
一种建筑塔吊地面操控装置的设计与实现
2015-05-30 17:48:41曾昭献马永军
科技创新与应用 2015年23期
关键词:物联网
曾昭献 马永军

摘 要:针对目前的建筑塔吊操作控制装置中操作人员工作环境恶劣,安全隐患大这一现状,文章设计了一种无需高空作业的地面操作控制装置,运用了实时高清数字视频处理、物联网、无线WIFI、51单片机微控制等技术,阐述了地面操控装置的结构和实现方法。
关键词:高清数字视频;物联网;硬盘录像机
1 概述
建筑塔吊是建筑机械的关键设备,在高层建筑施工中起着重要的作用,同时,对它的操控是建筑施工安全中最关键的因素。目前的建筑塔吊操作控制装置有两种作业方式:高空作业和现场遥控作业方式。高空作业方式,操作人员工作环境极为不便,在几十米高的踏架上爬上爬下,安全隐患大;现场遥控作业方式,操作人员视线有限,容易造成塔吊工作盲区和安全事故。
随着电子科技的迅速发展,高清数字实时视频监控、物联网、WIFI、微控制等技术在各领域里得到了广泛的应用,鉴于目前建筑塔吊操控方式存在的问题,文章提出了一种基于物联网技术,利用高清数字视频技术和无线传输技术,对施工现场画面实时传送和监控,能在地面进行操作的建筑塔吊操控装置的设计方案。
2 设计思路
本设计分两部分:塔吊施工现场视频监控部分和塔吊操作控制部分。
2.1 视频监控部分设计思路
操作人员在地面或室内通过安装在塔吊回旋机构四个方位的高清晰、高可靠性数字彩色摄像头来采集的施工现场实时图像,并传至硬盘录像机进行视频数据处理,根据在固定位置显示器或移动显示器上显示的图像,对塔吊进行操控。
2.2 塔吊操作控制部分设计思路
手动或遥控操作手柄发出操作指令,送入51单片机微控制芯片经数据处理输出驱动指令,以驱动塔吊的各功能电机正常工作。同时通过小车行程、塔臂回转角度、塔吊力矩、起升电机过载等传感器采集的数据送入51单片机微控制芯片经程序和数据处理发出驱动指令,以启动驱动机构和报警电路,保证塔吊的安全生产。
3 操控装置的硬件组成
系统硬件主要包括7个模块:视频图像采集模块、视频处理模块、视频显示模块、塔吊工作信息采集模块、操作模块、单片机系统、塔吊驱动及声光报警模塊。硬件组成如图1所示。
4 系统的设计与实现
4.1 视频图像采集
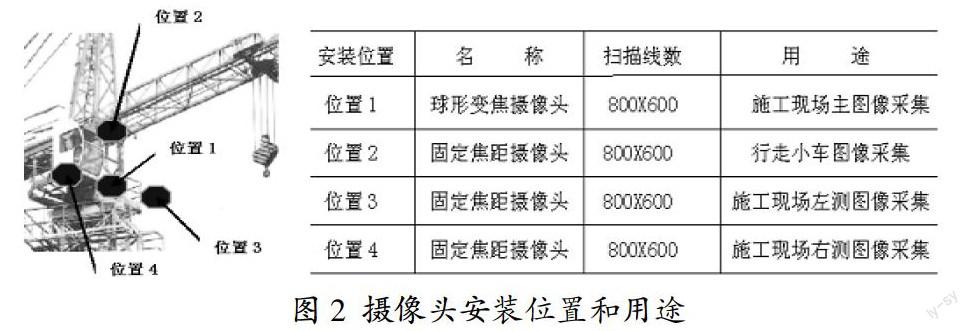
视频图像采集模块中四台摄像头的安装位置和用途如图2所示。所有摄像头采用高清晰彩色数字摄像头。所采集的施工现场视频图像接入硬盘录像机进行数据处理,球型摄像头配备云台控制器。
4.2 视频图像处理
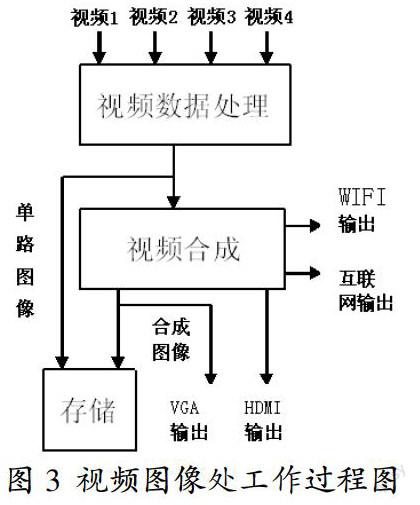
视频图像处理模块采用大华DH-NER硬盘录像机为视频图像主处理模块。该型硬盘录像机为嵌入式微控制系统,集计算机网络、视频数据处理、图像合成、存储、物联网等最新技术于一体,是本装置图像控制中心,可同时处理八路视频信号,输出一路VGA、一路HDMI视频。接入无线路由器,可输出无线WIFI信号。施工现场采集的四路图像接入硬盘录像机,经数据处理,视频显示合成,一路输出至大屏幕显示器,一路经无线路由器输出至移动显示器,视频格式为MPEG4,无线传输速率达500KB。同时通过TCP/IP协议接入Internet,实现建筑管理人员的远程监控。视频图像处理工作过程如图3所示,硬盘录像机操作主界面如图4所示。
4.3 视频显示
根据装置的设计要求,需要对施工现场的视频图像进行高清晰彩色显示。硬盘录箱机VGA输出信号分辨率最大为:1280x1024。所选用的显示器具有以下性能:最佳分辨率: 1680x1050,视频接口: D-Sub(VGA),DVI-D。本装置主显示器选用SAMSUN 24寸彩色显示器,辅助显示器选用SAMSUN 21寸彩色显示器,移动显示器选用Lenovo/联想 A7600 A10-70十寸四核平板电脑。移动显示器通过WIFI接入硬盘录像机并浏览视频图像。
4.4 单片机微控制系统
单片机微控制系统是本装置操控的核心系统,本装置选用技术成熟,运行安全稳定可靠的8位8051单片机微控制系统。操作模块发出的指令,送入单片机系统进行运算和处理,发出指令以驱动塔吊各功能电机正常工作;同时塔吊工作信息采集模块也进入正常工作,当采集的信息出现异常时,单片机发出指令驱动自锁装置并安全报警,复位后,重新工作。信息的接入和输出连接8051单片机的并行I/O端口,操作控制接入口为:P1.0-P1.7;采集的信息接入口为:P2.0-P2.7;输出驱动接口为:P3.0-P3.3;遥控操作接入口为:串行接口。运行程序建立在C语言平台上开发。程序流程图如图5所示。
4.5 塔吊工作信息采集
塔吊工作信息采集模块是对塔吊工作时工作状态的信息采集,采集的数据内容:小车行程前后极限位置数据;塔臂旋转位置数据;力矩数据;起重过载数据。采集的数据信息通过A/D转换成二进制数码,接入8051单片机的并行I/O端口:P2.0-P2.7。电路原理框图如图6所示。
4.6 塔吊操作控制
本装置中有手柄操作和遥控操作两种方式,手柄操作采用左、右手分功能操作,左手柄操控塔臂旋转,右手柄操控小车行走和起重。手柄操作杆选用工业用操作杆。控制功能如图7所示。手柄发出的操控指令为二进制码直接接入8051单片机的并行I/O端口:P1.0-P1.7。遥控操作选用工业用塔吊遥控器,发射与接收采用自锁回路及高缜密集成电路,有安全码、汉明码等相应工业所需安全措施,遥控距离:100米,安全加密码:43亿组永不重复。遥控发射器将操作指令编码并无线发射,接收器收到信息并解码,再接入8051单片机的串行接口。
4.7 塔吊驱动电路和声光报警
塔吊驱动电路包括:小车行走和自锁、塔臂旋转和自锁、升降电机和自锁电路。单片机发出指令后,这些驱动电路相应动作,以驱动各功能电机工作。在本装置中延用高空操作方式塔吊成熟电路,与它不同的是控制电路接入方式,本装置中控制电路接入的驱动指令是8051单片机发出。由于8051单片机直接驱动大电流继电器困难,在8051单片机和大电流继电器之间加了一级驱动电路。声光报警直接由单片机完成,通过单片机运行程序产生1KHz信号驱动蜂鸣器,同时在P3.4端口输出一个高电平驱动LED,实现声光报警。
5 结束语
本装置将视频数字监控、物联网、无线WIFI、单片机微控制技术融合在一起,它的实现,不仅大大改善了塔吊操作人员的工作环境,同时也减少了塔吊操作人员安全隐患。因为有了视频存储,有利于安全事故的调查和远程管理。提高了管理效率和效益,对高层建筑的安全生产有着重要的意义。
参考文献
[1]陈海宴.51单片机原理及应用[M].北京:航空航天大学出版社,2012.
[2]倪志莲.单片机系统设计与制作[M].北京:机械工业出版社,2010.
[3]张波,等.基于嵌入式的智能塔吊远程控制系统的设计[J].电子世界,2013(21):135.
作者简介:曾昭献,男,九江职业技术学院实验师,主要研究方向:应用电子技术。
马永军,男,九江职业技术学院教授,主要研究方向:单片机控制技术。
猜你喜欢
软件导刊(2016年9期)2016-11-07 21:56:29
软件导刊(2016年9期)2016-11-07 21:32:45
中国科技博览(2016年22期)2016-11-01 15:02:01
中国科技博览(2016年22期)2016-11-01 13:21:09
中国科技博览(2016年19期)2016-10-19 14:58:22
电脑知识与技术(2016年21期)2016-10-18 22:33:02
科技视界(2016年22期)2016-10-18 17:23:30
中国新通信(2016年16期)2016-10-18 11:01:39
中国新通信(2016年16期)2016-10-18 11:00:54
科学与财富(2016年28期)2016-10-14 01:24:06
