部分气动执行机构及其应用
2015-04-19 07:46姚晓先黄一鸣
导航定位与授时 2015年2期
姚晓先,黄一鸣
(北京理工大学宇航学院,北京100081)
部分气动执行机构及其应用
姚晓先,黄一鸣
(北京理工大学宇航学院,北京100081)
介绍了气动舵机和射流执行机构的分类和工作原理,分析了不同气动舵机和射流执行机构的特点和应用情况,根据射流执行机构的工作特性,认为其将在防空反导导弹中得到广泛应用。
气动舵机;射流执行机构;制导武器;气压控制
0 引言
气压控制技术由于成本低、适应温度范围广,在制导武器中得到广泛应用,如导弹的压缩空气弹射装置、燃气蒸气弹射装置、气动舵机、射流执行机构、翼张机构、抛撒机构、锁紧与解锁装置、助力保压系统及检测系统等。本文主要介绍弹上气动执行机构,即气动舵机和射流执行机构。
舵机是控制导弹或火箭飞行姿态的执行机构,一般来讲就是能够根据制导系统发出的指令,驱动舵片角度变化,产生姿态控制力矩,实现导弹或火箭飞行姿态控制的装置;射流执行机构也是一种控制导弹或火箭飞行姿态的执行机构,但其不是靠改变舵片角度控制弹体姿态的,而是靠射流改变主发动机喷射的流体方向实现对弹体姿态的控制。
1 气动舵机
当气动舵机按工作原理进行分类时,一般可分为线性舵机(或闭环舵机)和非线性舵机或脉宽调制舵机(或开环舵机)。线性舵机系统一般是典型的位置或角度伺服系统,输出与输入控制信号成线性关系。脉宽调制舵机系统的工作原理是将连续的控制信号经脉宽调制器转换成脉冲信号,脉冲的宽度与输入量成比例,脉冲的频率和幅值不变,由于脉冲宽度不同,舵片或气流在相应位置的时间不同,其在给定的周期内产生的平均作用力或力矩不同,从而实现导弹的姿态控制。实际上在脉宽调制舵机控制过程中导弹弹体起了解调作用,所以舵机的脉宽调制的频率(也称载波频率)必须大于弹体固有频率的5倍以上,这时脉宽调制舵机才能取得预期的控制效果。
脉宽调制舵机是最早应用于导弹姿态控制的执行机构之一。其特点是脉宽调制(PWM)舵机的各部件一般都工作在开关状态,与线性舵机相比该种舵机的加工工艺性好,成本较低,目前在国内外导弹上还有广泛的应用。如美国的TOW式反坦克导弹,我国的HJ-73反坦克导弹和俄罗斯的萨姆-6地空导弹等。在旋转弹中,早期大部分舵机或执行机构都采用这种脉宽调制舵机。
图1是美国TOW式导弹舵机和气源系统的工作原理图。它由气瓶、电爆阀、减压阀、电磁阀、差动缸和放大器等组成。其中,气瓶、电爆阀和减压阀合称为气源系统;电磁阀与差动缸一般俗称舵机,在舵机系统中共有4套,每1套独立控制一个舵片,图1中只画出了一个阀缸部分。其工作过程为舵机系统开始工作前,导弹控制系统发出开启气源指令,该指令点燃电爆阀,气瓶内高压气体经减压阀减压后进入差动缸有杆腔,同时进入电磁阀入口,差动缸无杆腔内的气压由电磁阀的状态控制。当控制系统控制器输出电压V0为低电平时,电磁阀的开口位置如图1所示,差动缸无杆腔接大气,由于差动缸有杆腔接高压气,活塞缩回;当控制器输出电压V0为高电平时,差动缸无杆腔接高压气,由于差动缸无杆腔活塞面积大于有杆腔活塞面积,活塞伸出;实现了按照控制系统的指令控制舵片上下摆动。
图1中下部分的信号波形反映了舵机系统的工作原理。放大器将接到的控制信号Vi调制成脉宽信号驱动电磁阀开或关,差动缸带动舵片根据电磁阀的开关状态上或下摆动,其控制效果可用下式表示

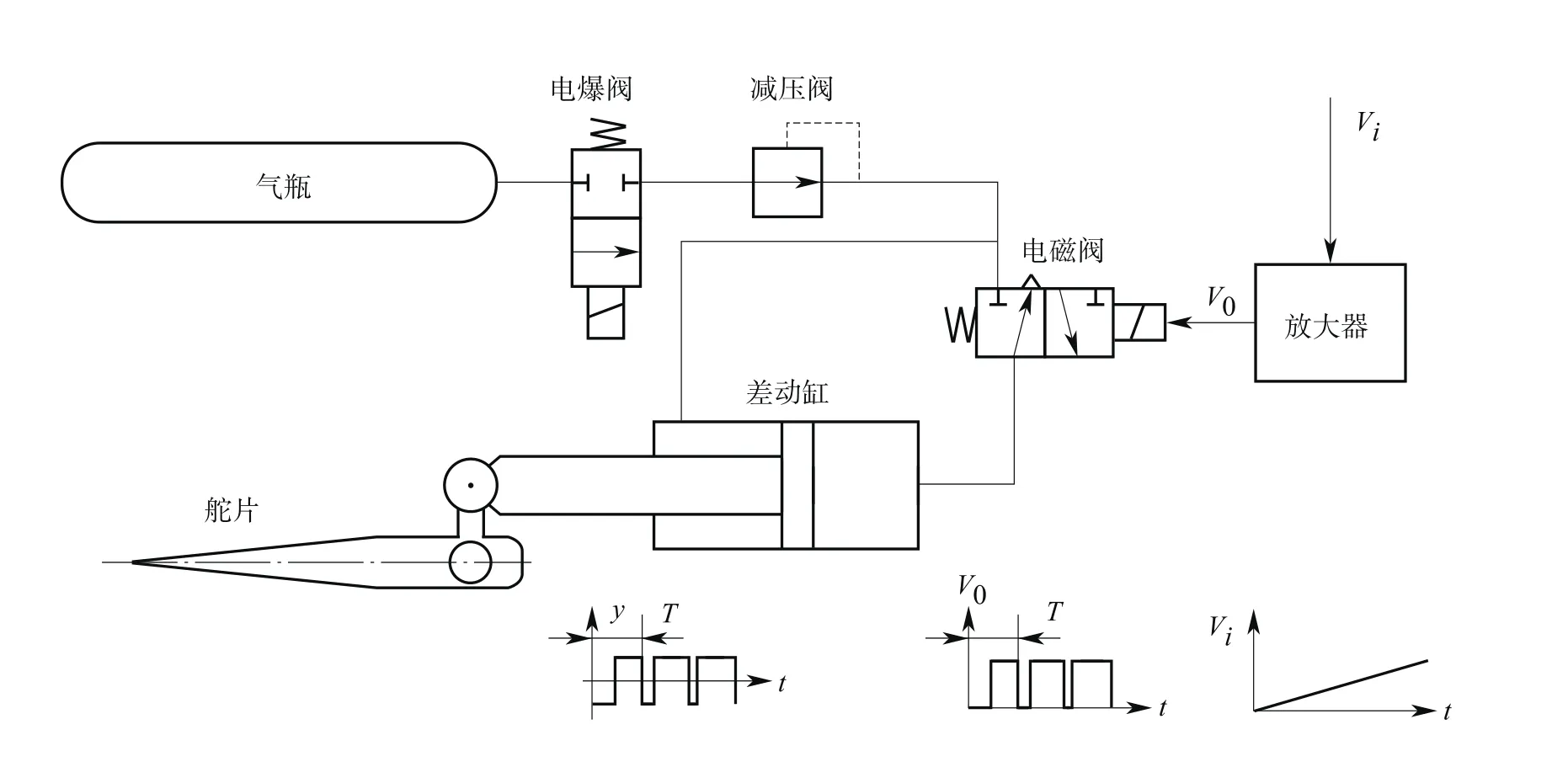
图1 TOW式舵机工作原理图Fig.1 The scheme of TOW pneumatic actuator
该种舵机系统优点是结构简单、成本低,缺点是由于舵片经常处在最大或最小位置,使弹体飞行时受到干扰,要损耗导弹一定的飞行力,同时,耗气量也较大,一般应用于铰链力矩较小的旋转弹上。
为克服脉宽调制舵机的缺点,利用长处,20世纪80年代美国在其动能弹上使用了脉宽调制线性化舵机。该种舵机的工作原理如图2所示。与图1脉宽调制系统比较,线性化系统只增加了反馈电位计,但其输入与输出成为线性关系。这种舵机实际是可以归入线性舵机的范畴,但其工艺性好,成本低,目前受到广泛的重视。我国一些导弹也使用了该种舵机。
图2舵机系统的改进型是用两个电磁阀分别控制进入和排出气缸无杆腔的气体,该结构虽然增加了一个电磁阀,但耗气量大大减少,理论上活塞不动时,系统不耗气。该种气动舵机系统可以应用于要求工作时间较长的导弹上。

图2 PWM线性化舵机工作原理图Fig.2 The scheme of linearized PWM pneumatic actuator
气动舵机按工作气体性质分为冷气舵机和燃气舵机。燃气舵机是指工作介质为高温燃气,该燃气主要来源于燃气发生器或为主发动机燃气的一部分。图3是一个线性燃气舵机的工作原理图。它主要由燃气发生器、安全阀、过滤器、力矩马达、射流管阀、气缸和反馈电位计等组成。燃气发生器的作用是产生高压燃气,为舵机提供能源,燃气发生器的能源是是固体推进剂,其燃烧速度与燃气的温度和燃烧室内的压力有关,一般温度和压力越高固体推进剂燃速越快,因此在不同温度时燃气发生器的输出压力不同;安全阀的作用是在燃烧室内压力高于给定值时泄掉一些气体,确保系统不被损坏。
力矩马达衔铁与射流管固定在一起。当来自控制系统的控制电压输入Vi=0,且反馈信号Vf=0时,驱动放大器输出电流V0为零,力矩马达衔铁(或射流管)处在零位,射流管与两接收口形成的两个进气过流面积相等,排气过流面积也相等,经射流管进入的高压气通过进气节流面积射入气缸I腔和II腔的气体流量相等,经过排气节流面积流出的流量相等,两腔压力P1=P2,活塞不动;当Vi>0,使V0>0,力矩马达控制线圈有控制电流流过,衔铁带动射流管旋转至与输入电压Vi相应的角度,这时气体进入气缸I腔气体流量增加,I腔压力P1增加,相反,进入气缸II腔气体流量减少,压力P2减小。压力差△P=P1-P2对活塞产生的作用力使活塞向右运动,反馈电压Vf增加,Vf的增加使放大器输出V0减少,射流管转角减少,最终活塞稳定在与输入控制信号Vi相对应的位置,从而实现控制输入信号Vi与舵偏角输出或活塞位移y的线性比例控制。
当图3中的燃气能源改为冷气能源,即将燃气发生器、过滤器和安全阀换成高压气瓶、减压阀(或带安全阀的减压阀)和电爆阀,该系统就是所谓的冷气舵机,但二者的力矩马达和射流管阀等部件的配合公差不同,主要是由于燃气工作时接触燃气的零件变形大,而不接触的小。不过燃气舵机在冷气时一样工作,燃气舵机一般都是用压缩空气进行交付检验的。
燃气舵机系统中燃气发生器一般使用端面燃烧的固体推进剂,其燃速几乎是恒定的,所以燃气舵机使用的控制阀基本是恒流量阀,即在工作过程系统瞬时耗气量近似一常数,如射流管阀和喷嘴挡板阀等。同时,燃气舵机控制阀的抗污染能力要强。目前,已有了负压力指数的固体推进剂,即压力升高,燃速降低,若应用于舵机,系统的组成要有所改变。
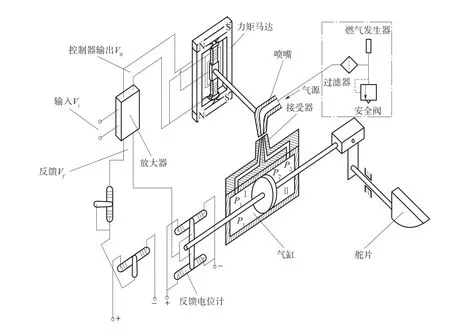
图3 燃气舵机工作原理图Fig.3 The scheme of gas actuator
冷气舵机一般要求控制阀耗气量要少,这样同样容积的气瓶才能工作较长时间。不论是燃气舵机还是冷气舵机,一般它们的工作时间都限制在1min以内。燃气舵机是由于燃气气体温度一般都在800℃以上,控制阀的温度随着工作时间增加而升高,其升高的上限受一些部件的限制,如线圈等。冷气舵机的工作时间取决于高压气瓶容积的大小,该容积受弹体空间布局的约束。在一定气瓶容积下,为增加舵机工作时间只能提高气瓶充气压力,目前气瓶充气工作压力高达50MPa以上。
气体由于存在可压缩性,因而气动舵机承载能力不强,一般都应用于输出扭矩在100Nm或50Nm以下的场合。气动舵机的优点是结构简单、成本较低,在小输出功率的场合具有较强的竞争优势,尤其是弹体结构空间受到限制的导弹。不过俄罗斯有输出力达10000N的气动舵机。
图3中的燃气舵机和冷气舵机目前国内都有相关产品。输出力达2000N,也研制过输出力为8000N的产品,它们频响能够达到20Hz以上。
气动舵机除以上介绍的舵机外,还有一种充压式舵机。充压式气动舵机的气源即不是燃气也不是气瓶里的压缩气,而是利用导弹或火箭飞行中高速空气流转换成压力能来作为舵机的能源。具体工作原理如图4所示,当高速气流进入弹体经过滤器后滞止为压力P的气体,该气体作为舵机的能源驱动差动缸工作,完成系统的控制功能。这种充压舵机的特点是结构简单,工作时间不受限制,弹体飞行速度越快,滞止压力越高,但要损失一定的飞行动力,使导弹射程减少。在弹体飞行速度处于亚临界或临界状态,滞止压力小于0.1MPa,因此该种舵机一般应用于驱动力矩不大的场合,为提高舵机系统的频宽,使系统处于低阻尼状态,如前苏联一种应用与旋转弹的冲压线性舵机,其舵机最大输出角为15°,但其自由振荡频率和幅值是50Hz左右和8°。敢于应用这种性能的舵机到弹上,需要总体设计师的水平和胆量。目前我国也有类似的冲压式舵机在应用。

图4 充压舵机工作原理图Fig.4 The scheme of the pneumatic actuator of charging pressure
从以上关于气动舵机的特点可知气动舵机种类较多,比较适合不同弹体的结构布局,其输出功率较小,多应用在小型导弹或火箭上,如反坦克导弹、空-空导弹及地-空导弹等。
2 射流执行机构
射流执行机构基本是按脉宽调制方式工作的,射流执行机构也和气动舵机相似,品种多种多样。据已经掌握的资料,目前主要有以下几种类型的执行机构。
2.1 射流元件为最后输出的执行机构
所谓射流元件就是用小气流控制大气流的流体功率放大元件。图5是射流元件为最后输出的射流执行机构工作原理图。来自燃气发生器的主气流从入口S处射入后,如a处有控制流,b处无控制流,也就是电磁阀A打开,电磁阀B关闭。那么,在流过A阀控制气流的作用下,主气流从C口喷出,该气流产生一个向右的力f1;当电磁阀B打开,电磁阀A关闭,主气流从D口喷出,产生一个向左的力f2。当电磁阀A和B在同一载波周期内处于开启状态时间相同,其产生的平均作用力为零,对弹体不产生控制效果,否则有控制作用。该阀也称为超音速射流双稳阀,是因为当控制气流消失后,若没有其它控制气流出现,主气流由于附壁效应,不会改变射流方向。也由于该原因,其流道有一定长度要求。

图5 射流元件为最后输出的执行机构Fig.5 The actuator of The final output in a fluidic amplifier
对于该射流执行机构的主要技术指标是气流产生的控制力f1和f2的大小及从给控制阀信号到气流换向的时间间隔,也称切换时间。图6给出了控制电磁阀的开关信号与射流力的时间关系。其中,第一条曲线是控制信号,高电平为A阀开启指令,低电平为B阀开启指令;第二条曲线是气流产生的控制力;t1和t3是延时时间,t2和t4是气流换向时间;t1+t2与t3+t4就是切换时间。另外,t1与t3、t2与t4的一致性也是脉宽调制舵机的主要技术指标。除此之外,脉宽调制的载波频率也是该类型系统的重要指标。

图6 控制信号与射流力的关系Fig.6 The relationship between control signal and fluidic force
俄罗斯的旋风火箭弹就是采用图5所示射流执行机构进行初始段修正。其换向时间在8ms左右。其特点是结构简单,但结构尺寸较大,同时气流切换不完全,即当主气流从C口射出时,D口也有一定的流体流出,控制效果降低。我国也有类似的产品应用。
当图5射流执行机构中控制阀A和B入口不接高压气源Ps,而直接接大气,形成负压切换射流元件。该种射流元件工作状态是当A阀通电B阀不通电,主气流从D口流出(同接高压气源流动状态相反)。该种射流元件称为负压切换元件,工作状态受外界环境气压影响较大。我国和俄罗斯都有相关产品应用。
2.2 射流元件为中间级功率放大执行机构
图7是射流元件为中间级功率放大执行机构原理图。它主要由机电转换元件、射流元件和开关阀组成。其工作原理是高压气从射流元件的高压进气口输入,气体一部分进入控制腔,主气流进入射流区,当电机转换元件的线圈1通高压电,线圈2无电流时,衔铁顺时针转动至将喷嘴2封住,进入控制腔的气流经喷嘴1至控制口1,在该气流作用下,从高压进气口进入射流区的主气流向下偏转,从喷口2输出,同时开关阀的阀芯在气流作用下,将喷口1堵死。当线圈2通电,线圈1无电流,主气流从喷口1输出。当线圈1和2分别加高电平和低电平或低电平和高电平,就实现了气流方向的控制。该射流元件的特点是无控制气流泄流,效率高。
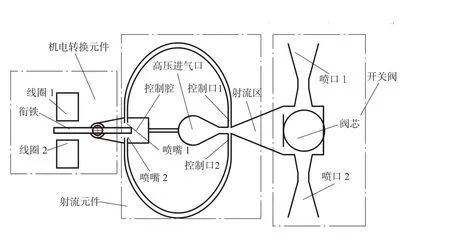
图7 射流元件为中间级功率放大执行机构Fig.7 The actuator in the middle of fluidic amplifier
为实现大流量控制,射流元件部分需要多级放大,射流元件每级流量放大倍数一般在10倍左右。美国标3的射流执行机构采用了相似的工作原理。其换向时间在5ms以内。
2.3 换向阀式射流执行机构
换向阀式射流执行机构比较简单,其主要部分就是如图7中的开关阀,其阀芯的换向由气动或电动执行机构直接驱动,由于开关阀结构的不同和换向执行机构的不同,该种类射流执行机构多种多样,其特点是工作原理简单、结构紧凑,容易设计,可应用在体积受限要求控制流量大的场合,但运动部件较多,工作时间可能受到限制。
射流执行机构控制效果不受环境影响、响应快,在导弹控制执行机构中越来越受到重视,应用不断增加,尤其在防空反导导弹的控制上。
3 结论
在弹上应用的气动执行机构很多,以上主要论述了主要的几种,也是我们进行过研制的内容。在其中最具发展潜力的是射流执行机构,如美国标3导弹用多组射流执行机构完成弹体的俯仰、偏航和变轨控制。在15000m以上的空间或临界空间,若实现弹体的机动飞行,直接力控制或推力矢量控制是必然的选择,而射流执行机构是连续推力矢量控制的方式之一。
由于机电伺服技术的快速发展,气动舵机正面临着电动舵机的挤压,其应用范围越来越窄。不过由于目前我国适合导弹舵机的电机、减速器及驱动放大器的成本问题,气动舵机以其成本低的特点,还是受到了人们的重视。随着新型材料研究的进展,一些新的机电转换元件被研制,新型的气动阀也不断出现,相信今后在弹上会有新的气动系统的应用。
另外,由于低温高压清洁新型固体推进剂的问世,也可能给气动舵机带来大的转机。
[1]王伟,郭英然,王仕成.小型闭环比例气动舵机建模技术研究[J].弹箭与制导学报,2004(S7).
[2]姚晓先,杨树兴,陈汉超.PWM线性气动舵机控制器的设计及相关问题的讨论[J].兵工自动化,1997(04).
[3]曲雪云,洪峰,邓显伟.一种新型气动舵系统的建模与分析[J].航天控制,2006(03).
[4]彭增辉,姚晓先.射流元件建模与仿真研究[J].弹箭与制导学报,2009(02):55.
[5]王玉芳,杨树兴,徐勇,毛雪瑞.弹体旋转对超音速射流元件的影响研究[J].固体火箭技术,2005(03).
Some PneumaticActuators and TheirApplications
YAO Xiao-xian,HUANG Yi-ming
(School ofAerospace Engineering,Beijing Institute of Technology,Beijing 100081,China)
The work principles and characteristics of pneumatic actuators and fluidic amplifier valves are introduced,the developmemt trend of pneumatic control technology in guidance missile is forecasted according to the characteristics of the pneuamic actuators and the fluidic amplifier devices.
Pneumatic actuator;Fluidic amplifier;Guidance missile;Pneumatic control
TJ762
A
2095-8110(2015)02-0027-07
2014-11-18;
2015-01-09。
姚晓先(1958-),男,教授,主要从事伺服控制方面的研究。E-mail:yxx11@bit.edu.cn
猜你喜欢
天然气与石油(2022年4期)2022-09-21
舰船科学技术(2022年11期)2022-07-15
煤气与热力(2022年4期)2022-05-23
兵器装备工程学报(2021年10期)2021-11-08
农业技术与装备(2020年1期)2020-03-04
电子制作(2018年1期)2018-04-04
北京航空航天大学学报(2017年11期)2017-04-23
航空模型(2016年5期)2016-07-25
航空模型(2015年6期)2015-10-21
中国高新技术企业(2015年17期)2015-05-18