
智能语音巡检机器人系统的设计与实现
2015-06-08 09:58钟修皓王晓虹刘文壮
电子设计工程 2015年15期
钟修皓,王晓虹,刘文壮,张 锡,张 彤
(辽宁石油化工大学 计算机与通信工程学院,辽宁 抚顺 113001)
近年来随着人工智能技术、计算机技术等相关技术的发展,对移动机器人的研究越来越多。智能语音巡检机器人可有效地应用在石化、油田、核工业等行业中,尤其在管道、罐体塔体等人员不方便到达的区域,智能语音机器人可以发挥其优势。本系统可以通过语音来指挥现场的巡检机器人进行图像采集、准确的测试周围环境相关参数、全方位查看容器内部的损伤等情况,从而可以减少意外事故的发生。与常规的无损检测设备相比,系统引入了多传感器系统的智能语音机器人,在检测灵活性和可靠性上有不可比拟的优势。而且,系统检测的数据的准确性非常高。经过现场实验表明,该系统智能化程度高,运动稳定可靠,本系统具有很高的推广价值,有广阔的应用前景。目前,国内外对环境、设备等的安全监测问题一直是重要的研究方向。
1 系统方案
1.1 系统的功能设计
本系统的基本功能是采用智能语音机器人对监测介质的指标数据进行监测,通过USB摄像头全方位采集对象的重要部位图像,通过运行客户端、建立连接,由此不断获取服务器传回的视频信息,得到直观的介质实际情况。通过各种传感器获得当前介质的重要信息,并且通过这些重要信息对监测对象进行危险系数评估,从而为监测对象的安全运行提供精确和有力的技术支撑。
智能语音机器人主要是通过语音识别进行控制行走。机器人的控制主要是通过语音识别指令,机器人再根据指令执行相应的动作,控制是通过附加在MCU上的语音模块来实现。客户端监控为用户提供远程视频监控服务,进一步扩展了视频监控的使用范围。将PC机通过IP网络与服务器相连,可以远程播放。
系统功能结构图如图1所示,系统主要包括视频采集模块、指标体系数据采集模块、机器人控制模块、中控端控制模块、移动终端控制模块、数据处理模块、语音识别模块、通信模块等。
系统的每个模块都包含一个或多个线程,有些线程在系统运行之初就开始运行(如视频采集线程);有些线程在一定的条件下才被启动。系统可以通过多线程函数在一定条件下实现相关线程的阻塞或唤醒,从而只运行那些有用的线程,使系统的效率大大增加。
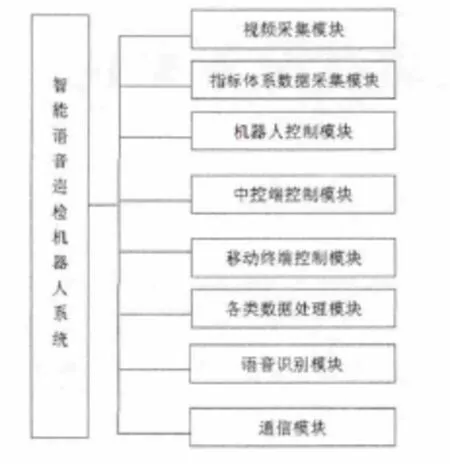
图1 系统功能图Fig.1 System function diagram
1.2 系统硬件框图
智能语音巡检机器人系统采用的硬件平台是基于ARM体系结构,采用Samsung S3c6410嵌入式微处理器。系统采用两层架构,上层以S3C6410为核心,负责图像采集等工作,并将图像通过Wi-Fi方式发送给PC机,通过语音模块来完成语音的采集、识别、命令发送。下层以直流电机驱动板为核心,控制机器人的运动以及传感器数据处理。系统的硬件框图如图2所示,以ARM 6410处理器为核心,外围连接各种传感器模块、语音模块、直流电机模块、视频采集模块、无线传输模块等。
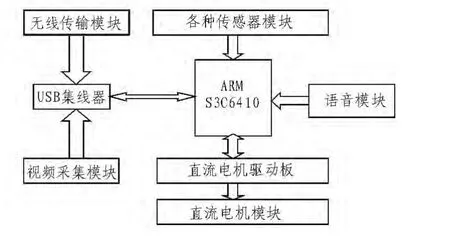
图2 系统硬件结构图Fig.2 Hardware structure of the system
2 系统实现关键技术
2.1 视频采集
Video4Linux(简称V4L),是Linux中关于视频设备的内核驱动[1-2]。Video4Linux是为市场现在常见的电视捕获卡、并口及USB口的摄像头提供统一的编程接口。同时也提供无线电通信和文字电视广播解码和垂直消隐的数据接口。摄像头安装在云台上,通过程序可控制摄像头的位置,进而控制摄像的角度,采集到不同角度的图片。根据Video4Linux标准接口编程,再对采集的图像进行阀值比较,判断图像是否变化,从而决定是否需要存入图像缓冲区。
为了进一步提高视频数据的传输速度和实时性,采集视频时利用视频设备的双缓冲达到边传输边采集的效果。同时设计一个内存缓冲池,视频采集图像经过JPEG压缩后将数据保存到缓冲池中,视频传输的数据从该缓冲中获取。
2.2 各种指标数据采集
系统安装了各种传感器(如温湿度传感器、气体传感器、红外传感器、烟雾传感器等)来采集相应的数据作为监测被控对象的重要指标。如温湿度传感器通过IIC总线与MCU相连,采取GPIO静态驱动方式,全量程校准,全静态时序控制,测量结果精确。烟雾传感器使用MCU的外部中断,在驱动需要预热,当检测到有危险气体的,触发外部中断,开始报警。
2.3 无线通信
本系统中的无限传输采用的是Wi-Fi技术。相比于其他无线通信技术,Wi-Fi的覆盖半径则可达300英尺左右约合100 m,其覆盖范围比较广。数Wi-Fi据传输速度快,可以达到11 mbps。这些都很适用于本系统,特别是在报警的时候,可以及时将相关的重要数据传回到中控端和移动终端[3-4]。
2.4 语音识别及语音控制
2.4.1 语音模块设计思路
在此系统中,将语音模块直接接到ARM6410上,并通过此主板对机器人进行语音控制,这样,就能更便捷地控制机器人而不会像使用PC控制那么繁琐。在实现中,会采用一种语音识别平台,通过该平台对语音数据进行识别,使用开发板的串口连接并且驱动机器人。
2.4.2 语音模块架构
语音模块作为本系统的主要特色,此处主要采用基于ARM11的语音识别技术[5-6]。由于本系统采用S3C6410作为MCU,其主频达到667 MHz,并且具有丰富的接口。智能语音巡检机器人主要由开发板的麦克风接口对语音进行采集,通过此处的语音模块对采集的语音数据进行处理,然后通过内部编程由串口向机器人发送相关的指令来驱动电机,从而实现机器人的前进、后退、左转、右转等语音控制。
2.4.3 实现流程
语音识别的过程是将人类的自然语言转化数据信息的过程,语音识别技术也可以简单描述为Voice-Instructions的识别。语音识别处理的过程为控制着通过麦克风等输入设备输入语音信号,然后语音模块通过接收器接收语音信号,然后将信号信息传入语音识别平台,由该平台将语音数据信息进行相关的处理,从而实现对机器人的控制。实现流程如图3所示。
2.5 移动机器人控制
移动机器人上层采用语音控制,下层的硬件采用直流电机控制机器人的动作。硬件驱动板主要采用双Ha桥直流电机驱动芯片,它具有带载能力强的特点。LKV-HM3.0双H桥直流电机驱动板采用ST公司的L298N典型双H桥直流电机驱动芯片,可用于驱动直流电机或双极性步进电机,此驱动板的特点是体积小,重量轻,具有强大的驱动能力。
移动机器人下层控制主要由电机的开关控制、电机转向控制、电机转速控制组合起来的。通过PWD的调速来控制机器人的左转、右转、后退、前进、转弯等动作。

图3 语音识别流程Fig.3 Speech recognition process
3 结束语
文中研究设计了智能语音机器人系统。系统在以S3C6410为核心的嵌入式硬件平台上构建了一个适合本系统开发要求的嵌入式Linux系统软件平台。系统使用USB摄像头进行图像采集;摄像头带云台,可控制摄像的角度;采用无线数据传输方式;主板采用S3C6410处理芯片,可以轻松应对视频采集,视频处理,无线传输等功能。而且可扩展能力强,多种传感器模块,并支持传感器扩展,Linux操作系统支持。系统的适用性很强,可随时调整摄像头的位置,拍摄不同角度的画面,并且可随时调节画面的亮度和对比度,这使系统的使用更灵活。系统采用语音来控制机器人的行动,从而可灵活地显示当前监测对象的现场情况,尤其是人工不易到达的区域,系统准确性高,适用性强。但是语音识别模块然目前还存在识别率不够高的问题,还需要进一步去设计和改进。
[1]张永强,赵永勇,李崇德.嵌入式远程视频采集系统的设计与实现[J].现代电子技术,2006(4):75-77.ZHANG Yang-qiang,ZHAO Yong-yong,LI Chong-de.The design and implementation of embedded remote video acquisition system[J].The Modern Electronic Technology,2006(4):75-77.
[2]刘洁瑜,王黎明,钱培贤,等.基于MJPEG2000嵌入式网络视频采集压缩系统的设计与实现[J].微电子学与计算机,2004,21(12):168-173.LIU Jie-yu,WANG Li-ming,QIAN Pei-xian,et al.The design and implementation of embedded network video collection and compression system Based MJPEG2000[J].Microelectronics and Computer,2004,21(12):168-173.
[3]俞辉.嵌入式Linux程序设计案与实验教程[M].北京:机械工业出版社,2009.
[4]陈卓,王田,梁新元.嵌入式系统开发[M].北京:电子工业出版社,2009.
[5]蔚健,刘志勤.基于ARM11的智能语音识别机器人教学平台设计[J].软件导刊,2013,12(5):96-98.WEI Jian,LIU Zhi-qin.The design of intelligent speech recognition robot teaching platform based on ARM11[J].Software Tribune,2013,12(5):96-98.
[6]贾艳丽,杨明刚.景点智能语音导航器设计[J].微型机与应用,2012,31(15):21-23.JIA Yan-li,YANG Ming-gang.The design attractions intelligent voice navigation device[J].Micro Computer and Application,2012,31(15):21-23.
猜你喜欢
大电机技术(2022年5期)2022-11-17
阅读(快乐英语高年级)(2019年5期)2019-09-10
电子制作(2019年14期)2019-08-20
电子制作(2019年9期)2019-05-30
小说界(2018年5期)2018-11-26
铁道通信信号(2018年2期)2018-04-18
电子制作(2017年1期)2017-05-17
电镀与环保(2016年3期)2017-01-20
电子制作(2016年1期)2016-11-07
电机与控制应用(2015年10期)2015-03-01
