基于DSP的直流伺服电机数字控制系统
2015-04-15 07:30:05王玄玄广东工程职业技术学院广东广州510520
机电工程技术 2015年8期
王玄玄(广东工程职业技术学院,广东广州 510520)
基于DSP的直流伺服电机数字控制系统
王玄玄
(广东工程职业技术学院,广东广州510520)
摘要:现有的直流伺服电机模拟控制系统存在器件精度要求高、控制稳定性差等问题。为此,提出了一种基于DSP的数字控制系统,并对DSP控制算法的实现进行了详细介绍。该系统采用PI调节方式,使用DSP作为数字化电机控制系统的核心,可以克服旧有控制系统结构复杂、控制精度低、成本高的不足,并能使各种先进的控制理论应用于实际控制中,使电机控制的性能和水平大为提高。
关键词:直流电机;DSP;数字控制;控制算法
0 引言
直流电机是最早出现并得到广泛应用的电机,具有调速性能好、容易实现调速等优点,在工程应用中已得到广泛应用。在有速度控制和位置控制的场合,尤其是在各种伺服系统中,直流电机的应用最为广泛。要实现一个用于直流电机控制的伺服系统,过去通用的方法是利用高精度的器件构成一个开环回路,或者利用各种运算放大电路并结合自动控制理论构成一个闭环回路。这种开环或闭环回路组成的控制系统称为模拟控制系统。开环回路对器件精度要求高,会导致系统成本上升;而闭环回路虽然可采用较低精度的器件实现系统的高精度控制,但是随着现场温度的变化和器件的老化,模拟器件的各种参数都会产生变化,控制系统的特性也会随之而变化,整个系统有可能因此而变得不稳定甚至崩溃。除此以外,模拟控制系统的结构相当复杂,生产、调试、维修都需要专门的技术人员,使生产、使用成本居高不下。正是由于模拟控制系统存在着上述种种不足,开发一种新的数字控制系统来取代旧有的直流伺服电机模拟控制系统便迫在眉睫。
随着现代制造技术和控制技术的高速发展,近年来直流电机的结构和控制方式发生了很大变化。计算机和嵌入式系统在自动控制领域的应用,以及新型半导体功率元器件的发展,使得全控型的开关功率管被用作电机功率驱动管,从而实现电机的PWM(脉宽调制)控制。这种方法作为一种主流控制方式,已成为伺服电机数字控制的基础。同时,利用微机和单片机结合数字控制理论而实现的数字控制系统把电机控制推进到信息化时代。但是,以微机和单片机构成的数字控制系统并不完美,这是因为微机的体积太大而单片机的运算能力又不足,且都需要复杂的外围电路才能实现对电机的控制。DSP(数字信号处理器)的出现,为伺服系统的控制提供了一个新的实现手段。
DSP控制是完全的数字化控制,从采样、运算到输出都是以数字形式进行[1-2]。由于数字电路不存在温漂问题,不受参数变化的影响,因此从根本上解决了模拟控制电路的参数变化和老化问题。同时,DSP芯片上集成了控制系统要用到的全部外设,所以系统的可靠性和稳定性远远超过由分立元件搭建的模拟控制电路和旧的微机、单片机控制电路。另外,DSP具有高速运算、地址寻址和数据寻址分开、浮点运算和乘法直接运算等性能,因此能够顺利实现电机控制所需要的各种控制理论算法,如模糊控制、空间矢量控制等[3-4]。本文就如何用DSP实现直流伺服电机的数字控制进行了探讨。
1 电机控制原理
直流伺服电机的控制原理如图1所示。电机转速通过传感器反馈到输入端,构成闭环控制。这里的传感器通常为旋转式编码盘,它可以反馈电机的角速度。电机在方向控制信号和PWM控制信号下,实现其调速及正反转。
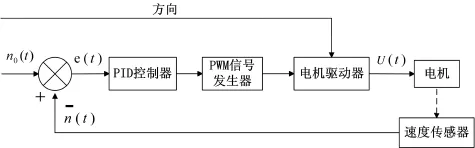
图1 电机控制原理图
PWM调速控制主要是调整控制的占空比α。改变占空比的常用方法有定宽调频、调宽调频和定频调宽3种。其中定宽调频和调宽调频主要是通过改变输出给电机的脉冲周期实现电机速度的调整,如果脉冲频率和电机的固有频率接近,采用这两种方法会引起电机的振荡,因此目前常采用定频调宽来进行伺服电机的调速。
2 基于DSP的数字控制系统的实现
2.1电机转速的PI调节原理
直流电机调速系统以转速作为输入,且要求电机的转速跟随给定值。文中采用双闭环控制模式,即对伺服电机的速度环和电流环进行控制[5]。
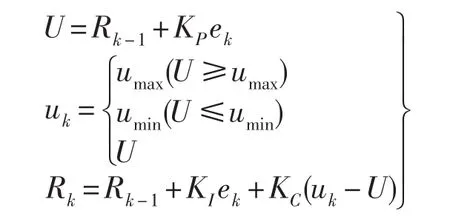
对于伺服电机,采用饱和PI调节的算法来调节电机转速,具体如下:
2.2 DSP控制算法的实现
2.2.1电机的电流环控制
(1)电机的电流检测
由于电流环是直流电机控制内环,因此要求电流值检测数据可靠且实时。研究中采用霍尔电流传感器获得电流信号[6],这种传感器属于非接触型电流传感器,对电机的运转性能没有影响,且无发热问题,是理想的电流检测用传感器。
(2)电机驱动的电压检测
由于在DSP的A/D(模数转换)和常用的A/D芯片里,参考电压高电平VREFHI和参考电压低电平VREFLO通常要满足VREFHI≤Vcc、VREFLO≥Vss和VREFHI≥VREFLO这3个条件,即电流检测所转换的电压输入信号只能在VREFHI和VREFLO之间,亦即必须在Vcc和Vss之间,所以需要把输入信号的零点进行偏置。为达到上述目的,用运放做了一个电压放大偏置电路,如图2所示。
A/D采样方案原计划是利用DSP自带的A/D,在每个PWM周期的开始采样,并做电流环的调制。但在实际使用中发现该方案无法正常工作,采集到的电压信号与实际有很大出入。经过检查,发现PWM在晶体管通断的时候肯定会造成电流的波动,因此要对电流采样就必须对其做一个低通滤波处理,将输入信号取直流分量。故此,将对信号的采样频率提高,并对采样值进行平均值运算。这样一来,在PWM周期中完成采样的方法就行不通了,必须用另外一个时钟信号来控制采样。为了节省控制器上的定时器资源,使用SPI接口的TLC1543来做A/D采样处理和转换,利用控制器与外部A/D的通信间隔作为电流信号采样的周期。
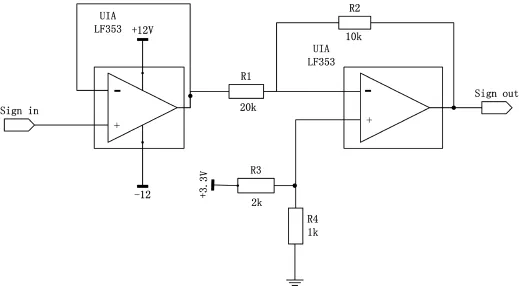
图2 电机驱动电流信号放大偏置电路
(3)电流环控制算法
电流环的控制采用防积分饱和的PI控制算法。其中A/D采样值的MSB(最高有效位)在实际使用中不需要再右移,因为把所获得的采样值用Q15格式的数值表示就可直接在实际运算中使用。程序主体代码如下:

I_Rk+=((INT32S)I_Ki * I_Ek)>>12;
CMPR4=((INT32S)(st⁃mp+ (1<<12)) * I_U_Max)> >12;
2.2.2电机的速度环控制
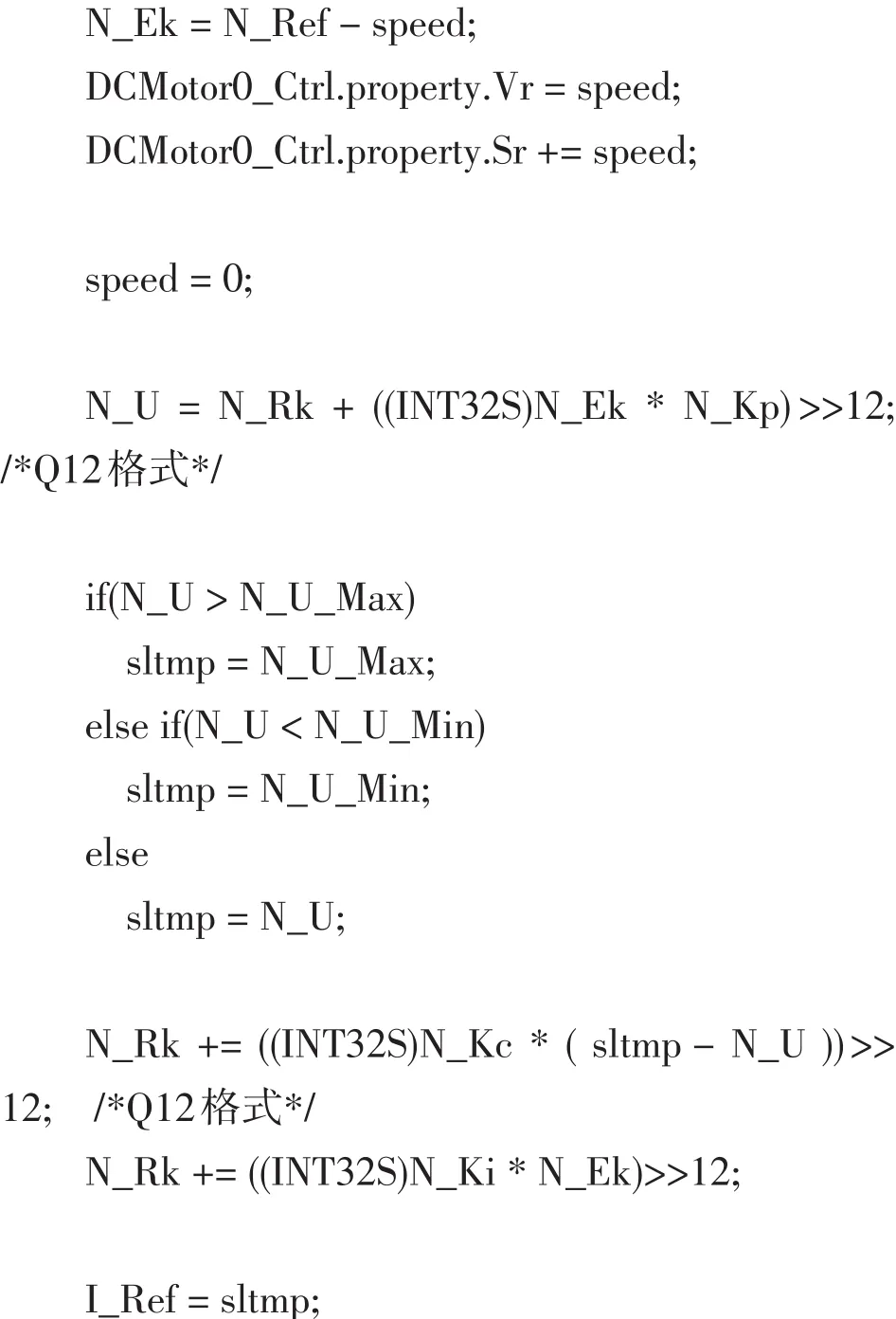
电机转速数据的采样是读入DSP的QEP(正交编码脉冲)中寄存器值,由于QEP模块能够实现对编码器信号的微分和倍频处理,因此它能够根据输入的编码器A/B相信号的相位差确定电机计数方向的正反,电机正转寄存器中的值加1,电机反转则数值减1。电机的速度控制也采用了防积分饱和的PI控制器算法。程序主体代码如下:
2.2.3速度环中的加速度控制
速度环中的加速度控制是在电机控制任务中实现的。程序主体代码如下:
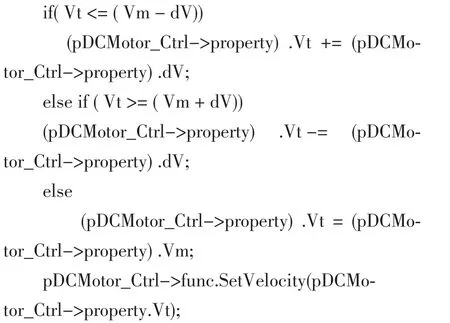
其中,通过定时对电机状态进行检测,若当前目标速度Vt与最终目标速度Vm不等,就对当前目标速度Vt加上或减去加速度值dV,直至最终当前目标速度Vt与最终目标速度Vm相等。
2.2.4电机控制命令
直流电机控制命令如下:
motor load装载直流电机驱动任务,并使能直流电机
motor unload卸载直流电机驱动任务,并禁止直流电机
motor set -<参数名> <参数>……
具体的参数名及对应的功能见表1。
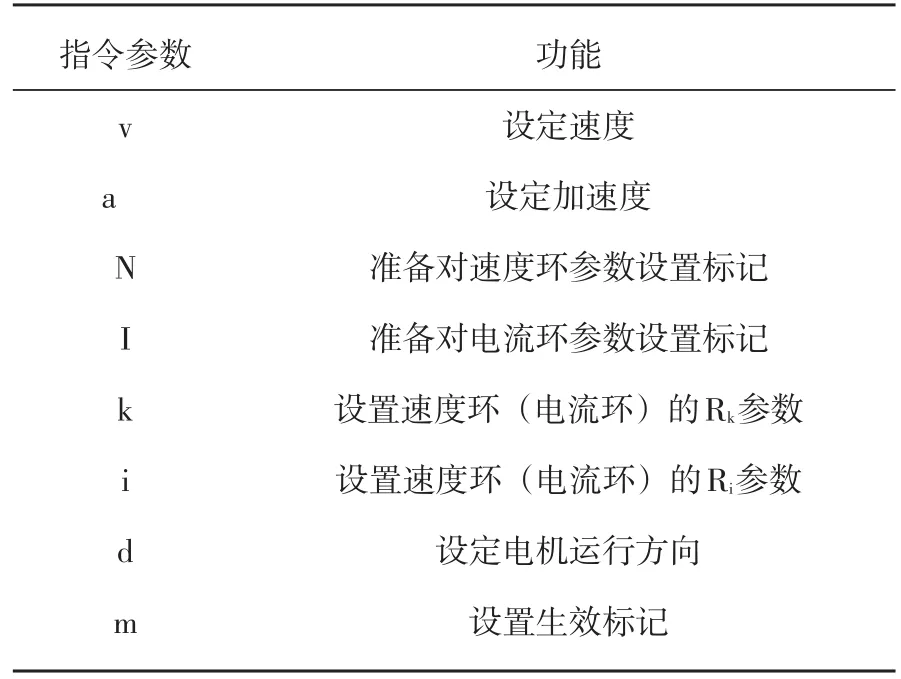
表1 电机控制指令参数及其功能
直流电机在装载后可从液晶屏上监视其运行状态。
3 结语
文中针对直流伺服电机模拟开环控制器件精度要求高、模拟闭环控制稳定性差的缺点,提出了一种基于DSP的数字控制方法,并对数字PI控制的算法原理进行了详细说明。该数字控制系统在工程实践中成功应用,取得了较为理想的控制效果。后续拟更深入地探讨进一步提高系统控制精度和稳定性的有效方法。
参考文献:
[1]王潞钢,陈林康,曾岳南,等.DSP C2000程序员高手进阶[M].北京:机械工业出版社,2005.
[2]刘和平,王维俊,江渝,等.TMS320LF240x DSP C语言开发应用[M].北京:北京航空航天大学出版社,2003.
[3]谢宝昌,任永德.电机的DSP控制技术及其应用[M].北京:北京航空航天大学出版社,2003.
[4]李方圆,李晓.基于DSP直流电机调速系统的设计[J].数字技术与应用,2012(12):128-130.
[5]周美兰,贾成禹.一种直流电机数字控制系统的设计与实验研究[J].黑龙江大学自然科学学报,2009,26(6):825-829.
[6]Briz F,Degner M W,Lorenz R D.Analysis and design of current regulators using complex vectors[J].IEEE Transactions on Industry Applications,2000,36(3):817-825.
(编辑:向飞)
Digital Control System of DC Servo Motor Based on DSP
WANG Xuan-xuan
(Guangdong Engineering Polytechinc,Guangzhou510520,China)
Abstract:As the existing analog control systems of DC servo motor are of low stability and need high-accuracy devices,a digital control system based on DSP is proposed,and the corresponding implementation schemes of DSP control algorithm are discussed in detail.In the proposed system,a PI adjustment manner is adopted,and a DSP is used as the core for the digital control.Thus,the disadvantages of the existing control systems,namely complex structure,low control accuracy and high cost,are overcome.Moreover,with the help of the proposed system,some advanced control theories can be effectively applied to practical engineering,and the performance and accuracy of motor control are remarkably improved.
Key words:DC motor;DSP;digital control;control algorithm
作者简介:王玄玄,女,1984年生,山西运城人,硕士,助教。研究领域:计算机技术及应用。
收稿日期:2015-07-09
DOI:10.3969/j.issn.1009-9492.2015.08.028
中图分类号:TP29 TP39
文献标识码:A
文章编号:1009-9492 (2015 ) 08-0102-04
猜你喜欢
大电机技术(2022年5期)2022-11-17 08:12:56
制造技术与机床(2017年6期)2018-01-19 02:41:07
电子制作(2017年1期)2017-05-17 03:54:12
电子制作(2016年15期)2017-01-15 13:39:26
电子器件(2015年5期)2015-12-29 08:43:46
电子器件(2015年5期)2015-12-29 08:42:59
电源技术(2015年9期)2015-06-05 09:36:06
淮南师范学院学报(2015年3期)2015-03-22 01:16:17
电机与控制应用(2015年1期)2015-03-01 03:49:10
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54