
基于流量校准系统中供水系统的仿真研究
2015-04-20 20:18:46王晓娟
科技创新与应用 2015年11期
王晓娟
摘 要:该课题研究的是变频恒压供水系统在流量校准系统中的应用,采用变频循环模式构建了本装置的变频调速系统,对变频控制各部分的组成进行了数学建模与仿真。用涡轮流量计对供水系统管道中的流量进行检测,变频供水系统采用闭环PI控制。在整个检定流量范围内实现了流量调节过程的变频控制。为保持流速平稳,采用泵进行抽水,较好地保证了供水管道内流量的平稳。
关键词:供水系统;流量调节;变频控制
随着社会经济的迅速发展,人们对供水质量和供水系统的可靠性要求不断提高。衡量供水质量的重要标准之一是供水压力是否恒定,因为水压恒定于某些工业或特殊用户是非常重要的。变频调速技术以其显著的节能效果和稳定可靠的控制方式,在风机、水泵、空气压缩机、制冷压缩机等高能耗設备上广泛应用。利用变频技术与自动控制技术相结合,在中小型供水企业实现恒压供水,不仅能达到比较明显的节能效果,提高供水企业的效率,更能有效保证从水系统的安全可靠运行.变频恒水压供水系统集变频技术、电气传动技术、现代控制技术于一体。采用该系统进行供水可以提高供水系统的稳定性和可靠性,方便地实现供水系统的集中管理与监控;同时可达到良好的节能性,提高供水效率。所以研究设计基于变频调速的恒定水压供水系统(简称变频恒压供水),对于提高企业效率以及人民的生活水平,同时降低能耗等方面具有重要的现实意义。
1 基于流量校准系统中恒压供水系统的分析
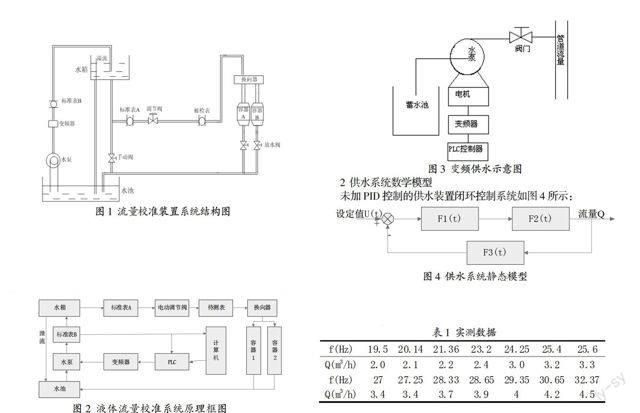
液体流量校准系统主要由供水系统、流量控制装置和流量检定装置组成。供水系统由水箱、水槽和泵组成。流量控制装置由标准表B、变频器、泵和电动调节阀组成。流量检定装置由标准表A、被校表和标准容器组成。本次试验在管道20mm的条件下进行的。流量标定装置系统结构图如图1所示。
图1 流量校准装置系统结构图
流量控制系统主要用来完成管道内流量的控制。包括供水系统管道流量控制和校准系统管道流量控制。供水系统采用变频器实现水泵电机的变频调速,涡轮流量计检测当前管道内的流量,流量信号经变送器输出标准电信号(4-20mA)通过A/D转换模块送入PLC,经PLC进行流量反馈值与设定值的PID运算,运算结果送入变频器频率控制端控制变频器的输出频率,从而改变电机转速,达到控制流量的目的。流量反馈值同时经PLC送入计算机,经组态软件进行显示。由PLC接收控制信号,并实现对电机的起停及切换控制。水泵在变频器的控制下通过开关阀送入到校准管道内,经电动调节阀调节流量流回水池。同时,变频器的报警信号也全部送入PLC,以便利用PLC与计算机进行通讯并实现监控。液体流量校准系统的工作原理图如图2所示。
供水系统执行器采用变频器。为保证水流的稳定,本装置采用日本三菱(FR-S520S-0.4K-CH(R))变频器,通过根据输入信号的设定改变变频器的频率,根据变频器和转速的关系从而可以控制管道中的流量。采用该系统进行供水可以提高供水系统的稳定性和可靠性,方便地实现供水系统的集中管理与监控;同时可达到良好的节能性,提高供水效率。变频器控制信号输入为 4~20mADC或 0~5VDC,~220V 变频输出用来驱动三相磁力驱动泵。变频供水示意图如图3所示。
图3 变频供水示意图
2 供水系统数学模型
未加PID控制的供水装置闭环控制系统如图4所示:
图4 供水系统静态模型
图中,F1(t)代表变频器模型,F2(t)代表电动机至水泵的静态模型,F3(t)代表压力传感器的静态模型。变频器输入输出是线性关系,控制信号是0~5v的电压,对应0~50Hz的频率f。因此变频器F1(t)数学模型是:
f(t)=10e(t) (1)
f(t)是变频器的输出信号,e(t)是变频器的输入信号,在这里是误差信号。
电动机至水泵出口的静态模型:通过实验测得的数据,变频器频率f对应出口流量Q,测得的数据如表1所示:
表1 实测数据
对以上数据利用MATLAB进行多项式拟合,程序为:
%给定数据对
x0=[19.5,20.14,21.36,21.77,24.25,25.4,25.6,27.16,27.25,28.33,28.6
5,29.35,30.65,32.37];
y0=[2.0,2.1,2.2,2.4,3.0,3.2,3.3,3.4,3.4,3.7,3.9,4.0,4.2,4.5];
%求拟合多项式
n=1;
p=polyfit(x0,y0,n)
%图形的拟合情况
xx=18:1:35;
yy=polyval(p,xx);
plot(xx,yy,'-b',x0,y0,'.r','markersize',20)
legend('拟合曲线','原始数据','Lcation','SouthEast')
xlabel('f');
ylabel('Q')
经过仿真可得到拟合多项式,如图5所示,可得到式(2):
Q=0.2008f-1.9534 (2)
拟合曲线如图6:
图5 拟合多项式
图6 拟合曲线
图6中是原始数据和拟合直线,可以看出,拟合曲线很接近直线。
流量传感器输入信号为1~5v电压U,对应输出为1~5v电压信号,因此数学模型F3(t)为:
H(t)=Q(t) (3)
由式(1)(2)(3)知整个系统的静态模型为:
Q(t)=0.6676U(t)+0.6494 (4)
被控对象(包括变频器、电机、水泵以及流量传感器)的传递函数具有如下形式:
G0(s)=■ (5)
由系统的静态模型知,在单位阶跃输入信号作用下,系统的稳态输出为:
Q(t)=0.6676*1+0.6494=1.317 (6)
则单位阶跃输入信号的稳态误差为:
|ess|=1.317-1=0.317 (7)
即:
(8)
可知:K=2.15 (9)
系统的单位阶跃响应的频域描述为:
(10)
对(10)式进行拉氏反变换,系统的单位阶跃响应在时域描述为:
(11)
通过观察系统的动态起动过程,大约能在4秒钟的时间能够达到稳态值(稳态值2%误差),则有:
(12)
经过化简:
(13)
可求得:
(14)
将式(14)、(9)带入式(5)中得到:
(15)
闭环系统传递函数为:
(16)
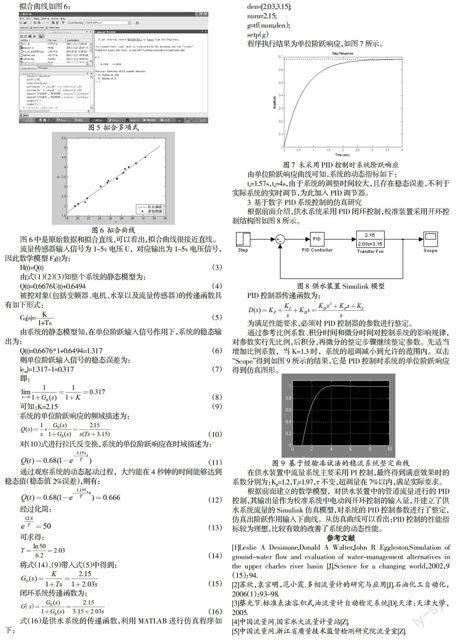
式(16)是供水系统的传递函数,利用MATLAB进行仿真程序如下:
den=[2.03,3.15];
num=2.15;
g=tf(num,den);
setp(g)
程序执行结果为单位阶跃响应,如图7所示。
图7 未采用PID控制时系统阶跃响应
由单位阶跃响应曲线可知,系统的动态指标如下:
tr=1.57s,ts=4s,由于系统的调整时间较大,且存在稳态误差,不利于实际系统的实时调节,为此加入PID调节器。
3 基于数字PID系统控制的仿真研究
根据前面介绍,供水系统采用PID闭环控制,校准装置采用开环控制结构图如图8所示。
图8 供水装置Simulink模型
PID控制器传递函数为:
为满足性能要求,必须对PID控制器的参数进行整定。
通过参考比例系数、积分时间和微分时间对控制系统的影响规律,对参数实行先比例,后积分,再微分的整定步骤继续整定参数。先适当增加比例系数,当K=1.3時,系统的超调减小到允许的范围内。双击“Scope”得到如图9所示的结果,它是PID控制时系统的单位阶跃响应得到仿真图形。
图9 基于经验凑试法的稳流系统整定曲线
在供水装置中流量系统主要采用PI控制,最终得到满意效果时的系数分别为:Kp=1.2,Ti=1.97,?子不变,超调量在7%以内,满足实际要求。
根据前面建立的数学模型,对供水装置中的管道流量进行的PID控制,其输出量作为校准系统中电动阀开环控制的输入量,并建立了供水系统流量的Simulink仿真模型,对系统的PID控制参数进行了整定,仿真出阶跃作用输入下曲线。从仿真曲线可以看出:PID控制的性能指标较为理想,比较有效的改善了系统的动态性能。
参考文献
[1]Leslie A Desimone,Donald A Walter,John R Eggleston.Simulation of ground-water flow and evaluation of water-management alternatives in the upper charles river basin[J].Science for a changing world,2002,9(15):94.
[2]苏欣,袁宗明,范小霞.多相流量计的研究与应用[J].石油化工自动化,2006(1):93-98.
[3]蔡光节.标准表法容积式油流量计自动检定系统[D].天津:天津大学,2005.
[4]中国流量网.国家水大流量计量站[Z].
[5]中国流量网.浙江省质量技术监督检测研究院流量室[Z].
