
双离合自动变速器特殊工况下换挡规律的智能在线修正研究*
2015-04-12 06:34张炳力王伦珍
汽车工程 2015年6期
张炳力,王伦珍
(合肥工业大学机械与汽车工程学院,合肥 230009)
双离合自动变速器特殊工况下换挡规律的智能在线修正研究*
张炳力,王伦珍
(合肥工业大学机械与汽车工程学院,合肥 230009)
针对某装备6挡双离合自动变速器的车辆,制定了传统两参数综合换挡规律,并分析了在该换挡规律控制下,车辆行驶在城市拥挤道路、紧急制动、加速超车、弯道和坡道等特殊工况时出现不合理换挡现象的原因。为减少不合理的换挡,综合考虑行驶环境和驾驶员意图,采用模糊控制方法,提出了基于传统两参数换挡规律的在线修正换挡规律。最后通过AMESim-Simulink联合仿真,对比了传统换挡规律和在线修正换挡规律在上述特殊工况下的控制效果,验证了在线修正换挡规律的有效性。
双离合自动变速器;换挡规律;联合仿真;AMESim; Simulink
前言
双离合器自动变速器(dual clutch transmission, DCT)是由平行轴式手动变速器发展而来,它继承了手动变速器传动效率高、安装空间紧凑和质量轻等优点,此外在换挡过程中不存在动力中断,具有良好的换挡品质[1]。换挡控制是保证换挡品质的核心技术之一,换挡规律的优劣则直接影响车辆的换挡品质。
传统的两参数或三参数换挡规律仅反映汽车的实际行驶状况,忽略了汽车行驶环境和驾驶员操作意图[2]。当汽车在城市拥挤道路、紧急制动、加速超车、弯道和坡道等特殊工况下行驶时,采用传统换挡规律容易造成频繁换挡和意外升降挡[3]。文献[4]中采用基于油门开度及其变化率的模糊控制方法对传统换挡规律进行修正,提出的智能修正换挡规律避免了平直路面的循环换挡,但忽略了坡道行驶的不正常换挡现象;文献[5]~文献[7]中建立了挡位决策的模糊专家系统,虽提高了汽车换挡的准确性,但是由于驾驶员类型、行驶环境和车辆状况可组成若干种状态,系统工作量巨大,所以很难使车辆在常规路面的性能达到最佳。
本文中综合考虑车辆行驶环境和驾驶员意图,对基于油门开度和车速的传统综合换挡规律在特殊工况下的控制效果进行分析,并采用模糊控制方法,对其换挡临界车速进行修正,从而获得适应不同行驶工况下的在线修正换挡规律。在线修正换挡规律继承了传统两参数换挡规律在良好路况的控制精确性,并可克服传统换挡规律在特殊工况下不合理换挡的缺陷。为充分考虑整车动力学模型的物理精确性和控制系统模型的实时性,对该换挡规律进行了Simulink-AMESim联合仿真研究。
1 传统综合换挡规律
1.1 传统综合换挡规律的制定
以油门开度和车速作为控制参数,分别根据发动机燃油消耗率特性和发动机部分负荷特性曲线,制定适合小油门开度下的经济性升挡曲线和适合大油门开度下的动力性升挡曲线。以经济性和动力性升挡曲线为基础制定适合所有油门开度下的综合升挡曲线。降挡曲线的制定中,选取组合型换挡延迟,小油门开度时,选取较大的换挡延迟,在保证动力性的同时改善燃油经济性;而较大油门开度时,选取较小的换挡延迟,使车辆获得更好的动力性。图1为制定的综合换挡规律。
1.2 特殊工况下采用传统综合换挡规律时的不合理换挡现象
(1) 城市拥挤道路工况
车辆行驶在城市拥挤道路工况下,由于路况复杂,驾驶员须频繁改变油门开度,但是短时间内频繁改变油门开度,在惯性作用下车速不能及时做出相应的改变,往往会出现油门加大或减小而车速保持不变的状况,如图2中de+ef+fg+gh线段。由图2可见,车辆在2挡和3挡间反复变化。
(2) 快速超车工况
车辆须要超越前方车辆时,油门开度由某一数值迅速增加到较大数值。油门、车速的理想变化应如图2中jl线段那样,升高挡超车。但实际行驶过程中,驾驶员迅速加大油门,而车辆由于惯性提速滞后,油门、车速的实际变化过程如图2中jk+kl线段,即车辆会出现4-3-4-5换挡的不合理现象。
(3) 下坡、弯道或紧急制动工况
车辆遇到下坡、弯道或紧急制动减速时,油门开度由某一数值迅速降到零,开始制动,油门、车速的理想变化应如图2中ac线段,车辆保持原挡位行驶。但实际行驶过程中,驾驶员快速松开油门,油门开度快速减到零,车速由于惯性未发生大的改变,直到驾驶员踩下制动踏板,车速开始减小,变化过程如图2中ab+bc线段。由图2可见,车辆必然出现4-5-6-5-4挡的不合理换挡现象。车辆紧急制动停车情况类似,只是车速从c点移动到0位置,挡位变化为4-5-6-5-4-3-2-1。类似地,转弯工况如图2中or线段和op+pq+qr线段,车辆出现3-4-5-4-3-2挡的意外升挡现象。
2 在线修正换挡规律
2.1 在线修正换挡规律控制策略
由上述分析可知传统换挡规律下,车辆在城市拥挤道路、紧急制动、加速超车、弯道和坡道等特殊工况时会出现不合理换挡,其主要原因是由于油门-车速的不对应变化(车速未随油门变化而及时、相应地改变)。现采用模糊控制方法,模糊控制器对当前油门、车速进行实时跟踪,并根据模糊规则判断当前油门、车速的变化情况。油门-车速呈对应变化时,模糊控制器输出换挡修正因子值为0.5,经增益(×2)保持传统换挡规律的换挡临界速度;油门-车速呈不对应变化(特殊工况)时,模糊控制器输出换挡修正因子不等于0.5的值,增益(×2)后实时改变传统换挡规律的换挡临界速度,从而实现对传统换挡规律的在线修正,保证输出挡位的合理性。
以图2中下坡和快速超车工况为例说明其控制原理。下坡ab段,油门减小较快,车速变化率趋近于0,通过模糊控制输出升挡修正因子,增大升挡临界车速,即可以有效避免升挡;bc段,油门很小且不变化,车速快速减小,同样方法抑制升挡;达到c点后,油门、车速变化稳定,模糊控制器输出的换挡修正因子不改变原换挡规律。快速超车jk段,油门迅速增加、车速变化很小,模糊控制器输出降挡修正因子,减小降挡临界车速,则可避免车辆降挡;kl段,油门较大且不变化,车速迅速增大,同样方法抑制降挡;达到l点后,油门、车速变化稳定。其他工况控制原理相同。
图3为换挡规律在线修正的控制框图,g表示当前挡位,v为车速,a表示油门开度,da表示油门开度变化率,dv表示车速变化率,u+、u-分别表示升、降挡临界车速修正因子,vi+1、vi-1分别表示升降挡临界车速。
2.2 换挡模糊控制器设计
2.2.1 输入、输出变量及其隶属函数
采用三输入、两输出的Sugeno型模糊控制器,以反映驾驶员意图的油门开度a及其变化率da和反映车辆行驶状况的车速变化率dv作为实时输入,模糊控制器迅速作出反应,输出升、降挡临界车速修正因子u+、u-(由于Sugeno型的输出只能是0~1之间的数值,故在输出后乘增益2以得到0~2之间的数,用于提高、保持或降低换挡临界车速)。修正因子u+≥0.5时,保持或提高升挡临界车速;修正因子u-≤0.5时,保持或降低降挡临界车速。
各变量的语言集如下:
油门开度大小a:{S(小)、M(中)、B(大)},[0 100];
油门开度变化率da:{NB(负大)、NS(负小)、Z(零)、PS(正小)、PB(正大)},[-60 60];
实际车速变化率dv:{NB(负大)、Z(零)、PB(正大)},[-30 30];
升挡修正因子u+:{M(0.5)、B(0.65)、VB(1)};
降挡修正因子u-:{VS(0.1),S(0.4),M(0.5)}。
依据专家经验和仿真结果的反馈信息不断进行修正,确定三角形函数、Z函数和S函数相结合的隶属度函数,图4为各输入变量隶属度函数。
2.2.2 模糊规则的建立
根据专家经验和实验修正,得到换挡修正因子的控制规则见表1。
3 系统仿真模型的建立
目前对于双离合器自动变速器传动系统的动力学建模和仿真分析普遍采用Matlab/Simulink工具,它的特点是基于数学方程级的建模方式有着很高的精度,而且具有强大的控制系统设计功能,但是对于复杂非线性系统的建模存在着模型简化和精度之间的矛盾。而AMESim是一款图形化的开发平台,且提供了多学科领域的各种模型库,适用于工程系统的建模、仿真和在线分析[8]。同时AMESim提供了点对点的AMESim-Simulink接口,为AMESim的被控对象模型和Simulink控制系统模型之间的耦合分析提供了一个使用便捷和行之有效的工具。通过简单的模型交换,避免了不同平台间复杂模型的重建,最大程度地发挥了两个软件的最佳功能。
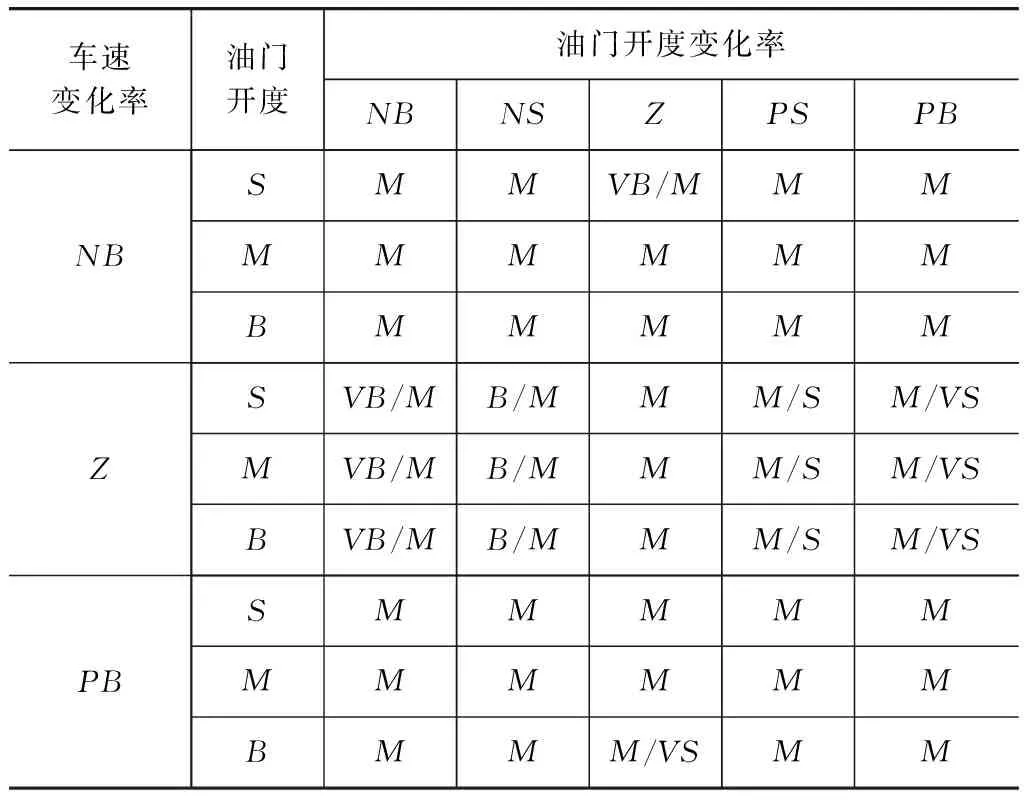
表1 换挡修正因子的模糊规则表
注:M表示升降挡修正均输出为M,VB/M表示升挡修正因子为VB,降挡修正因子为M,依此类推。
3.1 AMESim整车动力学模型
基于AMESim建立的6挡DCT车辆动态仿真模型主要包括发动机模块、离合器模块、同步器模块、传动轴模块、机械齿轮模块、轮胎-悬架-车身模块和Simulink接口模块等多种元件模型。
在AMESim中创建AMESim-Simulink接口模块,定义实际车速、期望油门开度和期望制动踏板行程为接口模块的输入信号,挡位输出信号、同步器控制信号、离合器控制信号等为接口模块的输出信号。
3.2 Simulink换挡控制模型
在Simulink环境下,建立换挡控制仿真模型,主要包括挡位输出模块、同步器控制模块、行驶工况选择模块、起步控制模块(由于只研究换挡过程控制,故起步选择始终设置为1,即从1挡开始运行)和接口模块(S-function函数)等。S-function函数接收来自AMESim的输出信号:实际车速、期望车速和期望制动,并将上述信号反馈到Simulink控制端口,作为挡位变化判断、同步器动作控制的实时输入;同时S-function函数将挡位输出等控制信号传递给AMESim,以控制AMESim中的对应模块。通过上述输入、输出信号的相互交换,从而实现了AMESim和Simulink无缝连接。
4 特殊工况的联合仿真分析
4.1 城市拥挤道路工况
图5为传统换挡规律城市拥挤道路工况(选取UDDS工况前500s段)的仿真结果。由图可见:200s左右油门频繁变化,而车速变化不明显,挡位在3挡和4挡之间连续跳动多次;类似情况同样出现在第415s和455s附近。
图6为在线修正换挡规律城市拥挤道路工况的仿真结果。由图可见:200s左右油门开度变化率大,车速变化率较小,模糊控制器输出经增益后不等于1的升、降挡车速修正因子,升挡修正因子增大升挡临界车速、降挡修正因子减小降挡临界车速,车辆保持在4挡运行;415和455s左右情况类似,模糊控制器使车辆保持4挡行驶,未出现意外换挡;其他时间段油门-车速呈对应变化,模糊控制器输出升、降挡修正因子经增益后为1,沿袭传统换挡规律,挡位变化与图5相同。
4.2 “快速超车+弯道”工况
图7为传统换挡规律“快速超车+转弯”工况仿真结果。由图可见:车辆在97s时准备超车,油门迅速增加,车辆提速滞后,挡位由4挡降至3挡后升到5挡;在194s时超车完成,油门减小,车速减小迟滞,挡位由5挡升为6挡后降到4挡;在295s时车辆准备转弯,油门开度快速降为0,车辆降速延迟,挡位由4挡升到5挡后降至3挡;在366s时车辆急起步,车速变化小,挡位由4挡降3挡后升4挡。
图8为在线修正换挡规律“快速超车+转弯”工况下仿真结果。由图可见:在97s时超车时油门开度增大,车速变化不明显,模糊控制器输出经增益后小于1的降挡修正因子,减小降挡临界车速从而抑制降挡,使车辆保持5挡行驶;在194和295s时油门开度快速减小,车速变化延迟,模糊控制器输出经增益后大于1的升挡修正因子,抑制车辆升挡,车辆直接降挡行驶;在366s时油门开度增大,车速变化不明显,升挡修正因子经增益后小于1抑制降挡。
4.3 “坡道+紧急制动”工况
图9为传统换挡规律“坡道+紧急制动”工况仿真结果。由图可见:车辆在40s时遇到上坡,油门开度缓缓增大,车速下降,降至1挡上坡;100s时上坡结束,油门开度减小,车速升高,挡位顺序升至5挡;196s时开始下坡,油门开度迅速降为0,车速下降延迟,挡位于198s时升为6挡然后降到5挡下坡;300s时下坡结束,油门开度迅速增大,车辆降至3挡后升4挡行驶;365s时汽车紧急制动,挡位迅速升至6挡后顺序降至1挡。
图10为在线修正换挡规律“坡道+紧急制动”
工况的仿真结果。由图可见:196s时车辆下坡,油门开度迅速增大,车速基本不变,模糊控制器输出经增益后大于1的升挡修正因子,抑制车辆升挡,车辆保持5挡行驶;300s时下坡结束,油门增大,车速缓慢上升,模糊控制器输出经增益后小于1的降挡修正因子,抑制车辆降挡;365s时油门开度锐减,车速下降延迟,升挡修正因子经增益后大于1,意外升挡得到抑制,车辆正常挡位行驶。
5 结论
(1) 基于传统换挡规律,综合考虑车辆行驶环境和驾驶员意图,采用模糊控制方法输出换挡临界车速修正因子,改变换挡临界车速。此控制策略实现了对传统换挡规律的实时修正。
(2) 采用AMESim-Simulink联合仿真方法,可较真实地反映DCT车辆动力学特性和换挡控制系统的准确性,实现了对换挡控制策略的有效验证。
(3) AMESim-Simulink联合仿真结果表明,在线修正换挡规律可有效改善传统换挡规律在城市拥挤道路、紧急制动、加速超车、弯道和坡道等特殊工况下的不合理换挡现象。对提高变速器寿命、改善汽车乘坐舒适性有积极作用。
[1] 张炳力,赵韩,金朝勇,等.汽车自动变速器研究现状与展望[J].中国机械工程,2006,17(S2):417-420.
[2] 陈清洪,秦大同,叶心.AMT汽车动态模糊神经网络三参数换挡策略研究[J].汽车工程,2010,32(6):505-509.
[3] Bastian A. Handling the Nonlinearity of a Fuzzy Logic Controller at the Transition Between Rules[J]. Fuzzy Sets and System,1995,71(3):369-387.
[4] 杨伟斌,陈全世,吴光强,等.智能修正型换挡规律的设计及在双离合器式自动变速器中的应用[J].机械工程学报,2009,45(1):205-210.
[5] Liu Yonggang, Qin Datong, Jiang Hong, et al. Shift Schedule Optimization for Dual Clutch Transmissions[C]. Proceedings of Vehicle Power and Propulsion Conference,2009:1071-1078.
[6] Qin Guihe, Ge Anlin, Zhang Hongkun. Considering Driver’s Intentions and Road Situation in AMT Gear Position Decision[C]. Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics,2001:1361-1365.
[7] 刘振军,胡建军,等.模糊神经网络的自动变速汽车换挡规律分析[J].重庆大学学报,2009,32(8):897-903.
[8] Kim S, Park K, Song H J, et al. Development of Control Logic for Hydraulic Active Roll Control System[J]. International Journal of Automotive Technology,2012,13(1):87-95.
A Research on the Online Intelligent Correction of Shift Schedule forDual-clutch Transmissions Under Special Working Conditions
Zhang Bingli & Wang Lunzhen
SchoolofMachineryandAutomobileEngineering,HefeiUniversityofTechnology,Hefei230009
A traditional two-parameter comprehensive shift schedule is worked out for a car with six-gear dual clutch transmission, and the causes of unreasonable shifting happened with that shift schedule in special conditions, such as urban congestion roads, emergency braking, accelerated overtaking, curved road and ramp are analyzed. For avoiding or reducing unreasonable shifting with concurrent consideration of driving environment and driver's intension, an online corrected shift schedule based on two-parameter comprehensive shift schedule is proposed by using fuzzy control method. Finally through an AMESim-Simulink co-simulation, the control effects with both traditional comprehensive shift schedule and online corrected shift schedule under above-mentioned special conditions are compared, verifying the effectiveness of online corrected shift schedule proposed.
DCT; shift schedule; co-simulation; AMESim; Simulink
*安徽省自然科学基金(1308085ME64)、安徽省科技攻关项目(12010202039)、广东省产学研项目(2012B091100310)和安徽高校省级自然科学研究项目(KJ2012A225)资助。
原稿收到日期为2012年11月5日,修改稿收到日期为2014年1月21日。
猜你喜欢
汽车实用技术(2021年12期)2021-07-03
科学与财富(2021年33期)2021-05-10
北京汽车(2021年2期)2021-05-07
岷峨诗稿(2020年4期)2020-11-18
发电技术(2020年3期)2020-06-29
汽车维护与修理(2019年4期)2019-03-07
戏剧之家(2018年21期)2018-10-19
汽车电器(2018年8期)2018-08-25
汽车维修技师(2017年6期)2017-11-18
汽车之友(2016年10期)2016-05-16
