基于Spar平台浮式海上风力机独立变桨距控制研究
2015-04-18 07:26马君豪刘江涛王海云罗建春
四川电力技术 2015年3期
马君豪,刘江涛,王海云, 罗建春,罗 庆
(1.昌吉回族自治州锅炉水处理技术服务部,新疆 昌吉 831100;2. 国网重庆武隆县供电有限责任公司,重庆 408500;3.新疆大学电气工程学院,新疆 乌鲁木齐 830008; 4.国网新疆电力公司电力科学研究院,新疆 乌鲁木齐 830000)
基于Spar平台浮式海上风力机独立变桨距控制研究
马君豪1,刘江涛2,王海云3, 罗建春2,罗 庆4
(1.昌吉回族自治州锅炉水处理技术服务部,新疆 昌吉 831100;2. 国网重庆武隆县供电有限责任公司,重庆 408500;3.新疆大学电气工程学院,新疆 乌鲁木齐 830008; 4.国网新疆电力公司电力科学研究院,新疆 乌鲁木齐 830000)
Spar平台深吃水导致平台俯仰和滚转固有频率较低,因此采用了引入纵荡、横荡自由度的线性状态空间模型的控制设计。为了有效减少风机载荷及更好调节风机出力,提出了基于Spar平台浮式海上风力机独立变桨距控制(IBP)的线性多目标状态反馈控制器模型。同时为了能够较好验证该模型的有效性,对基于基本控制器、扰动干扰控制器以及状态反馈控制器的3种独立变桨距控制进行对比。仿真结果表明:相对于基于可变增益比例积分控制器的统一变桨距控制,基于多目标状态反馈控制器的独立变桨距控制能将塔架前后及侧向弯曲疲劳载荷平均减少9%。
多目标状态反馈;浮式;独立变桨;海上;Spar平台;风力机
0 引 言
浮动式风力机为海上深水发电(深度大于60 m)提供了切实可行的解决办法[1-2]。但是,浮动式平台的采用相应地引入了其他运动,它们可能对风力机载荷及电能的产生带来负面影响。因此,减少这些运动以便更好调节风力机出力及减少风力机载荷的控制系统变得尤为重要。
目前主要有3种形式的浮动式风力机概念。图1给出了这3种概念的浮动式风力机平台:驳船式(Barge)、拉力腿式(TLP)、桅杆式(Spar-Buoy)。
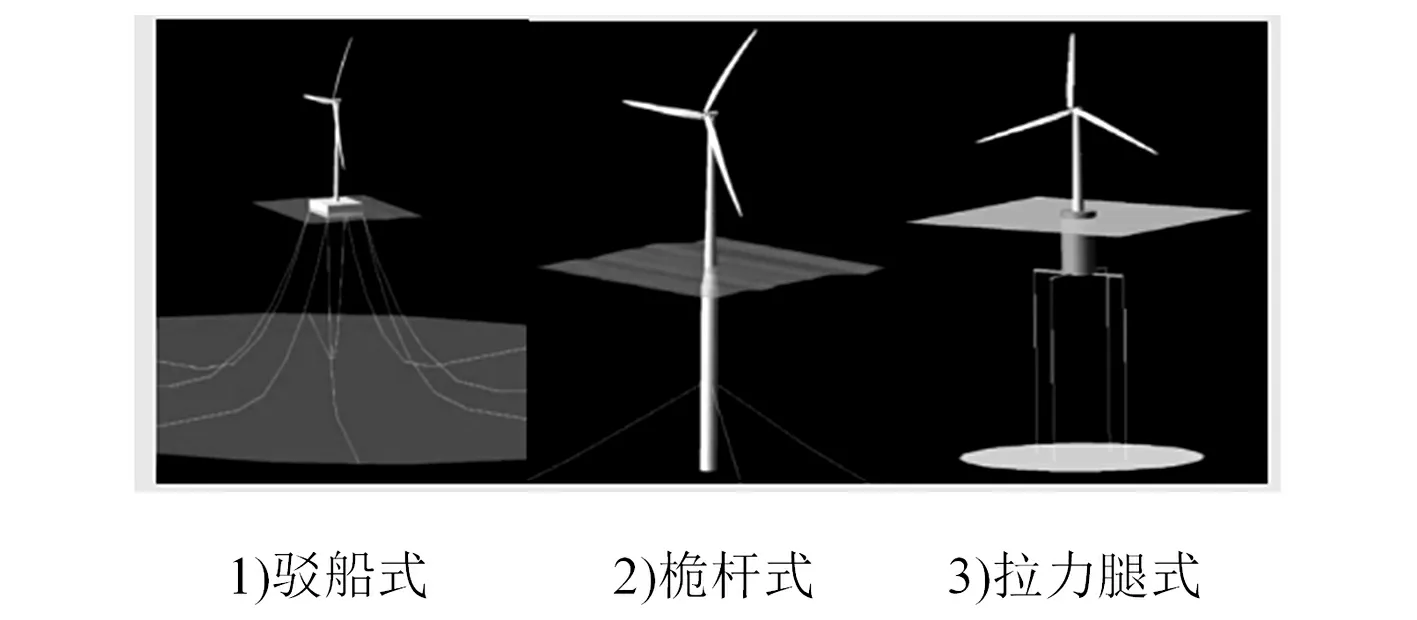
图1 3种浮动式风力机
显然,每种概念都有其优缺性。国内外众多学者早期通常采用排除控制系统影响的简单动态或静态模型来比较这3种平台[1,3,6]。
目前有对桅杆式风力机有功控制系统进行动态分析的文章。但是,这些研究主要是利用统一变桨距手段,通过单一目标控制器对转速进行调节。Jonkman与Matha[8,10]采用可变增益的比例积分控制器针对这3种平台进行了大量的分析,结果表明驳船式平台需要的塔架最高,风机叶片承受载荷最大,并且其支撑风力机的平台运动最大,桅杆式(Spar-Buoy)平台的载荷比驳船式平台的小,并且其平台运动相对稳定,而拉力腿式(TLP)平台是最好的。
Nielsen[1]等人提出了一种主动控制策略来避免平台结构性共振。为了避免风机变桨距运动产生谐振运动并提高风机疲劳寿命,尼尔森等人又提出一个基于估计器的控制器。实验结果表明该控制器虽能提高塔架和叶片的疲劳寿命,但却减少了风力机的出力。
Larsen和Hansen[12]采用与文献[1,11]中相同的桅杆式平台,由于浮动结构过低固有频率引起的平台俯仰运动的负阻尼效应,因此采用了PI转矩控制器和可变增益比例积分(GSPI)桨距角控制器限制变桨距的使用提高平台阻尼。该控制器提高了阻尼但却加剧了转速与功率变化,即使在使用了恒转矩算法之后。
文献[12]对采用基于线性状态反馈与扰动调节(DAC)的多目标控制器的驳船式、拉力腿式平台进行了分析研究。多目标控制器利用独立变桨距建立必要的转子对称和不对称气动恢复力。该控制器也称之为基本控制器,相对于GSPI控制器,这种组合显然提高了风力机性能。
这里采用文献[12]中的多目标控制器,提出了基于Spar平台浮式海上风力机独立变桨距控制(IBP)的线性多目标状态反馈控制器模型。同时为了能够较好验证该模型的有效性,对基于基本控制器、扰动干扰控制器以及状态反馈控制器的3种独立变桨距控制进行对比。根据IEC-61400-3标准的设计载荷工况1.2对Spar平台疲劳载荷在正常运行条件下进行了测试。仿真结果表明:相对于基于可变增益比例积分控制器的统一变桨距控制,基于多目标状态反馈控制器的独立变桨距控制能将塔架前后及侧向弯曲疲劳载荷平均减少9%。
1 建立桅杆式(Spar-Buoy)平台模型
桅杆式(Spar-Buoy)平台采用深吃水的压载物来维持其静力稳度,悬链系泊绳索来定位。这里采用的桅杆式(Spar-Buoy)平台模型是为人们所熟知的“OC3-Hywind”桅杆式,它是基于Hywind桅杆式模型。表1列出了OC3-Hywind桅杆式模型性能参数。
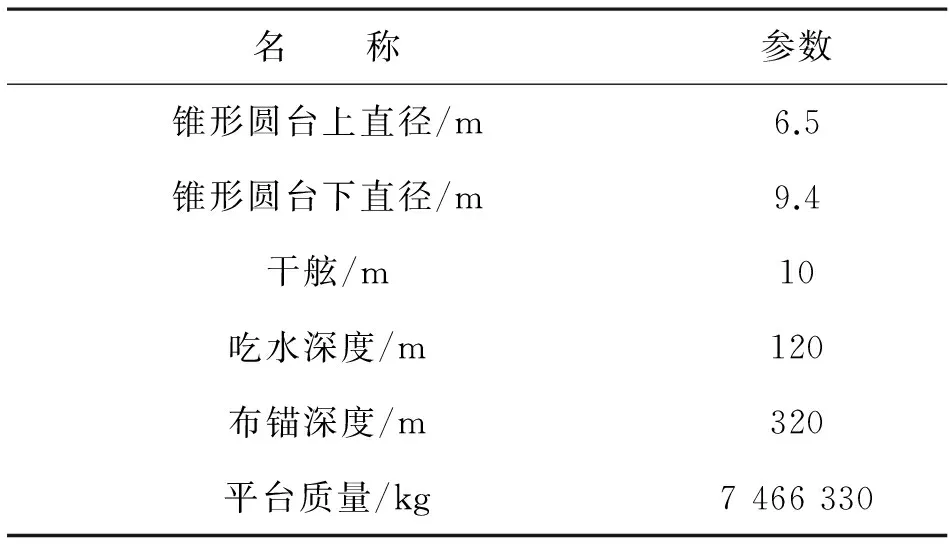
表1 桅杆式平台主要参数
这里采用单台5 MW风力发电机,该风机是一个上风式风力机,其主要参数见表2。
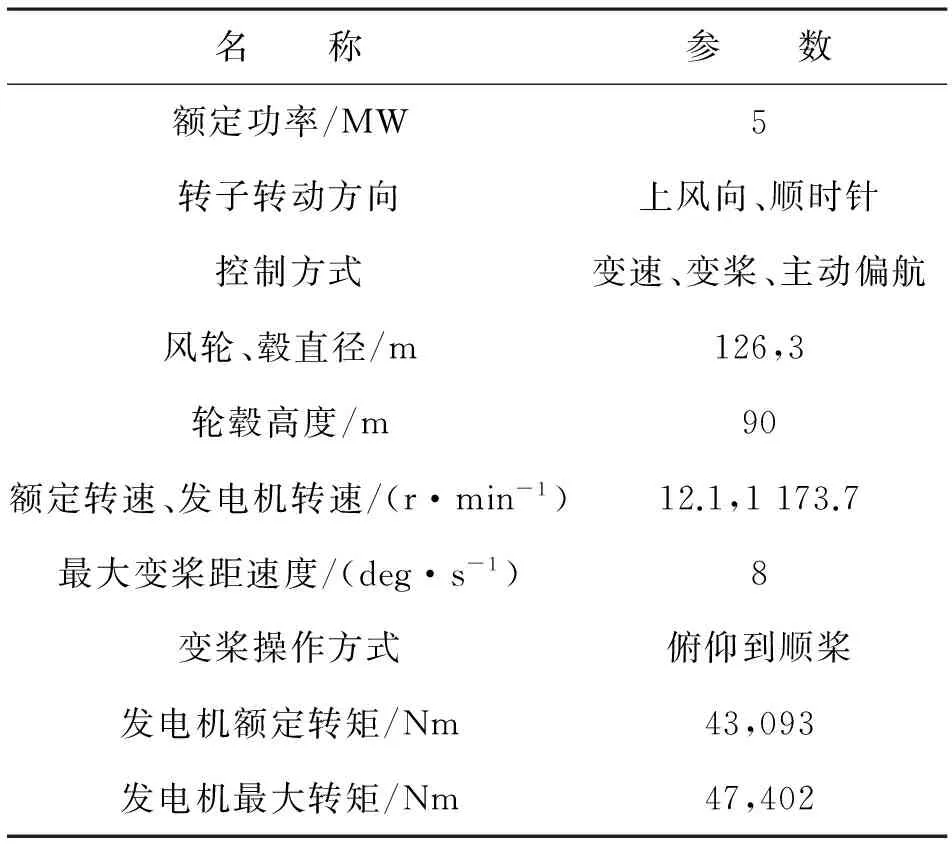
表2 NREL 5-MW风力机主要参数
2 仿真条件
采用FAST仿真代码仿真浮动式风力机的响应,并采用MATLAB中动态仿真模块Simulink设计控制策略,最后与FAST软件配合实现整个过程的仿真。
2.1 仿真条件
仿真的实现参照IEC 61400-3标准中DLC(设计载荷工况)1.2,即疲劳载荷在正常运行条件下,并在表3中给出了仿真条件。由于迄今为止还没有统一的浮动式风力机标准,因此下面将采用DLC1.2标准实现仿真。
由于研究的是超过额定风速的区域,因此DLC
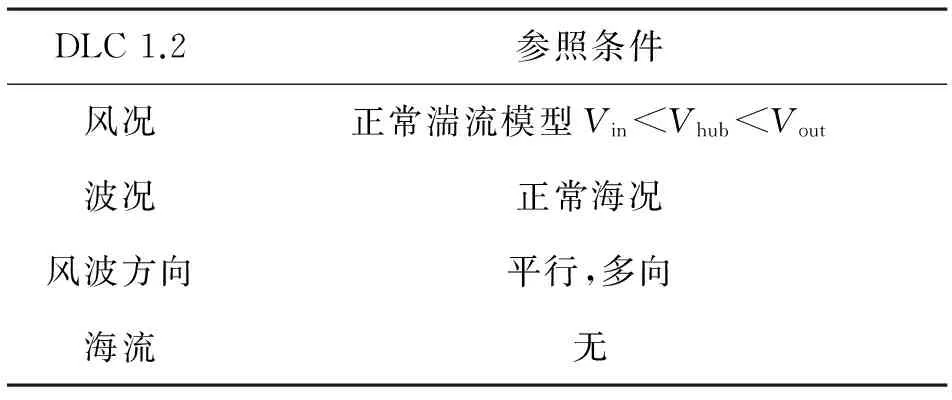
表3 设计载荷工况1.2参照条件
其中,Vin为切入风速;Vhub为轮毂风速;Vout为切出风速。
分析的范围限定在风速段为15~24 m/s的风速之间,并以1 m/s的速度递增。根据IEC标准要求,对每个风速段采用不同的随机种子产生6个600 s的干扰风速谱及不规则的波浪谱。基于相同参考地点选择位于苏格兰的东北部波浪条件[8],该地点针对相对应平均风速产生单一有效波高及一系列的波周期。采用 TurbSim[24]子程序产生全区域的随机风速谱,并采用FAST软件产生随机波浪谱。为了考察不同平台的动力学响应,在同一工况中,所有平台所施加的风速谱、波浪谱均相同,分析时间都为 600 s。

表4 观测性能趋势类型
每个控制器通过所有60次600 s仿真得到仿真结果。仿真模型将通过FAST软件实现,该模型含有22个自由度,并能够使用干扰风速谱、随机波浪谱。当平均风向保持不变时,风力机的偏航自由度(DOF)也保持锁定状态,因为此时不需要主动偏航控制。下面将采用功率的均方根(RMS)、转速误差、风力机关键部件在选择参考频率为1 Hz时的疲劳损害等效载荷(DEL)以及平台旋转矢量的均方根等指标评估控制器的性能。
将它们相应的风速段仿真结果的性能指标进行平均。但是,实际的风力机不可能在每个风速段花费等量的时间。因此,将对总体平均性能指标采用加权平均的方法,其中加权平均是采用威布尔分布计算权重或者比例因子。另外,还对风速段的平均归一化性能指标趋势进行了讨论。表4中列出了观测趋势的类型。
3 控制器的实现
3.1 基本控制器
在超过额定风速的区域,基本控制器将由2个单独的控制回路组成,图2给出了该回路。其中ud作为扰动输入矢量;η为风力发电机的效率。第1个控制回路是一个统一变桨距的GSPI控制,主要是为了调节转速达到额定转速。增益调节作为变桨距的函数是为了说明不同风速时风机灵敏度的变化。
另一个控制回路采用了2种发电机转矩可能配置中的一种。
1)恒功率算法:为了尽可能降低发电机转矩对功率的影响,需要改变风机转速与发电机转矩成反比例的关系;
2)恒转矩算法:保持发电机转矩的恒定,可以改善转速的调节并可减少风机载荷对功率的影响。
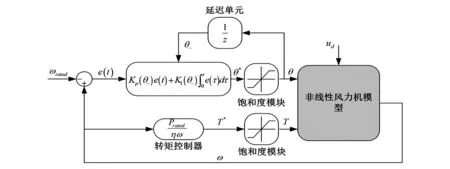
图2 在超过额定风速区域对转矩控制器采用恒功率算法的基本控制器的框图
该控制器将作为基本控制器与新控制器的性能进行比较。
3.2 状态反馈控制器
在处理多目标的多输入输出系统时,线性状态反馈控制器往往作为首选的控制器类型之一。这种方法通常要求一个非线性浮动系统的线性状态空间模型。因此,系统状态x,扰动Δx以及被选择的操作点xop之间满足:x=Δx+xop。状态反馈控制规律,即:Δu=-KΔx,式中,K为状态反馈控制增益矩阵。图3给出了该控制器实现的逻辑框图。
文献[26]为了解决风机的周期性问题采用了多桨叶协调(MBC)转换。多桨叶协调转换允许在转换后的非旋转参考系进行线性时不变设计。独立变桨距允许控制器在转子上建立不对称的气动载荷以外并通过统一变桨距建立对称的气动载荷。对于转速与平台俯仰调节来说,不对称载荷的实用性有效的解决了变桨距指令不一致的问题[13]。
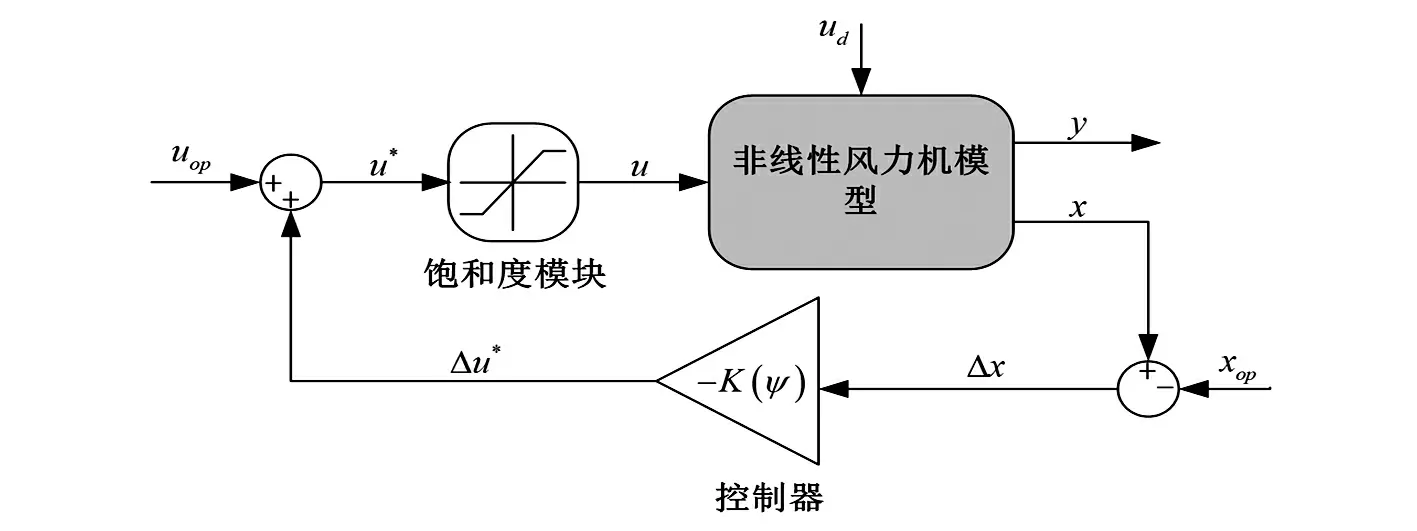
图3 独立变桨状态空间控制器实现框图
控制规律要求所有状态信息都能够通过测量或者估计得到。采用全状态反馈(FSFB)来实现状态空间控制器,即可以直接测量所有状态。对于所设计的所有状态空间控制器而言,所选的设计状态可以很容易通过现有传感器来测量。减少所需传感器以实现一个状态估计器在实际中是可取的,但是只做一个探索性的描述。
3.3 扰动调节控制器

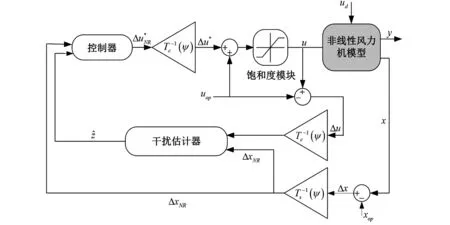
图4 浮式风力机采用全状态反馈的扰动调节控制器的实现框图
4 仿真结果及其讨论
通过对状态反馈控制器与扰动调节控制器的对比得出设计载荷工况性能分析结果,并对基于基本控制器的桅杆式平台进行了归一化处理。
4.1 平均归一化结果
图5给出了所有的平均与归一化结果。状态反馈控制器能使得塔架疲劳损害等效载荷减小9%。除了均方根误差、变桨速度、低速轴扭曲疲劳损害等效载荷以外,其他所有指标仍然接近于不变。虽然其转速调节性能本质上类似于基本控制器,但是功率误差却大幅减少64%,主要是由于状态反馈控制器对转矩操作点采用了恒功率算法。气动转矩加剧波动使得变桨距速度相应地大幅增大并因此影响了轴转矩,所以变桨距速度的增大对低速轴疲劳载荷产生了负面影响。相对于从驳船式平台相同类型的控制器获得的相关性能指标都有大幅减少[14],而大多数状态反馈控制器的相关性能指标却接近不变,主要有以下两个原因:1)与驳船式平台不同,所采用的基本控制器的性能很好,转速受到严密的调控,并且平台俯仰运动的角度始终低于5°;2)由于独立变桨距的有效性是受限的,因此控制器需要驱动桨叶获得所需的驱动力。但是,由于现存驱动器饱和,基于状态反馈控制器的独立变桨距控制仅能有限的影响浮动式风力机。因此,相对于基本控制器而言,状态反馈控制器仅能有限的改善桅杆式平台。
扰动调节控制器能通过减少风速扰动的影响或者增加变桨距的使用来改善转速调节,并最终达到改善功率调节的效果;然而,增加变桨距驱动会对平台的滚转及偏航运动产生负面影响,因此塔架侧向载荷平均增加了9%。
扰动调节控制器前馈项的运行要远离线性化点;远离线性化点的风机运行,并进一步驱动桨叶。系统的非线性化意味着扰动调节控制器为了将风速扰动远离线性化点的影响最小化,对桨叶要么过驱要么驱动不足。为了能够利用扰动调节控制器对风速扰动的抑制作用,扰动调节控制器需要进一步缓解转速调节达到对状态反馈控制器调节的预期影响。
根据既定风速段仿真的性能趋势,表6根据表4中定义的4种类型趋势对状态反馈控制器与扰动调节控制器的趋势进行了总结。有趣的是,对于桅杆式平台的2种控制器的某些性能指标来说,它们表现出了随风速增大渐增的趋势。由此表明驱动器的受限影响了这些控制目标。这种限制可能是由于独立变桨距的有效性受限引起的;从增大增益的角度看,现存驱动器饱和也限制了控制器的设计。
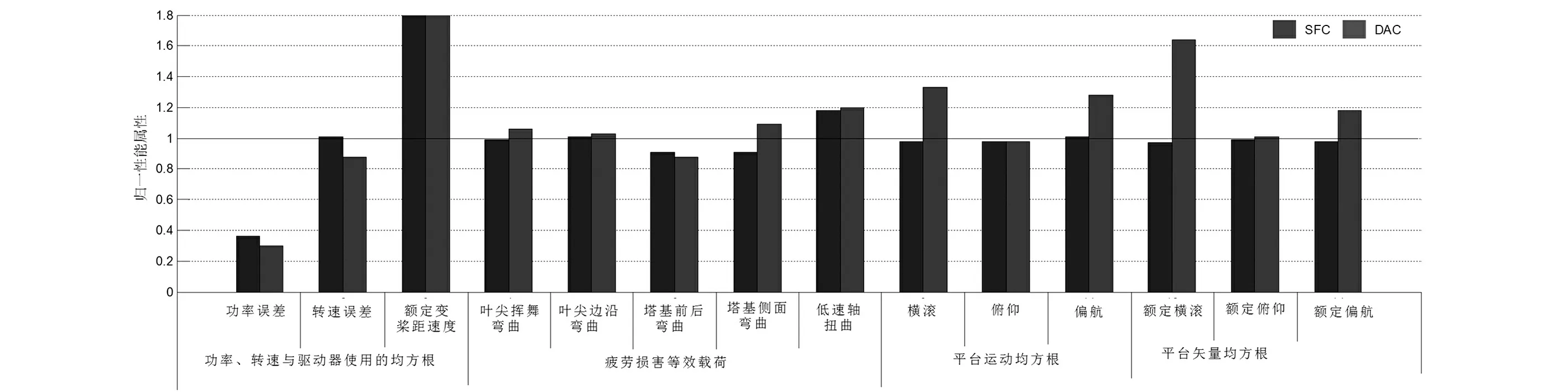
图5 相对于桅杆式平台的基本控制器对桅杆式平台设计载荷工况进行平均归一化的结果

趋势SFCDAC定常型叶尖边沿疲劳损害等效载荷塔架前后及侧向疲劳损害等效载荷平台矢量塔架前后疲劳损害等效载荷低速轴疲劳损害等效载荷平台俯仰、偏航矢量递增型叶尖挥舞疲劳损害等效载荷平台运动平台横荡及平台运动平台横荡矢量递减型转速误差低速轴疲劳损害等效载荷转速误差低速轴疲劳损害等效载荷叶尖边沿疲劳损害等效载荷抛物线型功率误差功率误差平台偏航叶尖挥舞疲劳损害等效载荷
状态控制器(图6(a))与扰动调节控制器(图6(b))的抛物线型功率误差趋势也许看起来不合常理,随着风速的增大转速误差随之改善,功率误差也理应如此变化。但是,由于2种控制器都采用了相对宽松的转速控制,并通过增加发电机转矩来补偿,因此达到了各自最大饱和度限制。随着风速增大转速波动也随之加剧。这样反而增大了发电机转矩饱和的周期,进而导致了功率调节比在低风速时更加差强人意。
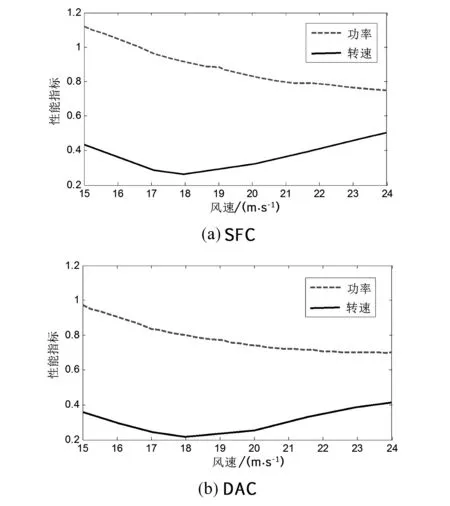
图6 随着平均风速增大转速与功率调节误差的趋势
表5中并未把塔架侧向弯曲疲劳损害等效载荷包括在扰动调节控制器趋势中,因为它并不属于4种趋势类型中的任何一种。如图7所示,平台的滚转运动引起了指标的大幅波动。
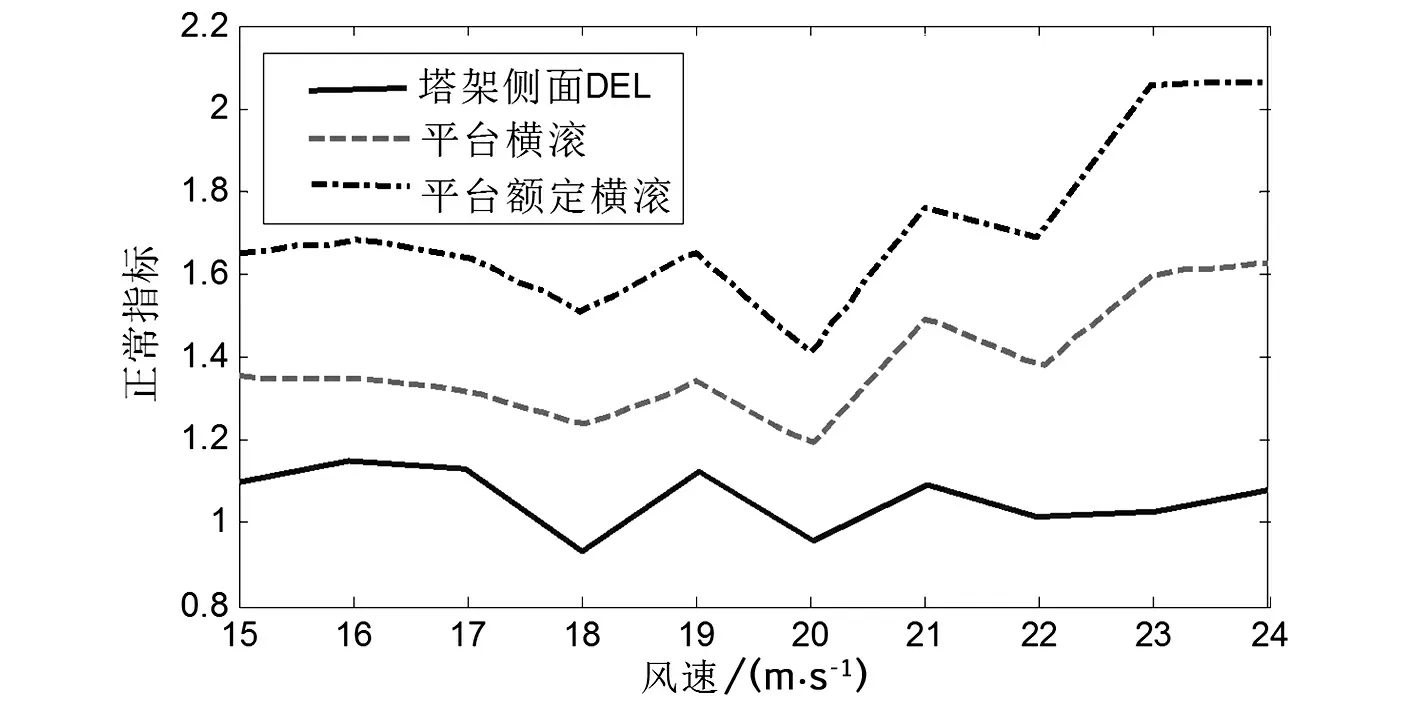
图7 平台滚转运动对塔架侧向弯曲趋势的影响
因为状态反馈控制器性能普遍优于扰动调节控制器,考虑到现有驱动器的限制,认为状态反馈控制器更适合桅杆式平台独立变桨距控制。
4.2 采样时序结果
图8给出了基本控制器与状态反馈控制器的独立变桨距控制采样时序响应。由于2种控制器的转速调节性能几乎一致,因此给出了发电机输出功率的对比。从图中可以看出状态反馈控制器的功率调节明显优于基本控制器,这是因为状态反馈控制器对转矩操作点采用了恒功率算法。图8中塔架前后及侧向弯曲力矩的高频频谱为塔架前后及侧向第1个弯曲模式下的固有频率。塔架力矩的低频变化是由平台俯仰和滚转运动引起塔架前后及侧向载荷变化所致。

图8 桅杆式平台上基本控制器与SFC采样时序响应
从图8中可以清楚地看到塔架前后及侧向底部载荷在减小。从图8中可以看出状态反馈控制器的叶片1桨距角的变化趋势紧随基本控制器的统一变桨距的桨距角轨迹。既然2种控制器都有着相似转速调节性能,这就表明基于状态反馈控制器的大多数改进能够实现平台的独立变桨控制,尽管其在高频部分的效力有限。图9(a)给出了在特定频率下塔架前后底部弯曲载荷减小的曲线,特别是在平台俯仰运动固有频率为0.03Hz时。然而,从图9(b)中可以看出,在平台滚转固有频率为0.03Hz时,塔架侧向底部力矩却出现一定的增长。这种由平台滚转谐振频率改变引起的增长是因为将平台横荡排除在了基于相同原理的线性模型之外。由于变桨距驱动器的效力已经达到极限,因此平台横荡自由度未包含到控制设计中。另外,塔架侧向载荷的减小应归功于包含了平台横荡自由度的设计并未改变整个桅杆式平台的可行性。
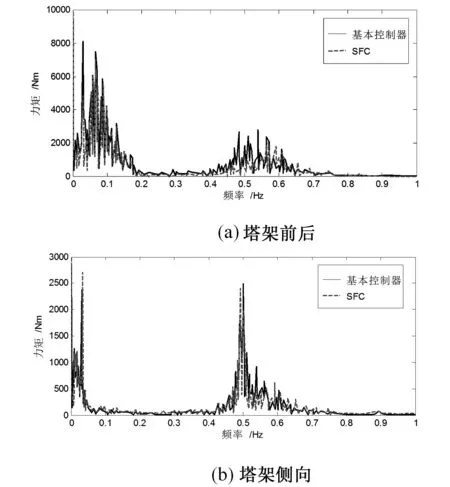
图9 塔基力矩的频谱图
5 结 论
桅杆式平台采用系有深吃水压载物的悬链系泊缆绳定位,有效地实现了静力稳度。桅杆式的深吃水明显增加了平台的滚转与俯仰惯性,因此减小了它们各自的固有频率。这种设计特性使得平台的滚转与俯仰频率低于大多数海况下波浪的激发频率。
1)平台较低的俯仰频率影响了状态反馈控制器的控制设计选择何种自由度。增加平台纵荡自由度与第一个塔架前后弯曲模式到线性模型以获取平台俯仰运动动力学所需必要技术特征。
2)平台较低的俯仰频率的另一个影响是限制了独立变桨距对调节平台俯仰运动的作用。较低的固有频率相对于其他的浮动式平台意味着高频变桨距输入在进一步衰减。在高频的要求下,控制器可以增加驱动得到相同效果,因此,桅杆式平台独立变桨距并不比其他平台更加有效。但是,变桨距驱动饱和度限制对控制器增益强加了一个上限,因此降低了独立变桨在桅杆式平台的有效性。
3)状态反馈控制器与扰动调节控制器都对转矩控制采用了恒功率算法,与采用恒转矩算法的基本控制器相比,它们明显改善了功率调节。相对于基本控制器,状态反馈控制器能够将塔架疲劳损害等效载荷平均减小9%。除了低速轴扭曲损害等效载荷平均增大18%之外,其他所有指标仍然接近不变。这种增长是由于变桨距驱动相对显著增长的结果。
4)扰动调节控制器能够通过增加变桨距驱动抑制风速扰动来改善转速调节进而改善功率调节。但基于扰动调节控制器的变桨距驱动的明显增长给平台俯仰与偏航运动带来了负面影响。考虑到现有驱动器的限制,认为状态反馈控制器更适合桅杆式平台的独立变桨距控制。
[1]F.G.Nielsen,T.D.Hanson,andB.Skaare.IntegratedDynamicAnalysisofFloatingOffshoreWindTurbines[C].inProc. 25thInt.Conf.OffshoreMech.ArcticEng., 2006:671-679.
[2]W.Musial,S.Butterfield,andB.Ram.EnergyfromOffshoreWind[C].inProc.OffshoreTechnol.Conf.,Houston,TX,USA, 2006:1888-1898.
[3]B.Bulder,J.Peeringa,J.Pierik,etal.FloatingOffshoreWindTurbinesforShallowWaters[C].inProc.Eur.WindEnergyConf,2003.
[4]W.Musial,S.Butterfield,A.Boone.FeasibilityofFloatingPlatformSystemsforWindTurbines[C].inProc. 23rdASMEWindEnergySymp, 2004:1-11.
[5]I.Ushiyama,K.Seki,H.Miura.AFeasibilityStudyforFloatingOffshoreWindFarmsinJapaneseWaters[J].WindEng., 2004,28(4):383-397.
[6]S.Butterfield,W.Musial,J.Jonkman,etal.EngineeringChallengesforFloatingOffshoreWindTurbines[C].inProc.CopenhagenOffshoreWindConf.Expedit., 2005:1-10.
[7]D.Biester. (2009,Jul. 3).Hywind:SiemensandStatoilHydroInstallFirstFloatingWindTurbine[Online].Available:http://www.siemens.com/press/pool/de/pressemitteilungen/2009/renewable_energy/ERE200906 064e.pdf.
[8]J.M.Jonkman.DynamicsModelingandLoadsAnalysisofanOffshoreFloatingWindTurbine[D].Ph.D.DissertationDepart,Aerosp,Eng.Sci.Univ.Colorado,Boulder,CO,USA, 2007.
[9]D.Matha.ModelingandLoads&StabilityAnalysisofaFloatingOffshoreTensionLegPlatformWindTurbine[C].M.S.thesis,NationalRenewableEnergyLab′sNationalWindTurbineCenter,Stuttgart,Germany, 2009.
[10]J.Jonkman,D.Matha.AQuantitativeComparisonoftheResponsesofThreeFloatingPlatforms[C].NationalRenewableEnergyLaboratory,Golden,CO,USA,Tech.Rep.NREL/CP-46726, 2010.
[11]B.Skaare,T.D.Hanson,F.G.Nielsen.ImportanceofControlStrategiesonFatigueLifeofFloatingWindTurbines[C].inProc. 26thInt.Conf.OffshoreMech.ArcticEng.,SanDiego,CA,USA, 2007:493-500.
[12]T.J.Larsen,T.D.Hanson.AMethodtoAvoidNegativeDampedLowFrequentTowerVibrationsforaFloating,PitchControlledWindTurbine[C].J.Phys.,Conf,Ser.,2007,75(1):012073.
欢迎订阅《四川电力技术》
The deep draft of spar-buoy results in the low platform pitch and roll natural frequencies. Therefore, the control design of linear state-space model which includes the surge and sway degrees of freedom is adopted. In order to effectively reduce the loads and adjust the output power of wind turbine, the state feedback controller model of linear multi-objective based on individual variable pitch control of floating offshore wind turbine in the Spar platform is proposed. And in order to verify the validity of the proposed model, three kinds of individual pitch controls based on the basic controller, disturbance-accommodating controller and a state feedback controller are compared. Simulation results show that compared to collective pitch control based on a gain-scheduled proportional-integral controller, individual variable pitch control based on a multi-objective state feedback controller is able to reduce the tower FA (fore-aft) and side-side bending fatigue loads by an average of 9%.
multi-objective state feedback; floating; individual blade pitch (IBP); offshore; Spar-buoy; wind turbin.
教育部创新团队项目(IRT1285);国家自然科学基金项目(51267017);自治区重大攻关项目(201230115)
TM763
A
1003-6954(2015)03-0001-07
2015-04-07)
猜你喜欢
上海航天(2022年5期)2022-12-05
阅读时代(2021年6期)2021-09-10
通信电源技术(2020年17期)2020-12-28
哈尔滨轴承(2020年1期)2020-11-03
东方少年·快乐文学(2020年8期)2020-10-20
幸福·婚姻版(2017年2期)2017-02-16
通信电源技术(2016年1期)2016-04-16
中央民族大学学报(自然科学版)(2015年1期)2015-06-11
电气传动自动化(2014年6期)2014-03-20