
基于贝叶斯网络的信息融合汽车网络故障诊断方法*
2015-04-12 09:27李宏梅佟为明程树康
汽车工程 2015年10期
李宏梅,佟为明,程树康
(1.哈尔滨工业大学电气工程及自动化学院,哈尔滨 150001; 2.航天科技控股集团股份有限公司,哈尔滨 150060)
2015203
基于贝叶斯网络的信息融合汽车网络故障诊断方法*
李宏梅1,2,佟为明1,程树康1
(1.哈尔滨工业大学电气工程及自动化学院,哈尔滨 150001; 2.航天科技控股集团股份有限公司,哈尔滨 150060)
本文中基于贝叶斯网络的信息融合,开展汽车网络故障诊断方法的研究。首先分析了汽车网络系统的故障类型;其次,针对其故障具有随机性和不确定性的特点,在分析了相关故障诊断方法的基础上,提出了基于贝叶斯网络的信息融合故障诊断方法;最后,结合专家知识和大量统计数据,将所提出的故障诊断方法应用在汽车发动机节点的故障诊断中,证实了该方法有效性。
汽车网络;故障诊断;贝叶斯网络;信息融合
前言
伴随着新的总线形式和相关标准的推出,汽车网络已成为现代汽车的重要组成部分和发展方向。但由于汽车的使用环境十分复杂,例如:在发电机、电动机和点火系统等装置启动和运行时,会产生很强的电磁干扰和电冲击干扰;另外,汽车使用环境温度变化范围大,包括最热的沙漠和最寒冷的高原地区等,这些复杂的因素使汽车网络在使用过程中难免发生故障。当汽车网络发生故障时,如果不能及时确定具体的故障点、准确地诊断出故障原因、排除故障,汽车网络就会因微小的故障导致全系统性能恶化,严重时可引发整车灾难性的事故。因此确保汽车网络具备快速诊断能力,对汽车的高效维护和安全运行具有十分重要的意义。
1 汽车网络故障的类型与特征
1.1 汽车网络故障类型
根据汽车网络的结构,总体上说,汽车网络故障可分为两大类:一类是信息传输系统故障,另一类是网络节点自身故障。故障发生时可导致汽车网络系统整体失效或部分功能失效。
关于信息传输系统故障诊断等问题,文献[1]中给出了详细介绍,本文中将集中研究网络节点自身故障的诊断问题。
汽车网络系统包括多个网络节点,网络节点可以是实时监测被控对象状态的传感器、驱动被控对象动作的执行器,也可以是分析、运算和处理数据,并发出控制信号的控制器。一般情况下,汽车网络节点集中了传感器、执行器和控制器的部分或全部功能,个别网络节点同时担负着网关的重任。
汽车网络节点故障主要有:软件故障和硬件故障。软件故障一般是设计程序存在问题,或/和通信协议自身存在设计方面的缺陷;硬件故障通常是MCU和外围电路损坏、汽车电源系统不稳定导致电源处理电路无法正常供电、总线收发器受损、输入电路故障、执行机构不动作或错误动作等。
1.2 汽车网络节点故障特征
作为现代汽车重要组成部分的汽车网络,在为多个ECU节点之间相互连接、协调工作和信息共享创造必要条件的同时,其网络节点规模和复杂性也在不断扩大与提高。汽车网络节点作为一种复杂电子系统,其故障一般具有如下特征[2-3]:
(1) 层次性 汽车网络系统的各网络节点在结构上可以划分为系统、子系统、部件和元件等多个层次。网络节点的故障征兆和故障原因也因此具有不同的层次性。低层次故障可能引发高层次故障。
(2) 相关性 汽车网络系统包括多个子网网络,各子网网络之间通过网关进行互联。这使汽车网络节点的任何一个原发故障都存在多条潜在的传播途径,使故障通过网络传递到其它节点上,这样就会导致其它节点工作出现异常。同时,由于网络节点功能单元很多,各单元之间相互依存和相互影响,致使故障征兆和故障原因之间对应关系不易明确判断。以汽车网络中的仪表节点为例,某一故障征兆可能对应若干故障原因,同一种故障原因又可能引起多个故障征兆,如图1所示。
(3) 不确定性 由于汽车网络节点(如发动机ECU等)均具有复杂的结构,使汽车网络节点故障经常表现为随机性和不确定性。导致汽车网络节点故障不确定性的因素有多种,主要有以下3类:诊断对象的复杂性、检测设备的局限性和知识表达的不精确性。当汽车网络节点表现出某一故障征兆时,很可能是从一种故障向另一种故障的过渡或是多种故障并存的结果,很难确切地判断出故障发生的真正原因。因此,不确定性是汽车网络节点故障诊断面临的一个关键问题,汽车网络节点的故障诊断过程实际上是一个不确定性问题的求解过程。
2 相关汽车网络节点故障诊断方法
汽车网络节点故障诊断一直是国内外专家学者和工程技术人员密切关注的研究课题。基于模型的诊断方法,能够在建立网络系统精确模型的情况下,得到令人满意的诊断结果[4-9],但在实际应用中,精确的网络模型常常难以构建。对于网络节点发动机的故障诊断,有研究人员提出了基于神经网络的信息融合故障诊断方法,如文献[10]中根据发动机故障诊断的实际需求,建立了基于声强知识和神经网络融合的发动机故障诊断模型,实现了对某型发动机的在线诊断,但这种诊断方法在故障样本关键信息缺少的情况下,其故障诊断范围和准确性过低。文献[11]中提出了一种基于模糊神经网络的车用发动机故障诊断专家系统,但所做工作大多为非常基本的或是探索性的,还须进行大量的完善工作和进一步的研究。
由于汽车网络故障具有层次性、相关性和不确定性,汽车网络节点发生故障时,只采用单一方面的信息反映网络节点的状态行为是不够的,必须融合来自多方面的多源信息,才能进行更可靠而准确的诊断。例如,发动机ECU节点工作过程中的一些传感器信息从不同层面反映了发动机的运行情况,如图2所示。
随着获取信息的不断增多,在进行发动机输出功率降低的故障诊断时,为提高诊断结果的置信度和故障诊断的准确率,采用信息融合技术是合理的选择,以便充分利用多源信息进行有效诊断。
另外,由于汽车网络的复杂性和测试手段的局限性,使汽车网络故障诊断时,不确定性问题占多数。贝叶斯网络作为一种不确定性知识的表示形式和方法,可用来描述事物之间的因果关系或依赖关系,在解决复杂设备由不确定性和关联性引起的故障诊断等方面,具有很大的优势,被认为是当今不确定知识表达和推理领域最有效的理论模型[12-14]。目前贝叶斯网络已成为故障诊断领域的研究热点,在多个领域中获得了广泛关注,特别是在电力系统变压器故障诊断等方面得到了深入研究并取得了较好的效果[15]。
本文中针对汽车网络节点的故障特征,提出了基于贝叶斯网络的信息融合故障诊断方法;进一步结合专家知识和大量统计数据,将所提出的故障诊断方法应用到汽车发动机节点故障诊断中,证实了该方法的有效性。
3 贝叶斯网络信息融合故障诊断
汽车网络节点故障诊断以信息融合技术为基础,针对信息融合结构进行数据预处理和贝叶斯网络的推理与构建,最终达到由故障征兆推理出故障原因的目的。
3.1 贝叶斯网络信息融合故障诊断方法
基于贝叶斯网络信息融合的故障诊断方法以概率推理为基础。首先采用多个传感器获取研究对象故障的多源信息,使用信息融合的贝叶斯参数估计算法对多源信息进行融合;其次构建诊断贝叶斯网络(DBN),将研究对象的故障诊断转化为贝叶斯网络推理;最后通过极大后验概率判定逻辑对故障进行识别,完成故障诊断过程。
用类别变量F1,F2,…,Fn表示所有可能的n种状态信息(故障类型),用属性变量O1,O2,…,Om表示m个传感器各自对研究对象的属性说明(故障征兆)。本文中提出的基于贝叶斯网络信息融合故障诊断方法的主要步骤如下:
(1) 对来自各类传感器的多源信息进行预处理;确定各种故障类型和故障征兆与网络节点之间的对应关系,确定变量的所有可能取值。
(2) 将各变量按一定原则进行排序,建立一个表征条件独立的有向无环图;故障类型节点与故障征兆节点通过有向边建立条件依赖关系。
(3) 通过主观指派或客观学习确定节点的概率分布参数Θ。各故障类型的先验概率用P(Fi),i=1,2,…,n表示;m个传感器关于研究对象故障征兆的条件概率用P(Oj|Fi),j=1,2,…,m;i=1,2,…,n表示。
(4) 利用故障样本数据,通过故障诊断模型计算研究对象属性的融合概率(后验概率):
(1)
式中O=[O1,O2,…,Om]为故障样本。
(5) 故障判定。根据极大后验概率判定逻辑,选择后验概率P(Fi|O)最大的故障类型Fi作为诊断判定结果。即当P(Fi|O)=max{P(Fi|O)}时,判定故障征兆由故障类型Fi引起。
3.2 汽车发动机节点DBN模型的构建
汽车网络发动机节点的结构非常复杂。电控发动机节点一般由各种传感器、ECU和执行机构等部分组成。通过传感器采集发动机冷却液温度、发动机转速、进气歧管压力和大气压力等信号并输入ECU,由ECU对各类数据信息进行融合计算,发出控制指令给喷油泵等,使发动机在各种工况下达到最佳性能。
本文中对配装康明斯ISDe发动机的某型客车网络进行了深入研究(该客车网络数据通信采用J1939协议,发动机ECU控制模块采用Motorola的CM2150),总结出发动机常见的故障征兆为无法起动、运转粗暴、输出功率降低和冒白烟,由各类传感器等导致电控发动机异常的原因如表1所示。
从降低网络复杂度和提高计算速度两方面考虑,构建了由各类传感器等导致电控发动机故障的贝叶斯网络如图3所示。
图3中,O1~O4表示故障征兆;F1~F12表示故障类型。发动机故障征兆节点的具体定义如下:O1为不能起动;O2为功率下降;O3为冒白烟;O4为运转粗暴。故障类型节点的具体定义如下:F1为ECU故障;F2为进气歧管压力传感器故障;F3为加速踏板或操纵杆位置传感器故障;F4为机油油道压力过低;F5为冷却液温度过高;F6为进气歧管温度过高;F7为冷却液液面过低;F8为大气压力超出规定范围;F9为转速超出保护极限;F10为燃油泵执行器故障;F11为汽缸喷油器电磁阀故障;F12为燃油含水指示器故障。从图3中可以看出,由于电控发动机故障的复杂性和不确定性,当某一故障征兆出现时,很可能是多种故障并存的结果。
本文中将各传感器的工作状态分为正常与故障两种情况,可更加直观地分析和确定节点概率分布参数Θ。根据专家知识并结合汽车厂大量的维修和测试记录,对各类故障出现的概率进行统计,确定各故障类型节点的先验概率如表2所示。网络模型子节点O2在单一传感器发生故障时,发动机功率下降的条件概率P(O2|Fi)如表3所示。其余子节点O1,O3和O4的条件概率值可以按同样的方法获得。
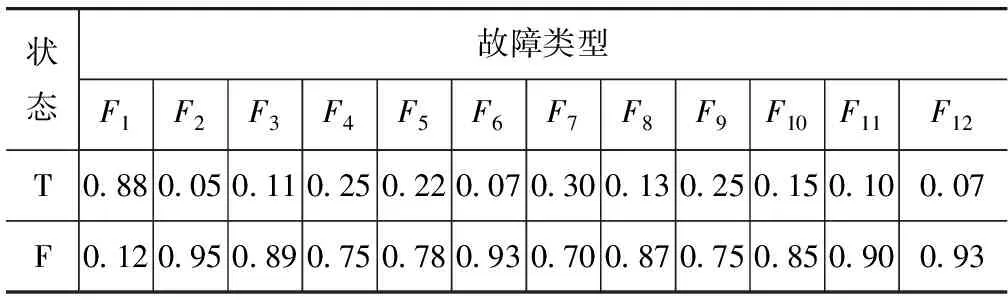
表2 各类故障的先验概率
注:T表示正常(无故障);F表示有故障。

表3 节点O2的条件概率
3.3 诊断贝叶斯网络的分析评估
采用两种方法对所建的DBN模型进行分析评估:一种为基于Gibbs抽样的诊断模型评估算法,此算法通过仿真由系统自身产生测试案例;另一种为基于标准案例的评估算法。
(1) 基于Gibbs抽样的诊断模型评估算法
步骤1:采用单故障模式对给定节点Fj等概率注入故障,用贝叶斯推理算法计算Oi的后验概率分布:
(2)
式中‖O‖为节点Oi的数量。
对计算出的概率分布进行Gibbs抽样,预测在节点Fj故障的情况下,Oi最可能的状态。Gibbs抽样规则为
(3)
式中‖F‖为节点Fj的数量。
步骤2:根据步骤1抽样得到的节点Oi状态,计算所有节点Fj的后验概率(不仅仅是步骤1选择的节点),具体算法为
(4)
步骤3:对于指定的每个节点故障迭代运行100次,计算节点后验概率的平均值。该模型的评估结果采用表格输出的形式,模型故障隔离率为100%,平均后验概率如表4所示。
(2) 基于标准案例的评估算法
表5为从汽车厂收集到的实际故障样本。
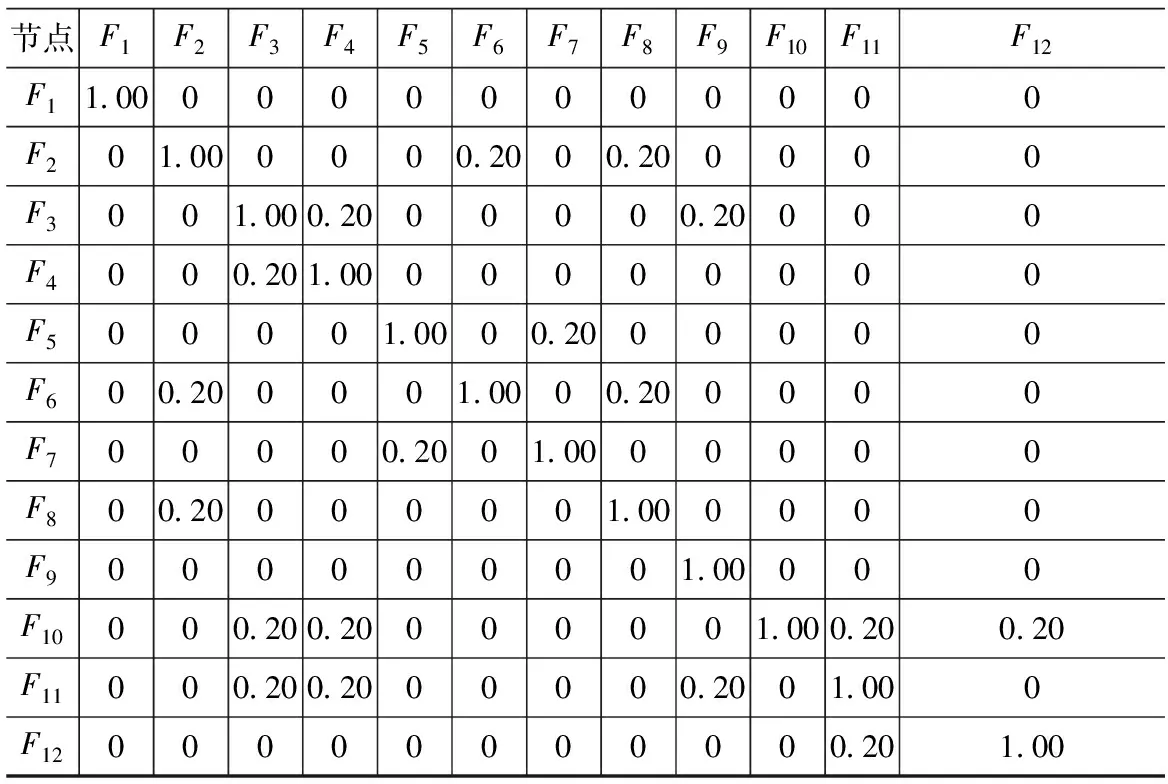
表4 节点Fj故障的平均后验概率
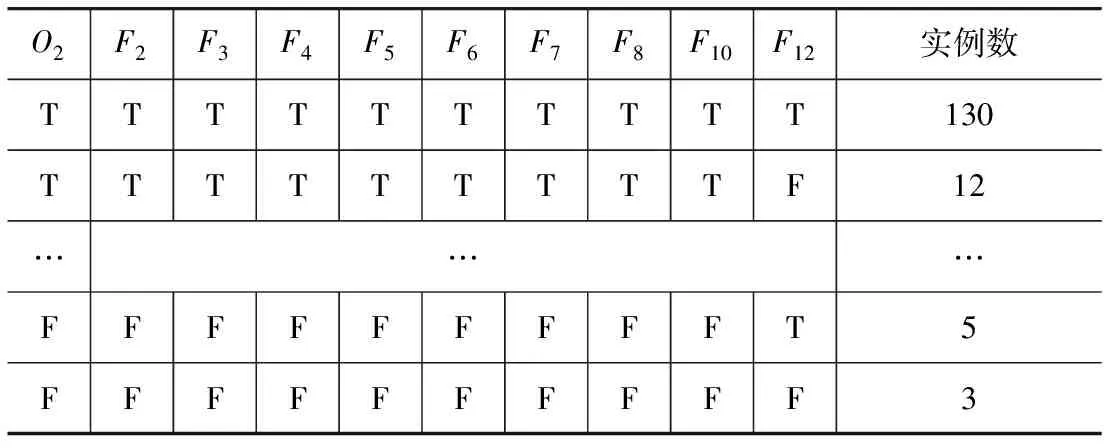
表5 故障实例采样统计
故障样本包括单故障和多故障两种模式,单故障模式是指系统故障仅由一种原因引起,多故障模式是指系统故障由多种原因引起。诊断模型评估的基础是单故障模式,只有单故障均能通过一系列Oi状态集确定的情况下,多故障才能通过Oi进行隔离。
本文中将收集到的200例故障样本作为训练集对网络进行训练,然后将另外70例故障样本作为测试样本,包括60例单一故障样本和10例多故障样本。其中60例单一故障样本中诊断结果正确率为98%,10例多故障样本中诊断出所有故障的有3例,至少诊断出一种故障的有7例。
以故障样本O1=T,O2=F,O3=T,O4=T为例,通过将故障征兆作为证据输入该诊断模型,得出该样本各种故障发生的概率,故障类F2存在的概率为0.416 2,满足P(F2|O)=max{P(Fi|O)},因此判定为进气歧管压力传感器发生故障,实际情况是进气歧管压力传感器温度超出发动机保护临界极限。
4 结论
结果表明,所设计的贝叶斯网络诊断模型对发生单一故障的电控发动机节点诊断正确率很高,对同时发生多种故障的电控发动机节点诊断还须进行网络结构学习并进一步深入研究。汽车网络节点故障诊断是一个非常复杂的过程,信息融合可为网络节点故障诊断提供更多的信息,本文中探索了将贝叶斯信息融合方法用于汽车网络节点的故障诊断,从理论分析和仿真研究可以看出,基于贝叶斯信息融合的故障诊断是一种行之有效的方法。
[1] Li Hongmei, Tong Weiming, Cheng Shukang. Vehicle Network System Communication Error Detection[C]. Third International Conference on Information Science and Technology,2013,3:1081-1084.
[2] Wang Zhongsheng, et al. Intelligent Fault-tolerant Management of Electromechanical Equipment[J]. International Journal of Plant Engineering and Management,1997,2(3):112-116.
[3] 李伟.复杂系统的智能故障诊断技术现状及其发展趋势[J].计算机仿真,2004,21(10):4-7.
[4] Lü Ming, Wu Xiaobei, Chen Qingwei, et al. Fault Detection for Networked Control Systems with Multi-packet Transmission Based on Scheduling[J]. Journal of Computational Information Systems,2007,3(3):1257-1263.
[5] 黄鹤,韩笑冬,王执铨.有时延和数据包丢失的网络控制系统故障检测[J].南京理工大学学报(自然科学版),2008,32(4):387-392.
[6] 郑英,胡修林,方华京.基于观测器的网络化控制系统故障诊断方法[J].系统工程与电子技术,2005(6):1069-1072.
[7] 谢林柏,纪志成,方华京.具有异步时延的网络化控制系统故障检测[J].系统仿真学报,2005,17(11):2717-2720.
[8] 刘云霞,钟麦英.基于等价空间的网络控制系统故障检测问题研究[J].系统工程与电子技术,2006,28(10):1553-1555.
[9] Zhang P, Ding S X, Frank P M, et al. Fault Detection of Networked Control Systems with Missing Measurements[C]. Control Conference,5th Asian,2004,2:1258-1263.
[10] 魏少华,陈效华,常思勤.基于声强与神经网络技术的发动机故障诊断[J].汽车工程,2006,28(4):401-404.
[11] 李国勇,杨庆佛.基于模糊神经网络的车用发动机智能故障诊断系统[J].系统仿真学报,2007,19(5):1034-1037.
[12] 姜万录,刘思远.多特征信息融合的贝叶斯网络故障诊断方法研究[J].中国机械工程,2010,21(8):940-945.
[13] 吴欣,郭创新.基于贝叶斯网络的电力系统故障诊断方法[J].电力系统及其自动化学报,2005,17(4):11-15.
[14] 朱刚,周政新,马良.基于贝叶斯网络的电机智能诊断技术研究[J].微计算机信息,2006,22(1-1):166-168.
[15] 吴立增,朱永利,苑津莎.基于贝叶斯网络分类器的变压器综合故障诊断方法[J].电工技术学报,2005,20(4):45-51.
Fault Diagnosis Method of Automotive Network withBayesian Network-based Information Fusion
Li Hongmei1,2, Tong Weiming1& Cheng Shukang1
1.SchoolofElectricalEngineeringandAutomation,HarbinInstituteofTechnology,Harbin150001; 2.AerospaceHi-TechHoldingGroupCo.,Ltd.,Harbin150060
Based on the information fusion of Bayesian network, the fault diagnosis method of vehicle network is studied in this paper. Firstly, the fault types of vehicle network system are analyzed. Then, according to the randomness and uncertainty features of faults, a fault diagnosis method with information fusion based on Bayesian network is proposed after analyzing relevant fault diagnosis methods. Finally, combined with expert knowledge and massive statistical data, the fault diagnosis method proposed is applied to the fault diagnosis of automotive engine nodes, validating the effectiveness of the method proposed.
automotive network; fault diagnosis; Bayesian network; information fusion
*国家自然科学基金(51377030)资助。
原稿收到日期为2014年9月17日,修改稿收到日期为2014年11月16日。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
世界科学技术-中医药现代化(2022年3期)2022-08-22
舰船科学技术(2022年11期)2022-07-15
一重技术(2021年5期)2022-01-18
计算机应用与软件(2021年10期)2021-10-15
法律方法(2021年4期)2021-03-16
法律方法(2021年4期)2021-03-16
小型微型计算机系统(2020年5期)2020-05-14
计算机与生活(2020年5期)2020-05-13
火力与指挥控制(2020年1期)2020-03-27
