
基于神经网络技术的电机直接转矩控制系统研究
2015-06-01 10:50邱祥王斌王茂祥李多贵朱金荣
现代电子技术 2015年13期
邱祥,王斌,王茂祥,2,李多贵,朱金荣
(1.扬州大学物理科学与技术学院,江苏扬州225002;2.中国移动通信集团江苏有限公司,江苏南京210029;3.扬州广播电视总台技术传输中心,江苏扬州225009)
基于神经网络技术的电机直接转矩控制系统研究
邱祥1,王斌1,王茂祥1,2,李多贵3,朱金荣1
(1.扬州大学物理科学与技术学院,江苏扬州225002;2.中国移动通信集团江苏有限公司,江苏南京210029;3.扬州广播电视总台技术传输中心,江苏扬州225009)
传统的电动机直接转矩控制系统存在一些问题,比如转矩脉动较大、磁链观测不精确、开关频率不固定等,影响了控制系统整体性能的进一步提升。为此,结合神经网络技术,设计了近似圆形磁链的直接转矩控制系统优化方案,探讨采用BP神经网络实现电压矢量选择的功能。该方案采用滞环比较器对磁链进行调节并实现转矩调节,建立了空间电压矢量选择的最优方式,设计了神经网络空间电压矢量选择器结构,提出采用神经网络理论取代传统开关表的方法。系统仿真结果表明,优化后的系统能够有效降低转矩脉动,定子磁链轨迹的脉动成分也明显下降,在低速运行状态下同样取得了较好的效果,表明该系统达到了调速性能改善和整体性能提升的目的。
电动机;直接转矩控制系统;神经网络技术;优化方案
0 引言
目前我国电动机装机总容量已达4亿kW以上,年耗电量达1.2万亿kW·h,占全国总用电量的60%,占工业用电量的80%。但是,我国80%以上的电动机产品效率比国外先进水平低2%~5%,电动机控制系统效率比国外先进水平低10%~20%。因此,如何有效改进我国电动机系统功能、提升其运行效率显得尤其重要。随着电力电子技术的发展,对异步电动机的变频调速技术有了较大推动作用,先后经历了电压频率协调控制[1⁃2]、转差频率控制[3⁃4]、矢量控制[5⁃6]及直接转矩控制[7⁃8]等阶段。此外,随着人工神经网络、模糊控制等智能控制理论的快速发展,其在调速系统中也逐步被尝试和应用。
神经网络具有无参数化、实施简单、工程性强、容错能力强、自组织与自学习等优点。本文基于神经网络技术的应用,利用其较高的自学习和自适应能力,对传统电机直接转矩控制技术进行了改进,提出了基于神经网络的系统改进方案,即利用神经网络的自学习和函数逼近能力对开关表、定子磁链观测模型以及速度闭环控制进行优化,克服了传统的直接转矩控制系统转矩脉动较大、磁链观测不精确、开关频率不固定等问题,有效提升了电动机控制系统的性能。
1 系统优化方案设计
德国鲁尔大学学者M.Depenbrock于1985年率先提出了直接转矩控制理论,并在1987年推广到弱磁调速范围。该控制理论控制定子磁链沿六边形轨迹运动。此后,直接转矩控制技术不断得以优化和提高。目前,直接转矩控制技术已经进入实际应用阶段。
在实际控制中,直接测量电磁转矩和定子磁链在制造工艺和测量技术上都有很大的困难,测量误差很大。通常在电动机调速系统中较为容易获得定子电压、电流、转速等参量,因此在实际测量中一般采用间接观测方法,即建立一个转矩和磁链的观测模型,根据相关参量来计算得到磁链和转矩的实时值[9]。本文在研究直接转矩控制系统的基本原理和定子磁链观测模型的基础上,设计了近似圆形磁链的直接转矩控制系统优化方案,如图1所示,并给出了磁链调节和转矩调节的具体方法,以及控制系统空间电压矢量的具体选择方法。
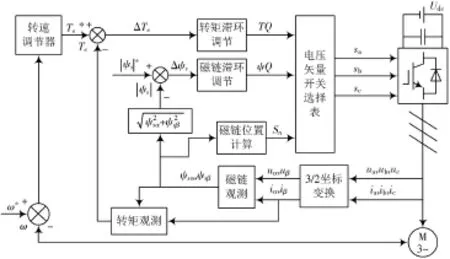
图1 直接转矩控制系统优化方案示意图
本优化方案中的近似圆形磁链的直接转矩控制系统采用双闭环方式控制,外环为速度闭环控制,内环为磁链和转矩闭环控制,通过3/2坐标变换将采集到的电动机三相电压电流信号变换到两相静止坐标系下,得到磁链观测及转矩观测的相关输入参数,再通过相关观测模型、磁链位置计算以及滞环比较器等,共得到三个输出量:磁链响应信号、转矩响应信号以及扇区号,从而根据开关表得到相应的逆变器输出电压开关信号实现对异步电动机的直接转矩控制,提高电动机性能。
此外,考虑到BP神经网络的强大功能,尝试采用BP神经网络实现电压矢量选择的功能,设计三层前向BP神经网络的输入和输出(神经元个数可为3),进行电压矢量选择器模型的重构。设计的神经网络空间电压矢量选择器结构如图2所示。在该优化方案中,可将ψQ,TQ和Sn作为神经网络的输入信号,功率管的控制信号Sa,Sb和Sc作为神经网络的输出。
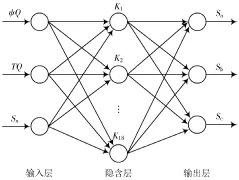
图2 神经网络空间电压矢量选择器结构图
2 系统主要模块分析
2.1 磁链调节模块分析
直接转矩控制系统的磁链控制采用bang⁃bang控制,因此磁链的动态响应很快。本方案采用滞环比较器对磁链进行调节,其实际上是一个施密特触发器,对磁链幅值进行两点式调节,其输入为定子磁链给定值与反馈值|ψs|这二者的差值Δψs,输出为磁链响应信号ψQ。该比较器的容差宽度为±εψ,具体的输入输出关系见表1。
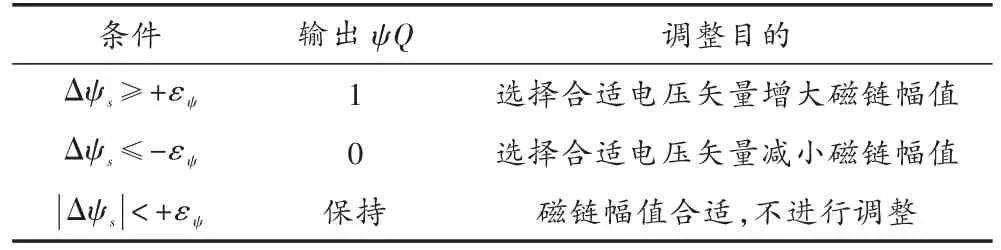
表1 磁链滞环比较器的输入输出关系
2.2 转矩调节模块分析
本方案中,转矩调节也采用滞环比较器实现,但是与磁链调节不同的是其增加了零矢量,采用了三点式调节来降低转矩中的脉动成分,调高系统控制性能。其输入为给定转矩Te*和反馈转矩Te的差值ΔTe,输出为转矩响应信号TQ。该比较器的容差宽度为±εT,具体的输入输出关系见表2。
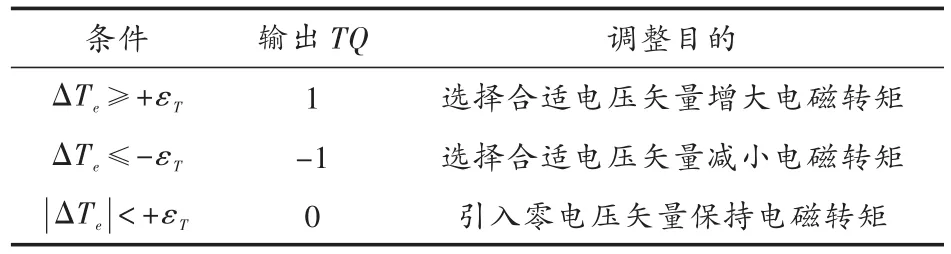
表2 转矩滞环比较器的输入输出关系
2.3 空间电压矢量的选择分析
在近似圆形磁链轨迹的直接转矩控制中,功率管的开关频率相对六边形磁链要高,空间电压矢量选择不当会增加转矩脉动成分和开关次数,因此空间电压矢量的选择至关重要,最优的选择方式可以得到脉动量小的转矩和圆形磁链轨迹,并有效降低功率管开关次数。根据输出的磁链响应信号ψQ、转矩响应信号TQ和扇区号Sn制定的最优空间电压矢量开关选择表,如表3所示。

表3 电压矢量开关选择表
当需要将直接转矩控制技术在微处理器中实现时,可以将最优空间电压矢量开关选择表存储在存储器中,这样在读取ψQ,TQ,Sn后可以方便快捷地查找到需要的输出电压矢量,确定电压逆变器模型中相关参数的值,有效控制逆变器的输出。
2.4 神经网络空间电压矢量选择器分析
本文的电机直接转矩控制系统优化方案中,设计了神经网络空间电压矢量选择器结构,提出了采用神经网络理论取代传统开关表的方法,该方法学习性强,对工程人员经验依赖性低。结合前述分析,设计三层前向BP神经网络的输入和输出神经元个数为3,进行电压矢量选择器模型的重构。采用trainlm函数对样本进行训练,最大训练次数设定为2 000,根据隐含层神经元个数的不同,得到相应的网络误差,如表4所示。

表4 不同隐含层神经元个数时的网络误差和训练次数
可以看出,在隐含层个数达到17个以后,训练次数迅速下降,网络误差迅速减小。为了今后在嵌入式系统中更好地实现相关性能,减少系统开销,并综合考虑网络误差和训练次数,可选择隐含层神经元个数为18个,此时训练次数只需要122次即可达到相当小的训练误差。
3 结论
目前,电动机直接转矩控制技术由于其具有系统简洁、鲁棒性强、静态性能和动态响应性能好等优点,在异步电动机调速控制中逐步得到了应用。但是,传统的直接转矩控制系统存在一些问题,比如转矩脉动较大、磁链观测不精确、开关频率不固定等,影响了系统整体性能的进一步提升。因此,研究如何提升传统直接转矩控制系统的性能具有重要的意义。
本文通过对系统相关模型和思想的分析,计了近似圆形磁链的直接转矩控制系统优化方案。同时,引入了人工神经网络理论,采用BP神经网络实现电压矢量选择的功能,进行电压矢量选择器模型的重构。对磁链调节、转矩调节、空间电压矢量的选择及神经网络空间电压矢量选择器进行了分析。结合采用Matlab/Simulink仿真平台,进行系统优化方案的仿真分析,结果表明,优化后的系统能够有效降低转矩脉动,定子磁链轨迹的脉动成分也明显下降,在低速运行状态下同样取得了较好的效果,表明该系统达到了调速性能改善和整体性能提升的目的。
[1]周元钧.交流调速控制系统[M].北京:机械工业出版社,2013.
[2]CHUN T W,CHOI B K,BOSE B K.A novel start⁃up scheme of stator flux oriented vector⁃controlled induction motor drive without torque jerk[C]//Record of 2001 IEEE Conference on Industry Applications.Chicago:IEEE,2003,1:148⁃153.
[3]LIU X J,FELIPE L R,CHAN C W.Model reference adaptive control based on neuron fuzzy networks[J].IEEE Transactions on Systems,2004,34(3):302⁃309.
[4]薛秀梅.异步电动机直接转矩控制策略研究[D].焦作:河南理工大学,2011.
[5]李夙.异步电动机直接转矩控制[M].北京:机械工业出版社,1998.
[6]郑勇.基于SVPWM的异步电机直接转矩控制系统的研究[D].太原:太原科技大学,2013.
[7]何志明,廖勇,向大为.定子磁链观测器低通滤波器的改进[J].中国电机工程学报,2008,28(18):61⁃65.
[8]ROMERAL L,ARIAS A,ALDABAS E.Novel direct torque control scheme with fuzzy adaptive torque⁃ripple reduction[J]. IEEE Transaction on Power Electronics,2003,50(3):487⁃493.
[9]刘爱华.基于定子磁链低通滤波观测的直接转矩控制系统研究[D].长沙:湖南大学,2005.
Study on motor direct torque control system based on neural network technology
QIU Xiang1,WANG Bin1,WANG Maoxiang1,2,LI Duogui3,ZHU Jinrong1
(1.School of Physical Science and Technology,Yangzhou University,Yangzhou 225002,China;2.Jiangsu Limited Company of China Mobile Group,Nanjing 210029,China;3.Technology Transfer Center,Yangzhou Radio and Television Station,Yangzhou 225009,China)
S ince traditional motor direct torque control system has some problems,such as large torque ripple,inaccu⁃rate flux linkage observation,unfixed switching frequency,which influence on the integral performance improvement of control system further.Therefore,in combination with neural network technology,the direct torque control system optimization scheme which approximates circular flux linkage was designed.Voltage vector selection function realized by BP neural network is dis⁃cussed.The system adopts hysteresis comparator to adjust the flux linkage and achieve torque control.The optimal manner for space voltage vector selection was established,then the structure of space voltage vector selector was designed.The method of using neural network theory instead of traditional switching table is proposed.System simulation results show that the optimized system can reduce torque ripple effectively,and the ripple component in stator flux trajectory is also decreased significantly. Good effect is acquired in low⁃speed operating condition.The system achieves the improvement of speed regulation performance and the promotion of the integral performance.
motor;direct torque control system;neural network technology;optimization scheme
TN876⁃34
A
1004⁃373X(2015)13⁃0107⁃03
邱祥(1989—),男,江苏徐州人,硕士。研究方向为嵌入式系统。
王斌(1988—),男,江苏徐州人,硕士。研究方向为嵌入式系统。
王茂祥(1967—),男,江苏句容人,研究员级高级工程师,博士,硕士生导师。研究方向为光电技术。
李多贵(1967—),男,江苏扬州人。研究方向为电子技术。
朱金荣(1968—),男,江苏靖江人,副教授。研究方向为光电技术、自动控制。
2015⁃01⁃19
江苏省教育厅高校科研成果产业化推进工程项目(JHB2012⁃43)
猜你喜欢
家教世界(2023年25期)2023-10-09
中国特种设备安全(2022年3期)2022-07-08
数码世界(2018年5期)2018-06-04
阅读(低年级)(2018年5期)2018-05-14
电脑与电信(2017年6期)2017-08-08
电测与仪表(2016年10期)2016-04-12
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
大学物理实验(2015年2期)2015-10-22
计算机工程与科学(2014年3期)2014-09-15
电测与仪表(2014年23期)2014-04-04
