
基于EDEM的一种立式混合型搅拌装置的应用研究*
2015-06-11 00:46:08王振鹏
机械研究与应用 2015年4期
王振鹏,李 耀,谢 东,赵 悟
(长安大学道路施工技术与装备教育部重点实验室,陕西西安 710064)
0 引言
混凝土搅拌机是将水泥、水、细集料和粗集料按合理的配合比混合并拌制出工作性、强度和耐久性合适的混凝土的机械。目前在国内外,立轴混凝土搅拌机的形式主要有立轴行星式搅拌机和立式涡桨搅拌机两种,有关立式混凝土搅拌机其他形式搅拌装置的研究较少。而搅拌机最主要的机构就是搅拌装置,搅拌装置的形式对混合料的搅拌时间和搅拌均匀性有很重要的作用[1]。为了探究混合型搅拌装置在强制式立轴混凝土搅拌主机上的应用,笔者通过将六铲式搅拌装置、六螺带式搅拌装置以及混合型搅拌装置三种不同形式的搅拌装置的物料流动进行对比分析,即利用EDEM离散元软件对两搅拌机进行物料流动仿真对比分析,来验证混合型搅拌装置在强制式立轴混凝土搅拌主机应用的合理性。
1 三种立式搅拌装置的搅拌机理
混凝土搅拌机将混凝土中的各成分搅拌混合成一种各物料颗粒相互分散、均匀分布的混凝土混合物,并且可以通过在拌好混凝土中随机抽取一定数量的样本进行分析来评价混凝土质地均匀的优劣,假如混凝土中各组成成分在混凝土中所占比例大致一样,就证明该混凝土质地均匀性较好。想要使混凝土中的各组分混合均匀,必须在搅拌过程中使每一组分的颗粒能分散到其他各种组分中去,因此,必须设法使各组分都产生运动,并使他们的运动轨迹相交,相交次数越多,混凝土越易混合均匀[2-3]。
铲子型混凝土强制搅拌机通过搅拌装置旋转,迫使混凝土物料颗粒在搅拌筒体内随着搅拌叶片在水平方向按围流循环流动,从而产生一个强烈的三维立体搅拌空间。搅拌装置的铲子叶片既有向上的安装倾角又有内外倾斜的倾角,当搅拌装置旋转时会对物料产生向上的翻动以及内外相互交汇的流动趋势,外加最外侧刮板的作用,使物料的运动轨迹更为复杂,搅拌作用更加激烈,进而实现各物料均匀混合。
螺带式混凝土强制搅拌机利用运动着的螺带强迫物料颗粒分别从各个方向(环向、径向和轴向)产生运动,尤其是竖向的物料提升效果明显,使各物料颗粒运动的方向、速度不同,相互之间产生剪切滑移以致相互穿插、扩散,从而使各物料均匀混合。
混合型混凝土强制搅拌机综合了铲子型搅拌装置和螺带式搅拌装置的优点,既结合了螺带叶片旋转时上下翻腾物料强烈的效果,又综合了铲子叶片内外交汇强烈的效果,从而更加利于各物料的混合均匀。
2 三种立式搅拌装置模型的建立
笔者所建立的模型是基于单立轴螺带式搅拌主机、单立轴叶片式搅拌主机及其单立轴混合型搅拌主机。根据搅拌主机对搅拌混凝土的时间以及均匀性要求,三种搅拌装置均采用六搅拌臂结构,并结合实际试验情况,建立如图1所示的三种立式搅拌装置的三维立体模型。

图1 三种立式搅拌装置的三维模型
3 EDEM仿真分析
3.1 物料颗粒简化模型以及接触模型的选择
搅拌过程中,从混合物的状态变化来看,总是伴随着搅拌均匀与物料离析两种现象的矛盾运动,故在简化模拟搅拌机的搅拌过程时,选择合理模型的简化对模拟效果有很大的影响。
对搅拌过程进行模拟时,混凝土颗粒有软球模型以及硬球模型两类颗粒简化模型。其中软球模型把物料颗粒之间的法向力简化为弹簧和阻尼器,切向力简化为弹簧、阻尼器和滑动器,从而在采用软球简化模型进行搅拌过程模拟仿真时会引入弹性系数以及阻尼系数等参量,通过这些参量的设置,可以最大程度的还原搅拌过程中物料颗粒之间的接触情况。而硬球简化模型则完全忽略物料颗粒接触力大小和物料颗粒表面变化细节,即将物料接触过程简化成瞬间完成的碰撞过程,故主要适用于快速运动、低浓度颗粒体系的数值模拟。
在实际搅拌机的物料搅拌过程中,物料颗粒之间有碰撞也有摩擦,由于水分的添加在颗粒之间也存在着一定的黏结力。水泥混凝土的搅拌过程中物料颗粒之间有一定的黏结力,可以阻止物料颗粒的切向与法向的相对运动,当外作用力达到甚至超过物料颗粒之间的最大法向与切向力时这种黏结就会被破坏掉。结合以上两种颗粒简化模型的叙述,选择软球简化模型比较合理,且Hertz-Mindlin黏结接触模型的特点恰好符合混凝土颗粒之间接触的特点[4-5]。
3.2 EDEM软件对模型进行分析
3.2.1 EDEM 仿真参数的确定
离散元EDEM软件对物料搅拌仿真能够反映混凝土中每个颗粒在搅拌筒内的运动轨迹,选择合适的颗粒简化模型以及接触模型可以较好的模拟物料颗粒与颗粒之间和颗粒与周围环境之间的碰撞。结合三维建模软件PROE,建立模拟仿真中所需要的三维模型,如图1。
实际系统的仿真的过程,合理的材料的力学性质能保证仿真结果,三种立式搅拌装置在模拟仿真中所涉及的各部分结构的材料材质都应该一致,并且投放的混凝土颗粒数目也一致。根据实际搅拌装置的线速度要求,设定三种立式搅拌装置的转速均为20 r/min[5],在材料性质、颗粒数目以及布置方式等条件一致时,研究物料颗粒在搅拌筒内不同时间的分布情况。模型投入的颗粒数是按1 m3的机型计算得出的,并根据物料颗粒的直径进行涂色,其中较小的颗粒(~10 mm直径)投放20000颗;中颗粒(~15 mm直径)投放10 000颗;大颗粒(~20 mm直径)投放5 000颗。
3.2.2 三种立式搅拌装置的物料流动比较
选取一组的时间截取如图2所示以展示三者之间物料流动的不同之处。由三组截图可知:在同等条件下,立式混合型搅拌装置结合了其他两种搅拌装置的各自优点,在竖向、径向以及交汇区的物料搅拌均有较好的搅拌流动趋势。

图2 三种立式搅拌装置的物料轴向流动视图
通过截取三种立式搅拌装置搅拌物料24 s后卸料视图如图3所示,进行对比可知:立式六铲子型搅拌装置的卸料效果最佳。但卸后的物料进行网格划分并进行各物料颗粒的均匀度标准偏差分析,可得到以下关系如表2所列,可以得知三种不同形式的搅拌装置在进行完24 s搅拌并卸料后,立式混合型搅拌装置的搅拌效果最佳。
根据实验室对纯螺带式搅拌装置以及纯铲子式搅拌装置所进行的试验研究,发现两者各有优点:前者对物料的提升效果以及两搅拌腔之间的交汇效果强烈如图4所示,后者对物料在径向方向的交互效果以及卸料效果明显如图5所示,立式混合型搅拌装置 结合了以上两种搅拌装置的优点。

表2 三种立式搅拌装置卸料后的各颗粒的均匀度标准偏差
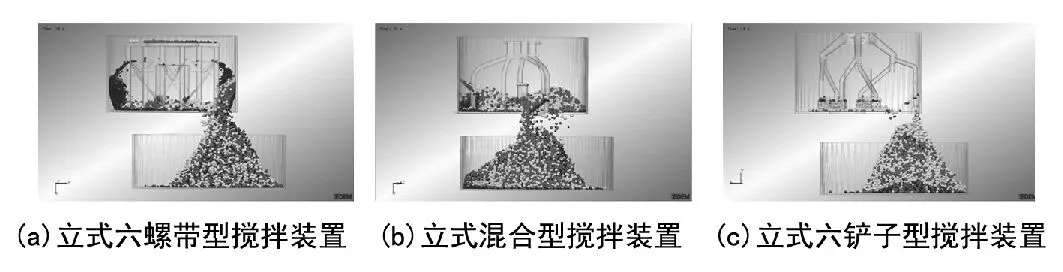
图3 三种立式搅拌装置搅拌24s后物料均匀比较
图4 立式螺带搅拌装置的搅拌物料流动图

图5 立式铲子型搅拌装置搅拌物料流动图
3.2.3 立式搅拌装置混合均匀度随时间变化的分析
根据EDEM软件模拟的结果,分别得出10 mm、15 mm以及20 mm三种粒径的颗粒在三种立式搅拌装置的搅拌过程中,混凝土物料搅拌混合均匀度标准偏差随时间变化的趋势,如图6所示。根据以上分析,可以得知:在相同试验条件下,立式混合型搅拌装置对三种粒径颗粒的搅拌均匀性效果最佳。
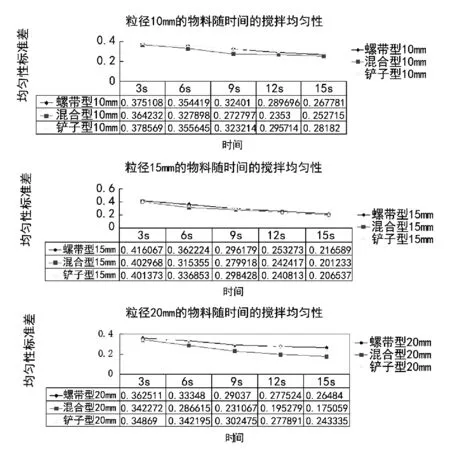
图6 三种立式搅拌装置的物料混合均匀度标准偏差随时间变化的趋势如图
3.2.4 立式搅拌装置在搅拌过程中的搅拌阻力模拟
通过EDEM软件对三种立式搅拌装置进行物料流动模拟仿真,可测得搅拌装置随时间的搅拌阻力变化趋势,并依据仿真得出的搅拌阻力趋势可得立式六铲子搅拌装置的搅拌阻力波动比较大,立式六螺带搅拌装置以及立式混合型搅拌装置的搅拌阻力较为平稳,搅拌阻力平稳更利于混凝土的搅拌。
4 结论
(1)立式混合型搅拌装置的物料流动综合了立式六铲子型搅拌装置和立式六螺带搅拌装置的优点,在竖向、径向以及交汇区均有较好的流动效果,在同等条件下立式混合型搅拌装置的搅拌效果最佳,尤其是对大骨料颗粒的搅拌效果更为明显。
(2)对于立式混合型搅拌装置的搅拌阻力在搅拌过程中最为平稳,对搅拌过程中的搅拌装置受力情况有利。
故具有合理机构的立式混合型搅拌装置是一种理想的适用于强制式立式混凝土搅拌主机中的搅拌装置形式。
[1] 冯忠绪.混凝土搅拌理论与设备[M].北京:人民交通出版社,2001.
[2] 中国建筑科学研究院.GB/T9142-2000混凝土搅拌机[S].北京:中国标准出版社,2000.
[3] 赵 健,李 刚.双卧轴强制式搅拌机物料流动的分析模拟[J].机电产品开发与创新,2009,22(1):66-67.
[4] 胡国明.颗粒系统的离散元素法分析仿真[M].武汉:武汉理工大学出版社,2010.
[5] 杨亚敏,赵 方,段德荣,等.基于EDEM的立轴破碎机转子对物料粒径加速效果的研究[J].装备制造技术,2012(7):31-33.
[6] 冯忠绪,王卫中,姚运仕.搅拌机合理转速研究[J].中国公路学报,2006,19(2):97-100.
猜你喜欢
——辽宁省博物馆藏中国古代立轴山水画展
中华书画家(2022年4期)2022-04-21 09:31:06
民间故事选刊(2021年9期)2021-11-12 12:16:15
艺术生活-福州大学厦门工艺美术学院学报(2021年1期)2021-07-21 03:18:32
课外生活(小学1-3年级)(2019年6期)2019-07-19 18:59:10
天津诗人(2018年4期)2018-12-12 09:30:14
伴侣(2018年2期)2018-02-28 20:38:24
优雅(2018年2期)2018-01-30 12:26:26
凿岩机械气动工具(2017年3期)2017-11-22 07:21:29
故事会(2016年15期)2016-08-23 08:49:39
祝你幸福·知心(2016年3期)2016-03-29 09:31:28
