基于闭环超前校正的硬盘磁头位置控制器设计
2015-04-29 16:38余亮李超
科技尚品 2015年11期
关键词:闭环控制
余亮 李超

摘 要:计算机硬盘是计算机系统中重要的硬件组成部分。而硬盘读写磁头的位置控制对于数据读写的速度与精度至关重要。因此,本文提出了一种闭环超前校正的计算机磁盘读写磁头位置控制器,通过对其进行仿真分析可知,系统不仅具有较高的定位速度与精度,而且还提高了系统的稳定性。
关键词:闭环控制;超前校正;读写磁头;位置控制器
0 引言
计算机系统的硬件组成部分主要包括中央处理器、存储器和输入输出设备组成。而其中的存储器主要由内存和外存组成。内存一般由读写速度快的半导体存储器构成,CPU能对其直接访问;外存是辅存的最主要的表现形式,外存一般由读写速度慢的磁表面存储器构成,因而也简称为磁盘。磁盘的存储原理是由于磁性材料的磁滞曲线效应,使得磁盘具有两个稳定的剩磁状态,正好能存储计算机中的二进制代码1和0。而磁盘的读写原理是利用一种称为“磁头”的装置沿磁盘的径向运动来形成和判别磁层中的不同磁化状态,从而来写入或读出相应的二进制数据。而这其中读写磁头位置控制的好坏会直接影响从磁盘中读出的数据的准确性,因此,本文设计了一种基于闭环超前校正的磁盘磁头位置控制器,通过仿真分析,可以验证该种控制器不仅能确保系统稳定,使得系统稳定裕度有所增加,而且有较高的位置定位精度,使得读写数据更加准确。
1 磁盘读写磁头的数学模型
磁盘的结构如图1所示,其中根据牛顿定律,忽略一些次要因素和条件,我们可以方便的得到读写磁头的微分方程:
式中,θ(t)为磁头角位移;i(t)为输入电流;J为装置的转动惯量;C为粘滞阻尼系数;K为弹性系数;Ki为单组力矩常数。
对式(1)进行拉普拉斯变换,可以得到系统的传递函数为:
(2)
2 闭环超前校正控制系统设计与仿真分析
通过对磁头位置控制器传递函数分析,设计了闭环超前校正控制系统如图2所示。
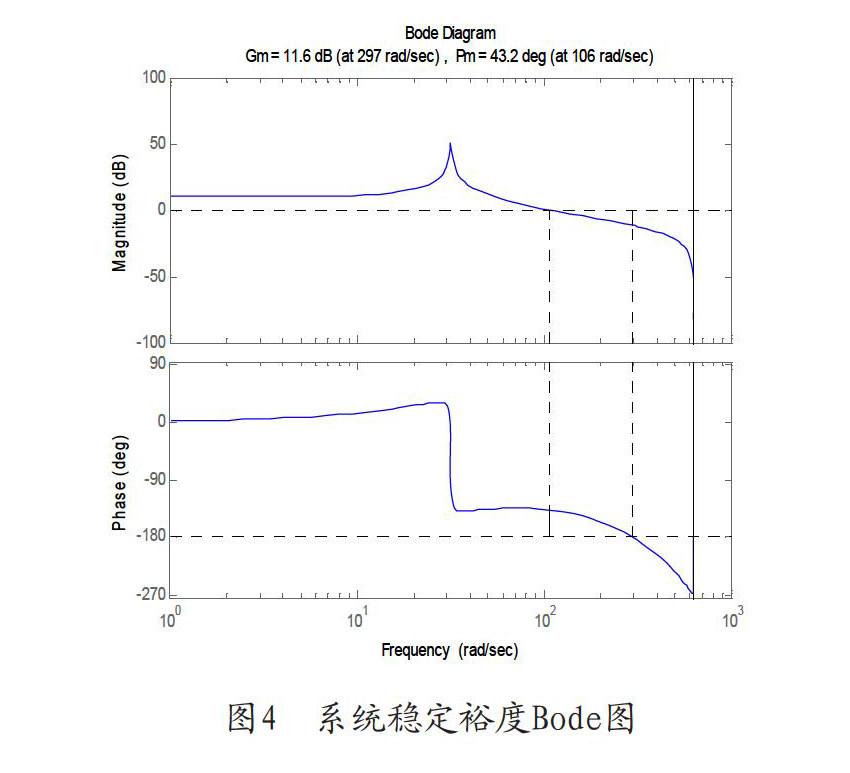
设J=0.01kg·m2,C=0.004N·m,K=10N·m/rad,Ki=0.05N·m/rad,Kf=4110,通过对闭环超前校正控制系统运行,可以得到该系统的单位阶跃响应曲线如图3所示,可以明显看出系统很稳定,其调节时间小于0.06s,即闭环超前校正磁盘驱动器系统的寻道时间小于0.07s。从目前磁盘的产品标准而言,对于一个非常小的阻尼系统开始来说,其性能能较好的达到市场需要。同时还对系统的稳定裕度进行了分析,得到了图4所示,可以看出该种方法不仅能提高系统的定位速度和精度,还能进一步提高系统的稳定性。
参考文献
[1]张德丰.MATLAB自动控制系统设计[M].北京:机械工业出版社,2010:367-374.
[2]白中英,戴志涛.计算机组成原理[M].北京:科学出版社,2013:211-218.
[3]陈明.硬盘磁头飞高与二级定位合成致动技术研究[D].华中科技大学,2012.
[4]张洪波.硬盘驱动器两级磁头定位研究[D].华中科技大学,2008.
[5]陈云.一种抑制径向误差的控制器算法研究[D].华中科技大学,2009.
猜你喜欢
山西电子技术(2023年6期)2024-01-02
北京航空航天大学学报(2022年5期)2022-06-06
测控技术(2018年1期)2018-11-25
电子制作(2018年11期)2018-08-04
电源技术(2017年1期)2017-03-20
电测与仪表(2016年9期)2016-04-12
电测与仪表(2016年16期)2016-04-12
科技视界(2015年27期)2015-10-08
电源技术(2015年11期)2015-08-22
电测与仪表(2015年3期)2015-04-09