水下摩擦叠焊作业过程仿真系统设计
2015-05-15 03:14杨帆李彦胜黄江中宋国祥马丽
应用科技 2015年1期
杨帆,李彦胜,黄江中,宋国祥,马丽
海洋石油工程股份有限公司,天津 300452
水下摩擦叠焊作业过程仿真系统设计
杨帆,李彦胜,黄江中,宋国祥,马丽
海洋石油工程股份有限公司,天津 300452
为了缩短水下摩擦叠焊技术设备研制周期、节约试验费用、降低装置在海上试验和实际应用中的风险,设计了水下摩擦叠焊作业仿真系统。给出了系统总体设计方案,包含其主要工作内容和软硬件体系结构。开发了满足功能要求的仿真软件,介绍了软件的开发环境、功能和界面。通过一系列仿真实验以及缆索的受力及姿态分析,证明了系统的可行性。
摩擦叠焊;体系结构;缆索姿态;仿真系统
为确保我国能源安全,国家启动了“大型油气田与煤层气开发”科技重大专项。我国南海油气资源丰富,其中约70%蕴藏于深水区。深水海洋工程技术面临复杂的油气藏特性以及恶劣的海洋环境条件,而我国深水勘探开发能力远落后于国际先进水平,其原因除了技术与装备不足外,科研成果的产业化能力是一个更加严重的制约因素,因此,必须大力加强深水海洋工程技术与装备的产业化技术攻关。作为水下生产系统的重要组成部分,水下油气开发工艺装备已成为业界研究热点,市场需求也增长迅速[1]。在这样的背景下,国家大力投资于包括水下摩擦叠焊在内的水下生产系统安装作业装备,对于推动深水油气开发装备的产业化有着重要的意义[2]。
为了研制水下摩擦叠焊技术设备,在研究过程中利用仿真和水池试验来验证整个装置的可行性和可靠性,可以大大缩短海上试验的周期从而节约试验费用,同时也降低了装置在海上试验和实际应用中的风险[3]。在仿真试验中模拟吊装及作业的全过程,观察分析装置可能遇到和发生的各种情况,可以减少研发初期由于设计缺陷造成的设备损坏,及时发现系统设计、技术和工艺上存在问题,避免不必要的损失,优化完善系统的各个环节[4]。同时,一套完善的仿真系统可以起到对作业过程中的操作人员进行培训和模拟训练的作用,使吊装作业人员和潜水员熟悉作业过程。因此,在水下摩擦叠焊技术研究过程中,建立合理的水动力模型并通过仿真手段进行初步的研究开发显得尤为重要。
1 仿真系统总体方案
1.1 仿真系统开发的总体技术路线
水下摩擦叠焊作业的配套技术研究,包括环向运动导轨的扶持、与管道待修区域的接近、在海底管道校准框架上面的准确就位等技术问题,以及管道摩擦叠焊维修宏观场景监视技术等。摩擦主轴头与管道待修区域的合理初始相对位置,是高质量完成摩擦过程的基础条件,要求摩擦叠焊装置辅助夹钳就位精度必须满足焊接要求[5]。水下摩擦叠焊装置的水动力性能是保证就位精度、仿真过程准确程度和模拟训练效果的关键。因此实施过程中需要首先利用数值计算初步确定摩擦叠焊装置的水动力系数,再通过模型试验修正、补充和验证水动力系数。在此基础上进行水下焊接作业过程、摩擦叠焊修复过程的仿真和视景显示,风、浪、流海洋环境作用下作业装置系统的作业过程模拟仿真,同时完成水下摩擦叠焊监视系统。建立逼真的水面及水下视景和良好的人机交互环境,完成对吊装操作人员和潜水员的模拟训练。最后利用水池试验来验证无流和有流情况下吊装和焊接作业过程的可行性,根据实验结果对系统进一步改进以保证海上实验的顺利实施,上述总体技术路线如图1所示。

图1 水下摩擦叠焊作业仿真与监控技术路线示意图
1.2 仿真系统开发工作
为了实现深水摩擦叠焊系统作业过程的仿真和模拟训练需要开展如下的工作:
1)利用基于CFD的理论计算及水池实验等手段,确定水下摩擦叠焊系统中的工作支持母船、焊接设备及脐带缆/吊装缆的水动力参数,并在此基础上建立海洋环境下各子系统合理的动力学、运动学模型,同时对脐带缆、吊装缆与连接设备的作用力干扰进行建模。
2)以建立的系统动力学、运动学模型为基础,完成深水摩擦叠焊作业装置和水下焊接对象(油管)布放过程的仿真试验,对设备实际作业效果进行模拟。
3)完成深水摩擦叠焊作业装置系统作业过程的视景仿真,对脐带缆/吊装缆、摩擦叠焊作业装置受力以及分系统之间的相互作用力进行实时计算,从而完成运动状态的解算,完成整个焊接作业过程的仿真模拟。
4)完成风、浪、流海洋环境作用下作业母船作业状态的动态仿真,完成船—缆—作业装置系统的作业过程动态显示。
5)开展分布式仿真系统体系结构研究,建立深水摩擦叠焊系统的完整仿真环境,将前述工作纳入统一的仿真框架之内,完成仿真系统内数据、信息的高效传输和模拟真实海洋环境下的视景仿真。
2 仿真系统体系结构
2.1仿真系统硬件体系结构
仿真系统由三通道投影视景显示系统、水动力计算模块和实时操控模块组成。其中三通道投影视景显示系统是通过3台投影机形成母船及焊接装置视景效果的正投无缝拼接。仿真系统的硬件体系结构如图2所示,主要包含以下设备。
投影幕:根据空间情况采用一个无缝的宽幅平面高对比度硬质正投金属屏幕,弧长8.5m,高2.8m。
投影机:采用松下PT-FD605 6500流明,双灯源光学系统,DLP投影机。该机器应用于融合系统中最大优点是:高亮度、高画质、高稳定性、色彩匹配自动调节、液体冷却系统、自动清洁过滤器等。
USTECH边缘融合机:对输入到投影机的图像进行边缘融合、几何校正、画面分布势/布局、画面组合、图文显示等。
图形工作站:采用3台HP Z800图形工作站,负责完成仿真计算和仿真图形生成。

图2 三通道投影视景显示系统
2.2 仿真系统软件体系结构
仿真系统需要完成母船的水动力计算、缆索的水动力计算、焊接装置的水动力计算和仿真海洋环境及视景的生成。仿真软件系统的体系结构如图3所示,系统的主要功能模块有母船仿真、缆索仿真、焊接装置仿真、视景仿真、海洋环境仿真等。这些仿真模块在运行过程中由平台信息管理中间件协调管理。信息管理中间件为这些模块提供仿真管理服务、信息管理服务和仿真运行服务。由中间件统一接受仿真控制指令和任务计划,根据信息管理服务提供的信息传递序列发送给各仿真模块,各仿真模块在仿真运行服务的协调和调用下实现一次仿真任务,计算结果由信息管理服务根据需要保存到数据库中作为历史数据。在系统初始化阶段由仿真管理服务根据仿真实体数据库中的初始化信息对各仿真模块进行初始化。

图3 仿真系统软件体系结构
3 水下摩擦叠焊仿真实验
在Windows XP操作系统上,在VC6.0开发平台上,利用Multigen Vega 3.7作为仿真视景构建工具,Multigen Creator 2.6作为仿真视景模型的建模工具,开发了水下摩擦叠焊仿真软件,进行仿真试验和操作模拟训练。
在仿真软件中可以设置流速和流向,有义浪高和波浪方向等作业环境,能够观察装置吊装和就位过程中装置的姿态,软件的人机交互界面如图4所示。
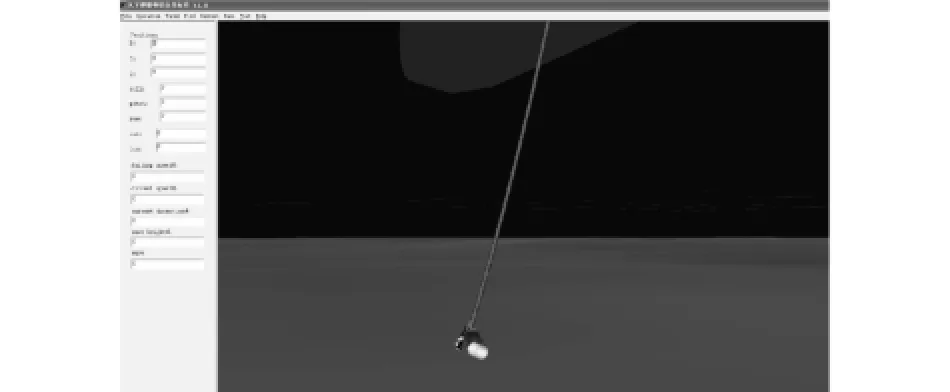
图4 仿真系统人机交互界面
另外,软件还能够实时记录下摩擦叠焊装置和缆索的各个时钟节拍的位姿。据此可以再现出缆索形态的数据。设定缆索计算模型为钢架结构,长度L随下潜时间变化而变化,要求最终下潜60 m(水上10 m,水下50 m,设计半径为50 mm,材料系数采用Q235钢,底部作用集中载荷发生变化,重量从1.5 t增至2.5 t,每隔0.2 t增长计算一次,共6组数据。水上部分不受侧向力,水下部分侧向有水流压力,压力值与铅垂重量相关,变化范围为0.05 N/mm(50 N/m)变化至0.1 N/mm(100 N/m),每组数据增长步长为0.01 N/mm。其横截面半径由0.01 m增长至0.06 m,增长步长为0.01 m。
第1组:铅垂重量2.1 t,横截面半径0.04 m,水流速度0.08 N/mm,计算结果如图5所示。
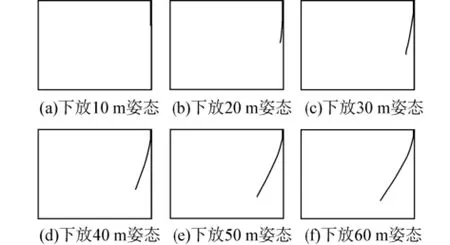
图5 第1组缆索姿态数据
第2组:铅垂重量2.3 t,横截面半径0.05 m,水流速度0.09 N/mm,计算结果如图6所示。
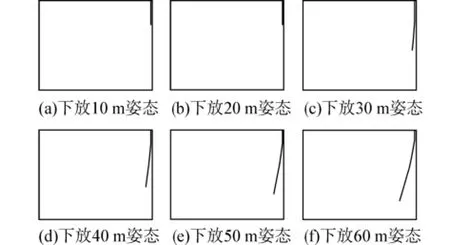
图6 第2组缆索姿态数据
第3组:铅垂重量2.5 t,横截面半径0.06 m,水流速度0.1 N/mm,计算结果如图7所示。
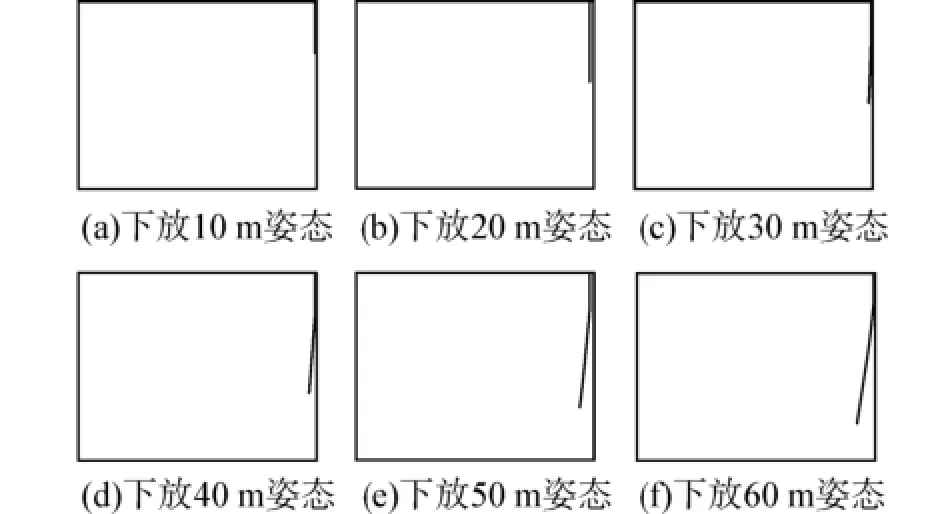
图7 第3组缆索姿态数据
通过对各工况下的实验结果的分析,铅垂质量在2.3~2.5 t和绳子半径在0.05~0.06 m时,重锤着地点偏差不会很大,能够满足焊接要求。
4 结束语
水下摩擦叠焊作业仿真系统是水下摩擦叠焊技术设备研究过程的主要组成部分。本文提出了这个专用仿真系统的开发方案和软硬件体系结构。以建立的系统动力学、运动学模型为基础,完成深水摩擦叠焊作业装置布放过程的仿真试验,对设备实际作业效果进行模拟。完成深水摩擦叠焊作业装置系统作业过程的视景仿真,对脐带缆/吊装缆、摩擦叠焊作业装置受力以及分系统之间的相互作用力进行实时计算从而完成运动状态的解算,完成整个焊接作业过程的仿真模拟。完成风、浪、流海洋环境作用下作业母船作业状态的动态仿真,完成船—缆—作业装置系统的作业过程动态显示。
[1]VEERS J,BERTRAM V.Development of the USV multi-mission surface vehicle III[C]//5th International Confer-ence on Computer Applications and Information Technology in the Maritime Industries.Beijing,China,2006:1451-1459.
[2]PARFOMAK P,FRITTELLI J.Maritime security:potential terrosist attacks and protection priorities[R].CRS Report for Congress.Washington DC,USA,2007:126-135.
[3]陈晓波,熊光楞,柴旭东.基于分布式仿真模型对象的分布式协同建模技术研究[J].系统仿真学报,2002,14(5):576-580.
[4]邓睿,赵雯,王维平.基于分布式异构仿真的协同建模框架研究[J].计算机仿真,2005,22(9):76-79.
[5]吴秀恒,刘祖源,施生达,等.船舶操纵性[M].北京:国防工业出版社,2005:121-130.
[6]贾欣乐,张显库.船舶运动智能控制与鲁棒控制[M].大连:大连海事大学出版社,2002:154-165.
[7]KENYON H S.Robo boats on the horizon:smart unmanned craftmay replacewar-fighters for both dangerous and routine operations[J].Signal Magazine,2009(9):256-261.
[8]USDepartment of the Navy.The navy unmanned surface ve-hicle(USV)master plan[EB/OL].[2013-10-11].ht-tp://www.doc88.com/p-9942007490900.html.
[9]王卓,冯晓宁.水面无人艇协同仿真平台设计方法研究[J].哈尔滨工程大学学报,2012,33(3):275-282.
[10]王卓,冯晓宁.智能水下机器人协同仿真框架研究[J].上海交通大学学报,2012,46(4):613-619.
[11]HUSTON R L,KAMMEN JW.A representation of fluid forces in finite segment cable models[J].Computers and Structures,1981,14(3/4):281-287.
[12]BARAFF D,WITKIN A.Large steps in cloth simulation[C]//SIGGRAPH98.Orlando,USA,1998:19-24.
[13]ABLOW C M,SCHECHTER S.Numerical simulation of undersea cable dynamics[J].Ocean Engineering,1983,10(6):443-457.
[14]SUN Yang,LEONARD JW.Dynamics of ocean cables with local low-tension regions[J].Ocean Engineering,1998,25(6):443-463.
[15]MILINAZZO F,M'LATCHMAN S A.An efficient algo-rithm for simulating:the dynamics for towed cale systems[J].Ocean Engineering,1987,14(6):513-526.
[16]向溢,谭家华.码头系泊缆绳张力的蒙特卡洛算法[J].上海交通大学学报,2001,35(4):548-551.
[17]靳明君,张志国.悬链线柔索索长的计算[J].铁道标准设计,2004(5):9-11.
Design of underwater friction stitch welding process simulation system
YANG Fan,LIYansheng,HUANG Jiangzhong,SONG Guoxiang,MA Li
Offshore Oil Engineering Co.,Ltd.,Tianjin 300452,China
An underwater friction stitch welding operation simulation system is designed to shorten the development cycle and save test cost in the research process of the underwater friction stitch welding technology and equipment.The simulation system also can reduce the risk of device in the sea test and practical application.This paper pres-ents the whole design scheme of the simulation system,themain content of the developmentwork,and the software and hardware architecture.The simulation softwaremeeting the functional requirements is developed.The develop-ment environment,functions of the software and human-computer interface are proposed in this paper.The feasibili-ty of the system is proved by a series of simulation experiments and the analysis of the cable force and attitude.
friction stitch welding;software architecture;cable attitude;simulation system
TP23
:A
:1009-671X(2015)01-053-04
10.3969/j.issn.1009-671X.201312017
http://www.cnki.net/kcms/detail/23.1191.U.20150112.1530.007.htm l
2013-12-31.
日期:2015-01-12.
国家自然科学基金资助项目(61100006,51209050).
杨帆(1982-),男,工程师.
杨帆,E-mail:yangfan1@mail.cooec.com.cn.
猜你喜欢
建材发展导向(2022年12期)2022-08-19
中国公路(2022年3期)2022-04-13
齐齐哈尔大学学报(自然科学版)(2021年3期)2021-04-19
当代陕西(2019年8期)2019-05-09
能源(2016年11期)2016-05-17
小朋友·聪明学堂(2016年7期)2016-05-14
中国卫生(2015年1期)2015-11-16
中国卫生(2015年8期)2015-11-12
舰船科学技术(2015年8期)2015-02-27
舰船科学技术(2015年8期)2015-02-27