
一种八轮车电气架构设计及其软硬件实现
2015-05-07 02:49周慧强熊璐
机械工程师 2015年2期
周慧强, 熊璐
(同济大学 新能源汽车工程中心,上海 201804)
0 引 言
自主导航车辆是具有先进的传感技术,不需要驾驶员可自主导航行走的车辆[1]。随着自主导航技术的发展及对自主导航车辆的需求,自主导航车辆的应用越来越广,在军用和民用方面都得到了大力的发展。在军用方面,为了降低人员伤亡,美国、以色列、英国、德国、日本和俄罗斯等国家都在积极研制各种军用无人自主车辆,已有许多车型装备使用[2-6]。本文将介绍一种无人控制八轮车的电气架构设计,使其能自适应各种复杂路况。
1 整车电气架构
该无人控制八轮车包含无人控制计算机,整车控制器,发动机ECU,变速器TCU等控制单元来实现对整车的控制。具体架构如图1所示。
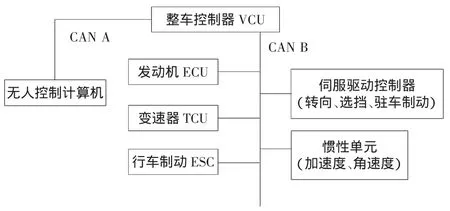
图1 整车的电气构架
其中无人控制器计算机主要用于车辆的运动学控制,通过对外部环境进行感知,规划行车路径。获得行车路径后,无人控制计算机通过CAN网络将行车信息(包括纵向加速度和转向半径等)发送给整车控制器,整车控制器根据这些信息进行相应的动力学控制,同时整车控制器还完成一些车辆的一些基本管理,如车辆的启停和电池电压检测等功能。
无人车的路径规划问题暂不在本文讨论,本文将主要探讨基于以上架构的整车管理以及动力学控制的问题。
2 整车管理
钥匙开关打到ON挡,VCU和除主控之外的其它控制器完成上电。VCU通用功能模块开始工作,VCU完成必要的初始化工作,同时实现低压电源监测、传感器信号处理、EMS熄火控制、CAN通讯、故障诊断等功能。除了完成上述基本功能,整车控制器在满足一定条件的情况下,无人控制计算机上电并开始工作,主控与VCU正常通讯,在满足一定条件的情况下,无人控制功能模块使能,实现发动机点火控制、发动机熄火控制、挡位选择控制、换挡控制、驻车制动控制、紧急制动控制、无人动力学控制和附件控制等功能。
为了清晰系统地描述本功能模块,结合车辆系统实际运行状态,将车辆工作模式划分为停机模式、驻车制动模式、怠速运转模式、行车模式、倒车模式、紧急制动模式和原地转向模式。其中,行车模式包括加减速和转向,倒车模式包括倒车加减速和转向。根据实际驾驶情况,各模式之间存在如图2所示的转换关系。

图2 模式切换关系
各工作模式之间的切换需满足一定的条件。根据实际驾驶需求,可能存在的模式切换包括:停机模式切换怠速运转模式、怠速运转模式切换驻车制动模式、驻车制动模式切换停机模式、怠速运转模式切换行车模式、行车模式切换怠速运转模式、怠速运转模式切换原地转向模式、原地转向模式切换怠速模式、怠速运转模式切换倒车模式、倒车模式切换怠速运转模式、行车模式切换紧急制动模式、紧急制动模式切换行车模式、原地转向模式切换紧急制动模式、紧急制动模式切换原地转向模式、倒车模式切换紧急制动模式、紧急制动模式切换倒车模式、紧急制动模式切换怠速运转模式、原地转向模式切换行车模式、原地转向模式切换倒车模式、行车模式切换原地转向模式、倒车模式切换原地转向模式、行车模式切换倒车模式、倒车模式切换行车模式。
3 动力学控制
无人控制八轮车能够在野外复杂的环境下基于自身的视觉、红外等传感器设备来感知环境,并根据GPS等导航、定位系统提供的地形信息,由决策系统自主地规划好路径并实现安全可靠行驶。其中,动力学控制器的主要作用就是根据上层决策系统提供的路径信息(这里主要是运动学控制器提供的车辆行驶需求的纵向车速和横摆角速度)来实现车辆的稳定行驶。整体控制构架如图3所示。
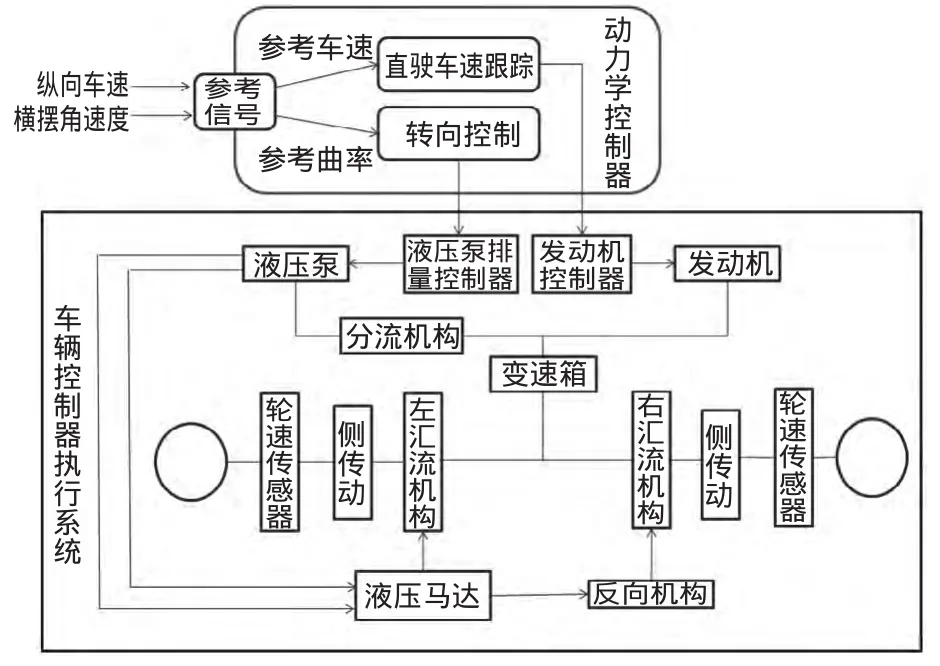
图3 整车动力系统结构
由于该无人控制八轮车是一款差动转向轮式车辆,且拥有独立的转向机构——机械液压差动转向装置,通过该装置发动机将动力传送给车轮来实现转向;而车辆的直驶是发动机直接将动力通过传动系统传送给车轮。考虑到这种特点,从整车的角度控制车辆的难度较大,对车辆的控制被下放到对车轮的轮速进行控制。但是又由于机械液压差动转向装置将车辆的左右侧车轮相耦合,使得两侧车轮又不能独立控制,车轮控制系统将是一个双执行器系统。因此,为了避免这两种系统的响应带宽相差太大,影响动力学控制器的稳定性,这里开发的动力学控制器将对车辆进行解耦,分别对转向和直驶进行设计。
4 建模与仿真
根据上述整车管理构架和动力学控制构架,搭建了整车管理simulink/stateflow模型和动力学控制算法simulink模型,如图4、图5所示。
为了验证整车管理策略以及车辆运动学算法,同时也建立了整车模型,如图6所示。
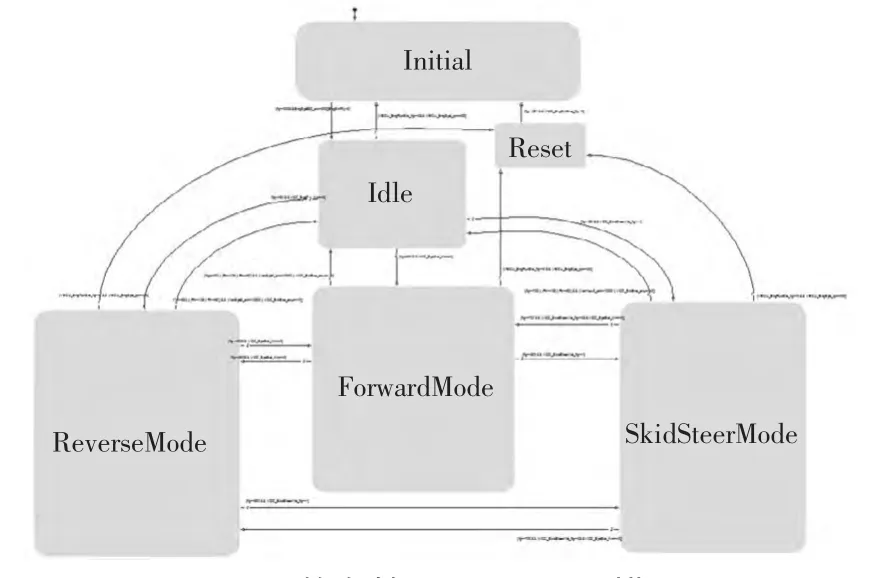
图4 整车管理stateflow模型

图5 整车运动学算法模型
图6 整车模型
仿真实验:这里主要验证所设计的动力学控制算法能够跟踪上主控要求的车辆行驶需求的纵向车速和横摆角速度。从仿真图中可以看出车辆控制算法能够很好地跟踪无人控制计算机给定的目标车速和目标横摆角速度。从而在软件仿真环节验证了整车动力学控制算法的正确性。
5 硬件在环测试
在整车控制的开发流程中我们采用了自动代码生成技术,将通过仿真验证的控制策略模型与算法模型自动生成控制器可以直接烧录的代码。由于仿真并不能验证算法生成代码后运行的状况,而且对于整个系统的CAN通信也无法经过仿真验证,所以我们需要将算法生成代码,烧录到控制器中进行硬件在环试验,来验证在近似真实的情况下算法和通信的运行状况。对于硬件在环测试,我们的基本思路是通过两个控制器(分别为车辆模型控制器和整车控制模型控制器)进行试验,其中车辆模型控制器烧录整车模型,整车控制模型控制器烧录整车控制器策略,其中车辆模型控制器是用于模拟整车的运行控制器,整车控制模型控制器中烧录的是真实的需要用于整车控制VCU的程序。两个控制器之间通过CAN通信来交换数据。试验台如图8所示。
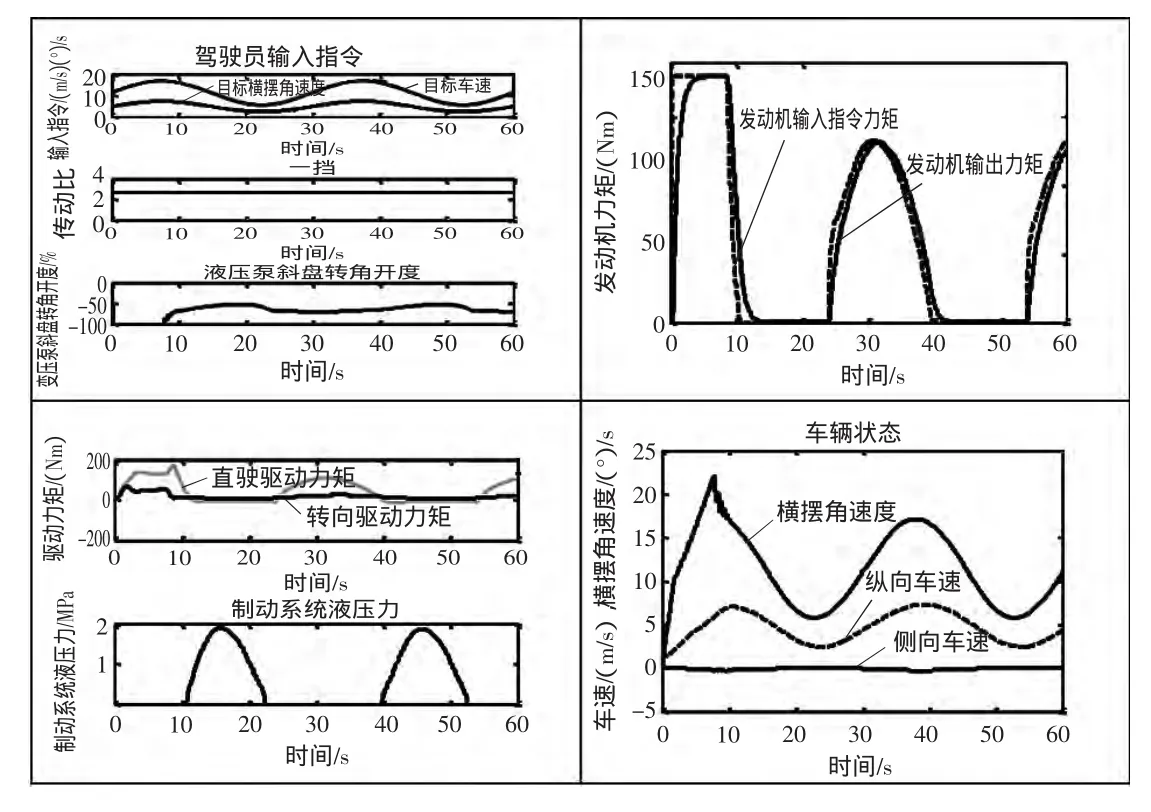
图7 控制算法仿真
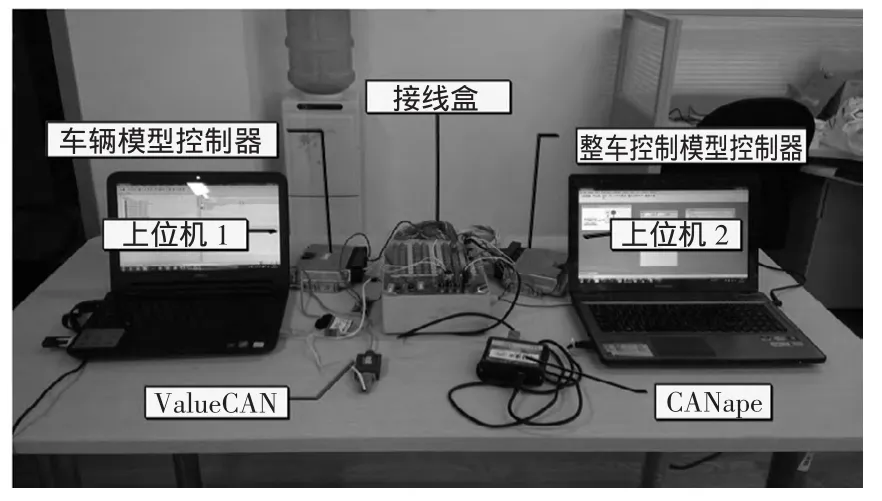
图8 硬件在环测试台
其中上位机1通过INCA对车辆模型控制器进行标定观测,上位机2通过CANape对整车控制模型控制器进行标定观测。
对整车管理策略调试:当整车控制器上电后进入无人模式,随后控制器进入初始化,初始化正常后发动机启动继电器闭合,发动机启动,如果发动机转速在800 r/min以上持续10 s,则说明发动机启动成功,发动机进入怠速模式。启动继电器吸合时间不超过30 s,图9是硬件在环测试台上上位机2观测的数据,在各种模式之间设立了不同的标志位(flg),从图9中可以看出最后标志位为301,即代表程序进入了怠速模式。从中可以看到发动机启动逻辑控制策略在整车控制器中代码运行正确。
图10表征的是整车动力学控制的测试,无人控制计算机给整车控制器下达纵向速度指令,在第10 s速度从10 km/h上升到20 km/h,随后上升到40 km/h,最后降到20 km/h,从CANape观测得到的从整车模型控制器传来的车速信息反馈也能很好地跟随无人控制器给定的速度,同时也可以看到发动机扭矩需求的变化,与仿真的结果相似。
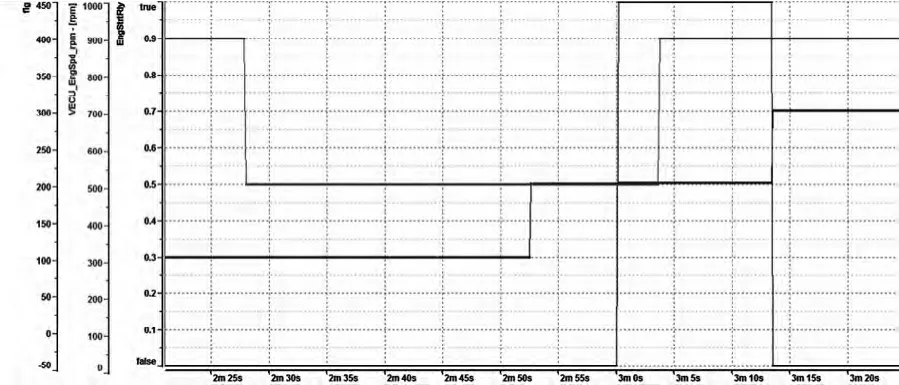
图9 硬件在环测试台上上位机2观测的数据截图
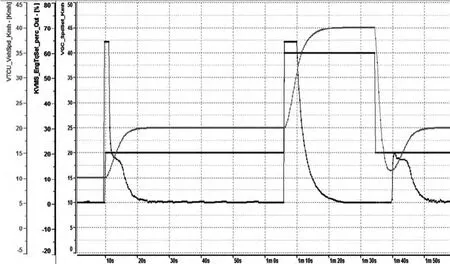
图10 整车动力学控制的测试界面
6 结语
本文较为详细地介绍了一种无人控制八轮车的架构设计及其控制策略与控制算法的开发,并对其控制策略与控制算法进行了Simulink仿真,最后通过硬件在环试验测试了控制策略与控制算法在代码级别上的正确性。通过这个流程明显缩短了控制算法的开发周期,在工程实践中具有明显优势。
[1] 胡晖.六轮独立驱动无人车下位机控制系统研究[D].上海:上海交通大学,2013.
[2] 张韬懿,王田苗,吴耀,等.全地形无人车的设计与实现[J].机器人,2013,35(6):657-664.
[3] 鲁京立,卜春光,高英丽.野外地面移动机器人系统设计与实现[J].仪器仪表学报,2009,30(10):293-297.
[4] 江水明.六轮自主移动机器人动力学建模与控制的研究[D].南京:南京理工大学,2005.
[5] 杨春.基于变形车轮的移动机构研究[D].北京:北京交通大学,2010.
[6] 田海波.一种微型智能车的结构设计与性能分析[D].西安:西北工业大学,2006.
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
制造技术与机床(2017年6期)2018-01-19
汽车与安全(2016年5期)2016-12-01
电源技术(2015年9期)2015-06-05
汽车维修与保养(2015年12期)2015-04-18
现代企业(2015年4期)2015-02-28
噪声与振动控制(2015年4期)2015-01-01
中国交通信息化(2014年4期)2014-06-05
客车技术与研究(2014年1期)2014-03-20
汽车电器(2014年8期)2014-02-28
