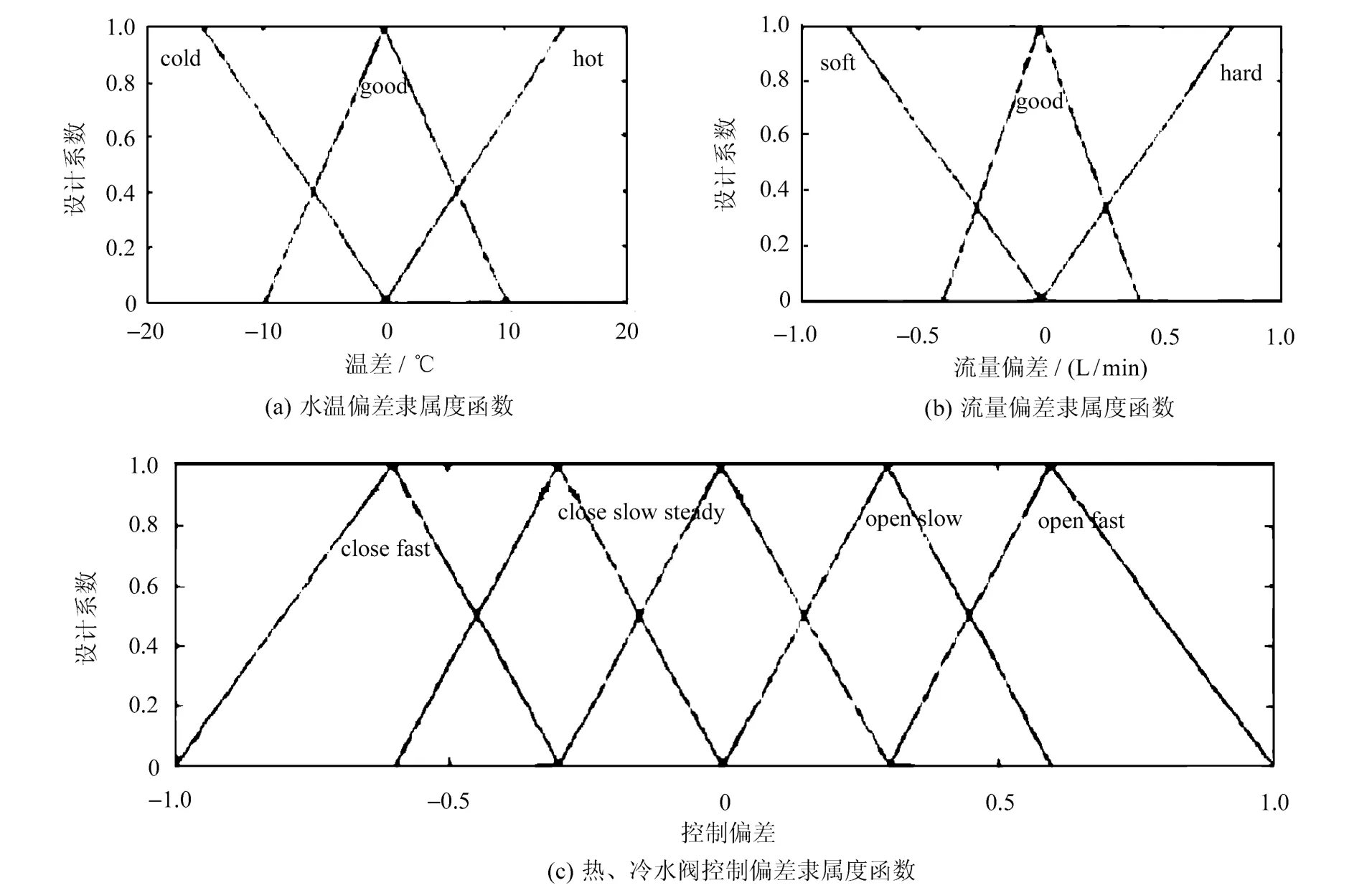
图2 输入、输出隶属度函数
2.3 基于Matlab的仿真分析
热水器水温和流量模糊控制系统的仿真结果如图3所示。
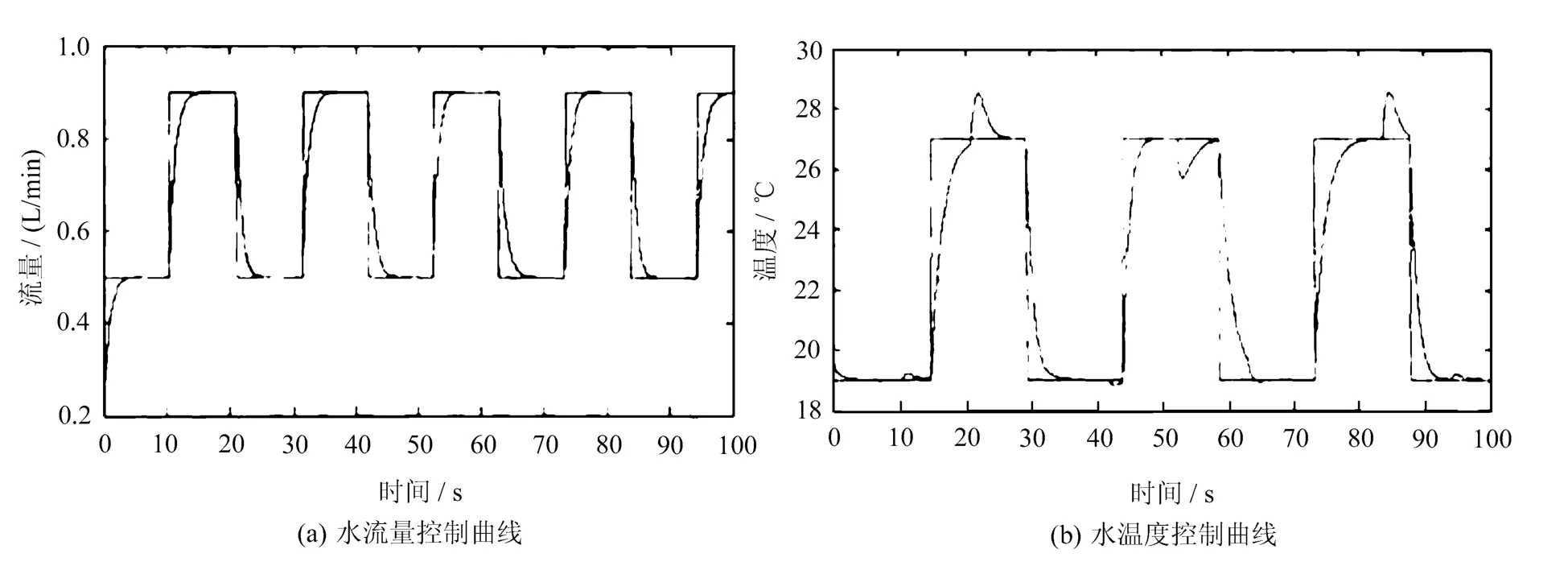
图3 基于Matlab的模糊控制系统仿真结果
从仿真结果可以看出,水流量控制完全达到预期效果,由于温度相对与流量控制而言,具有一定的滞后性,在水温控制过程中会出现较小的滞后和偏差,但总体上水温度控制还是符合设计要求的,达到了预期控制效果。
3 结 语
随着智能技术发展的不断深入,模糊控制所具有的优越控制性能在智能化领域发挥的作用越来越大,并得到越来越广泛的应用。文中结合日常使用的热水器工作原理,设计了一个两输入、两输出的模糊控制器,满足热水器对水流量和水温度参数的实时控制,并采用基于Matlab软件对模型进行仿真验证,得到预期效果。由此证明模糊控制在过程控制系统运用中的优势,它的运用与研究对我国智能化领域的发展具有重大意义。
[1] 宋哲英,王军,刘朝英,等.基于RTW的过程控制实时仿真系统设计[J].河北科技大学学报,2010(5):451-454.
[2] 丁学明,张培仁,张志坚,等.T-S模糊模型的辨识与控制[J].电机与控制学报,2005(5):473-476.
[3] 牛培峰,高龙,孟凡东,等.基于神经网解耦的循环流化床锅炉燃烧系统自适应模糊控制[J].仪器仪表学报,2011(5):1021-1025.
[4] 马昕,王平,李文博,等.基于PCS7的内模控制器设计与应用[J].计算机测量与控制,2010(10):2285-2288.
[5] 王广军,朱丽娜,沈曙光.一种基于逆动力学模糊规则的自适应控制方法[J].系统仿真学报,2008(15):3907-3910.
[6] 张淑霞,马跃,白羽,等.基于模糊控制的旋转型双支点倒立摆系统[J].长春工业大学学报:自然科学版,2007,28(1):109-113.
[7] 曾竞,谢又成.基于模糊自整定PID的主汽温串级控制系统的设计[J].微计算机信息,2007,19:46-48.
[8] 何小宁,肖伸平,王兵,等.多变量模糊控制系统的结构分解及其应用[J].计算机测量与控制,2005(5):452-454.
猜你喜欢
煤气与热力(2021年12期)2022-01-19
电子制作(2019年16期)2019-09-27
金桥(2018年6期)2018-09-22
数学大王·低年级(2017年4期)2017-04-10
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
少儿科学周刊·儿童版(2015年7期)2015-11-24
少儿科学周刊·儿童版(2015年7期)2015-11-24
筑路机械与施工机械化(2014年4期)2014-03-01
