
UWB雷达抗多普勒模糊技术研究
2015-04-13 18:20陈国斌彭黎丽唐佳
现代电子技术 2015年1期
陈国斌 彭黎丽 唐佳

摘 要: 研究了一种基于频带分割的低PRF模式下的抗多普勒模糊处理方法。通过对多个通道相参积累后的结果进行合成,在保证距离不模糊的前提下,解决了速度模糊问题。仿真结果验证了算法的正确性与合理性。
关键词: 多普勒模糊; 频带分割; 速度模糊; 算法验证
中图分类号: TN957?34 文献标识码: A 文章编号: 1004?373X(2015)01?0012?03
Abstract: A method based on band segmentation to resolve Doppler ambiguity in low PRF mode is investigated in this paper. Doppler ambiguity was resolved without range ambiguity in combination with coherent integration of multiple channels. The simulation result show that the algorithm is correct and reasonable.
Keywords: Doppler ambiguity; intersection of frequency spectrum; speed ambiguity; algorithm verification
0 引 言
作为一种新体制的雷达, 超宽带(Ultra?Wide Band,UWB)雷达的研究越来越受到人们的关注。由于发射机峰值功率受硬件水平的限制, 超宽带雷达发射信号往往采用大时宽带宽积信号, 这种信号具有大的相对带宽(大于25%)和大的绝对带宽。超宽带意味着需要高采样率A/D来满足采样定律。而受到器件本身的限制,A/D的采样率很难满足大带宽要求,而即使能够满足高采样率的要求,其有效位宽往往很有限,这样就使系统的动态范围受限。因而需要采用基于频带分割的多通道雷达接收机。接收机中的多通道数据采集方法是先通过模拟滤波器组对信号进行频带分割, 在每个子带上用相对较低速率的A/D进行采样, 然后进行子带脉冲压缩或信号处理[1]。
模糊问题是脉冲多普勒雷达的固有问题。在目标的延迟时间大于发射脉冲的重复周期时,会产生距离模糊。当目标运动引起的多普勒频率大于发射脉冲的重复频率时,会产生速度模糊[2]。对高速目标来说距离和多普勒模糊会产生错误信息并会影响接下来的目标跟踪,因此如何解决脉冲多普勒雷达的模糊问题是实际应用中的一个很重要的问题。为测量高多普勒频率传统上主要采用两种方式,一种是直接设计高PRF来抗多普勒模糊,另一种就是采用多重频解参差的方法去多普勒模糊。前者直接带来的后果就是距离模糊,无法测量远距离信息。而对于后者,需要通过解参差来测量距离信息。对于具有远距离探测能力地面雷达,其发射功率巨大,使得近区杂波多趋于饱和,即使使用MTI技术也无法在近区杂波中检测出有用的目标信息。为了避免检测通道阻塞,通常的做法是舍弃近区检测数据,这样就会导致在解距离模糊时产生很大的距离盲区。
为了解决超宽带雷达在处理上带来的上述问题,本文提出了一种频率分割的处理方式。在设计中使用低PRI发射波形,使得距离上不存在模糊。在频域上分割出的多个子带,由于射频中心频率不同,对于相同的目标速度,每个子带回波携带的多普勒不一致,通过将多个子带进行速度滤波,合成后能够在对应的速度上形成惟一的峰值,有效地避免了速度模糊。
1 多普勒滤波器组
频率分割处理流程如图1所示。雷达接收到的目标回波信号通过频率分割接收机将宽带信号分割成多个子带输出。每个子带具有相同的中频中心频率和带宽,因此每个子带的处理流程可以统一设计,有效的节省设计时间,提高研发效率。
在进行相参积累将时域信号转换为多普勒域时,简单的FFT处理无法补偿掉不同子带之间多普勒频率差异。这就需要将多普勒维转换为速度维进行处理,本文提出了基于速度维多普勒滤波器组的概念。所谓的速度维多普勒滤波器组就是以速度为横坐标,建立每个通道对应的同一速度的多普勒滤波器。假设在速度维上划分[M]个等间隔点,对于具有[N]个子带的系统,就需要[M×N]个多普勒滤波器。
2 低PRF抗多普勒模糊
对于单个子带而言,低PRF意味着多普勒存在严重的模糊。当多普勒频率大于PRF时,就会以PRF为周期进行折叠,如图3所示。不同的子带由于其射频中心频率不同,所以速度的折叠周期也不同。也就是说,对于每个子带,除真实速度外其他折叠速度都不可能在同一个速度点上。图4可以很好地说明这一点。图中[V1]为子带1的速度折叠周期,[V2]为子带2的速度折叠周期。两个子带的真实值出现在一维距离像中的同一速度点上,而折叠值则分布在不同的速度点上。
3 仿真结果与分析
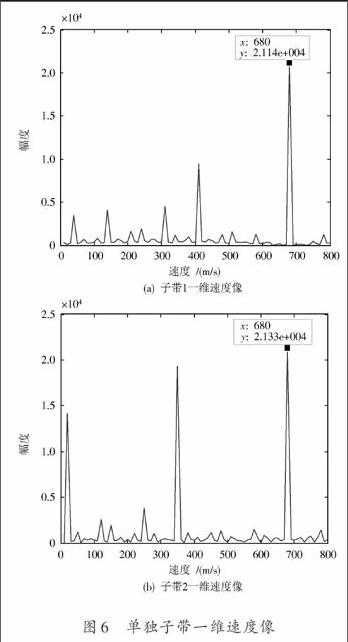
仿真采用了16个子带系统,每个子代的中心频率间隔为12.5 MHz,相参积累脉冲个数为64,目标速度为2码赫。图6为选取的某两个子带对应的一维速度像。从图中可看出,每一个子带的速度出现了多个峰值,除标注的真实速度外,其他的均为速度模糊折叠后的值。两个子带除真实速度外,其他由于折叠产生的峰值均不在同一个速度点上。
对16个子带进行速度维的合成,合成后的结果如图7所示。从图7可以看出,合成后的一维速度像在真实速度点处形成了一个惟一的峰值,即真实目标的速度值。
4 结 语
本文将频率分割以及速度滤波器组引入到超宽带雷达信号处理中。通过速度滤波器组形成每个子带一维速度像,然后进行多个子带的合成,能够很好地解决单个子带速度模糊(多普勒模糊)问题。而且该抗多普勒模糊的方法不受PRF的限制,从而很好地解决了最大模糊速度与最大模糊距离的矛盾冲突。该处理方法对超宽带雷达信号处理具有很好的参考价值。
参考文献
[1] HUSSAIN M G M. Principle of High?Resolution Radar Based on Nonsinusoidal Waves? Part Ⅱ: Generalized Ambiquity Function [J]. IEEE T?EMC, 1989, 31(4): 369?375.
[2] GERLACH K, ANDREWS G A. Cascaded detector for multiple high?PRF pulse Doppler radars [J]. IEEE Transactions on Aerospace and Electronic System s, 1990, 26(5): 754?767.
[3] 徐敏.单脉冲测量雷达测速技术研究[J].现代雷达,2005,27(1):58?61.
[4] 毛士艺,张瑞生,许伟武,等.脉冲多普勒雷达[M].北京:国防工业出版社,1990.
[5] 陈登伟,汪连栋,李永祯,等.机载脉冲多普勒雷达地杂波的相干信号仿真研究[J].现代电子技术,2006,29(10):61?64.
[6] 秦勤.对多种体制雷达多普勒干扰的研究[J].现代电子技术,2010,33(17):23?26.
