海上航船分布及其对海洋环境噪声的影响*
2015-04-10 05:45:27衣雪娟林建恒孙军平江鹏飞蒋东阁蒋国健
海洋与湖沼 2015年6期
衣雪娟 林建恒, 孙军平 江鹏飞 蒋东阁 蒋国健
(1.中国科学院声学研究所北海研究站 青岛 266023;2.中国科学院水声环境特性重点实验室 北京 100190)
海洋环境噪声的研究始于二战期间,Knudsen等(1948)给出了Knudsen谱曲线,战后Wenz(1962)进一步提出了经典的海洋环境噪声Wenz谱曲线,目前仍是水声工程设计经常采用的参考曲线。历经几十年,海洋环境噪声特性已经发生了很大变化,海洋环境噪声级的统计平均值已明显上升,这其中有人为因素和自然因素的影响: 人为因素主要包括海上航船、海上石油钻探和各种军用声呐装置的使用等,自然因素包括气候变化、海底地震等。
近几十年来,航运量快速增长导致海洋环境噪声级大幅升高,海洋环境的噪声污染增加,在西太平洋海域以及亚欧、亚美等主要航道附近尤其显著。美国国家海洋和大气管理局提供的统计资料(Frisk,2004)表明,1950年全世界范围内商船(包括油轮、货船、集装箱船以及其它大型海运船只)大约3万艘,约850万总吨,而1998年商船总数超过了8.5万艘,约5250万总吨,并预见在未来的 20—30年,在世界范围内大船的数量仍有可能成倍增加。
Ross(2005)整理发表了对 1950—1975年由航船引起低频海洋环境噪声变化所做的详细分析,认为在这25年间低频海洋环境噪声级已升高了10dB甚至更高,这种趋势在当时的东太平洋和东、西大西洋最为明显,乃因这些海域通商航运增长所致。Ross根据测量数据绘出了不同海区50Hz海洋环境噪声谱级变化曲线及趋势,如图1所示。

图1 不同海区50Hz噪声谱级Fig.1 Noise spectrum level at 50Hz in different areas
Andrew等(2002)对比了美国加利福尼亚中部海域1994—2001年与1963—1965年的海洋环境噪声测量数据,发现近30年来10—80Hz和200—300Hz的噪声级升高约 10dB,100Hz的噪声级升高约 3dB。McDonald等(2006)的环境噪声测量数据对比显示,圣尼古拉斯岛2003—2004年的30—50Hz环境噪声级比1964—1966年增加了10—12dB,100—300Hz之间环境噪声级增长了1—3dB。McDonald等(2008)的浅海环境噪声数据显示,2005—2006年圣克莱蒙特岛附近存在航船时的噪声级中值数要比无航船时高6—9dB。Miksis-Olds等(2013)对比了印度洋2002—2012年的环境噪声数据,发现 85—105Hz环境噪声级明显增高。
另外值得关注的是,在航船数据库方面,国外已掌握了历年全球重要海域的航船密度数据,例如著名的历史船只数据库 HITS(Historical Temporal Shipping),其中就包含了我国近海的航船密度数据(Breeding et al,1996)。
低频海洋环境噪声是影响水下远程声探测性能的关键因素,当代水下探测向低频远程发展,人们更加关注海洋环境噪声的低频段特性。航船噪声是海洋中的主要低频噪声源,本文依据港口进出航船信息和船舶自动识别技术数据库资料,对一段时期内我国某港口和某海域的历史航船分布数据进行分析,侧重讨论开阔海域单位面积单位时间进、出港的航船数分布,在此基础上,针对某开阔海域某时间段航船分布,按船舶辐射噪声谱级经验公式,初步估计了三处不同位置接收点的由航船噪声源引起的低频海洋环境噪声特性。
1 海上航船分布数据
1.1 数据获取
当代声呐技术向低频远程探测迅速发展,航船噪声是主要低频海洋噪声源,要获取关注海域、关注时间内的航船分布情况,可以借助港口进出航船信息数据库、船舶自动识别系统(AIS),卫星侦察和飞机航拍等多种方式进行,每种方式所需要的费用和获取数据的质量均不相同,条件允许时可开展多种形式相结合的综合调查方式,这样获得的数据更为全面完整。
1.1.1 港口进出航船信息库调研 港口进出航船信息库数据包含了船舶进出港的交通调度信息,数据比较准确,具有较重要的参考利用价值,但由于每个港口只对管辖区域内进出港的船只进行管理,因此即使同时获取多个港口的航船数据,因调查范围相对较小,对了解较广海域的航船分布作用较小。1.1.2 船舶自动识别技术及其数据库 船舶自动识别技术(AIS)由国际海事组织在九十年代推出,它通过安装在航船上的船载识别终端自动获取岸基和其它船舶信息,主要用于海上船只之间、船只与海上交管中心之间的相互识别,防止船舶碰撞。目前,我国300总吨及以上国际航行的船舶、500总吨及以上非国际航行的货船及所有客船均已配备 AIS设备。AIS采用超高频频段,它的覆盖范围取决于天线高度、发射功率、接收机灵敏度、天气状况和气象条件等,通常情况下,AIS系统岸基接收站可以接收到距岸30海里范围内的船舶信息;超过这一距离,AIS信息传输受天气影响较大,对较远海域内的航船,岸基站可能接收不到其AIS信号,需借助卫星接收。
1.1.3 卫星侦察技术 利用卫星侦察技术来获取航船分布,通常采用光学成像和合成孔径雷达成像混合型侦察卫星获取一定海面面积的照片,再通过图像识别技术得到航船信息,不仅能保证任何气象条件下的信息获取,而且具有侦察覆盖范围广、分辨率高等明显优势(吴技,2009);但是受卫星数目和运行轨道限制,往往不能够实时获得关注海域的航船分布,另外卫星调查的费用也较昂贵。
本文基于对前两种方式获取的海上航船信息进行分析处理,获得海上航船的分类分布。
1.2 进出港口航船分类分布分析
1.2.1 基于进出港口船只信息的航船分布 由某港口进出船只信息库获取了2010年1月至2012年4月进出该港口航船的数据,其中航船类型主要包含各种进、出港商货船(包括集装箱船、散货船、杂货船、油轮等)和渔船、客船。图2是不同年份每月进、出某港口的航船总数柱状图,横坐标表示月份,纵坐标为月航船总数。由图可见,历年来同一月份进港与出港船只的数目基本持平,而不同月份的船只数量差别较明显;每年2月份因天数少,进出港的船只数量略低于其它月份。
表1是该港口日进、出港船只统计特征,从表1可见,进出港商船的日均值相近,分别为 47.3艘和47.0艘。进港商船数的最大值和最小值分别为139艘和 13艘,出港商船数的最大值和最小值分别是 191艘和0艘,调查天数共851天。
表2和表3根据历史天气信息记录,对出港船只较少和较多的两种特殊情况出现的频数、具体日期和该海域对应的历史天气(大风、海浪、大雾等)状况给予简要描述。进港船只数目的日变化较平稳,出现大于 80艘的情况只有一次,即最大值 139艘,日期是2011年8月6日,正是气象部门预报2011年第九号台风即将登陆本地的时间,因而大量船只进港避风;而出港船只最大值191艘出现在2011年8月8日,即台风过后,由避风船只集中出港引起。极端天气出现的时段以及期间海上航船数的变化规律,对于今后利用历史航船数据、采用其它网络智能化推理方式预估某时日海上航船分布,进而估计低频环境噪声,具有重要指导借鉴价值,是一个不可或缺的输入量。
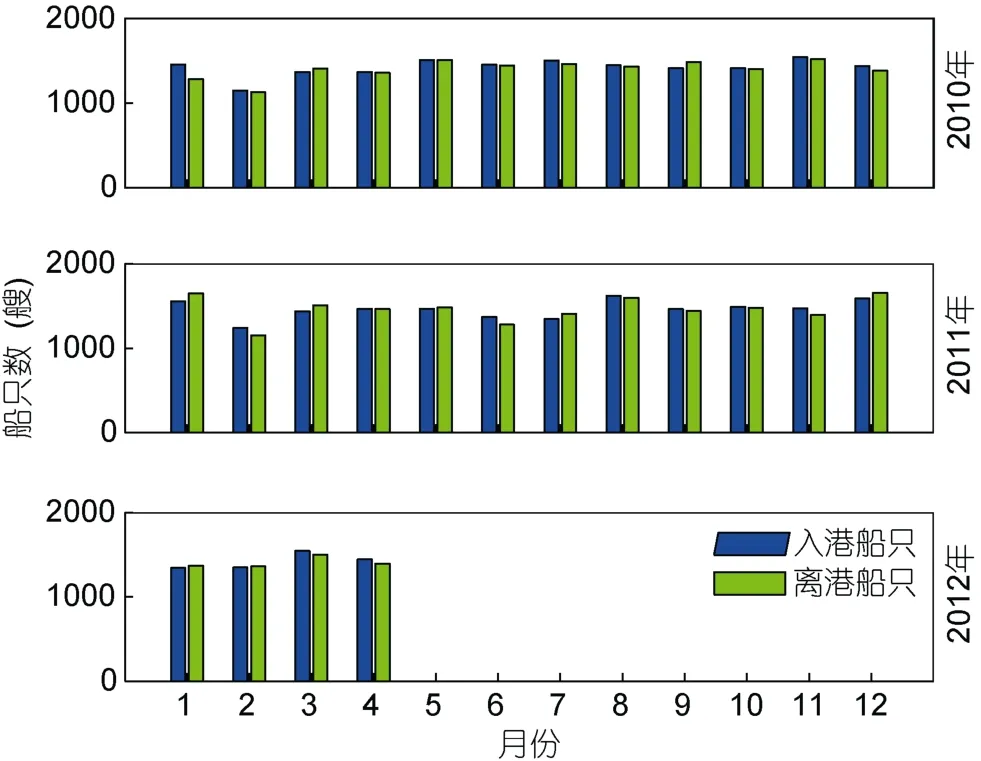
图2 月进、出某港口航船总数统计图(2010年1月—2012年4月)Fig.2 Total number of ships arriving in and leaving a certain port from January 2010 to April 2012

表1 日进、出港船只数统计特征Tab.1 Statistics of the number of ships in and out of the port
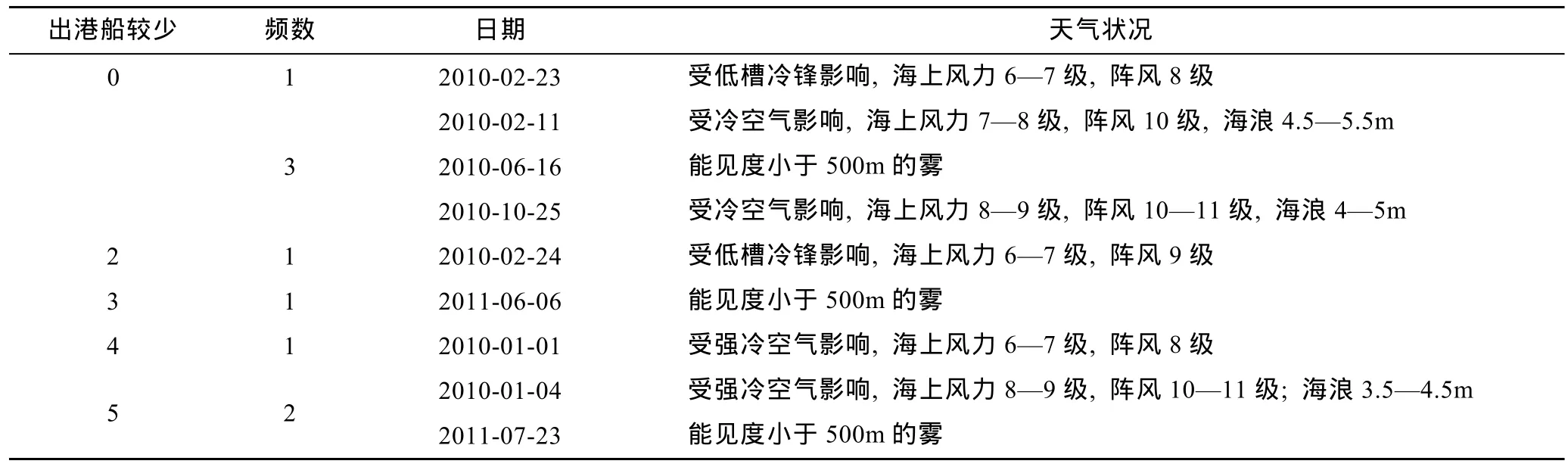
表2 出港商船少的特殊情况统计表Tab.2 Statistics of low amount of merchant ships leaving port

表3 出港商船较多时的天气状况Tab.3 Weather condition when many merchant ships leaving the port
图3是港口调查期间每日进、出某港口船只数的时间序列图(以天为单位,共 851天),图中红色虚线表示进、出港船只数的日均值。与进港船只数变化相比,出港的船只数目的日变化情况不平稳,均值线以下超出两个标准差范围的值存在较多。
图4给出了该港口日进、出港船只数的直方图及其正态分布拟合曲线,横轴为日进、出港船只数量,纵轴是航船数出现频数,图中红线是进、出港船只数的正态分布拟合曲线。从该图可看出,日进、出港航船数近似满足正态分布,但实际上由于恶劣天气海况出现的极端值情况明显偏离正态分布。因此,剔除受恶劣天气海况影响日进、出港船只数小于17艘的异常数据,只分析其余 815天的进、出港船只数据,给出日进、出港船只数的直方图,以及正态分布拟合曲线,见图5;同时给出剔除异常值后的每日进、出港船只数的正态P-P图和去势P-P图,见图6,P-P图a和图b中实线代表以进、出港船只数日均值和标准差为参数的正态分布的理论累计概率,圆圈散点代表统计进、出港航船数的实际累计概率。如果进、出港航船数服从正态分布,那么这些数据点应与理论直线值(对角线)基本重合;去势P-P图c和图d反映了按正态分布计算的理论累计概率值和实际累计概率差值的分布情况,如服从正态分布,则圆圈散点应较均匀地分布在Y=0直线上下。可以看出,筛选异常值之后,日进、出港船只数的理论累计概率和实际累计概率的残差绝对值均在 0.05以内,因此可以认为剔除恶劣天气海况的影响,日进、出港船只数均服从正态分布。
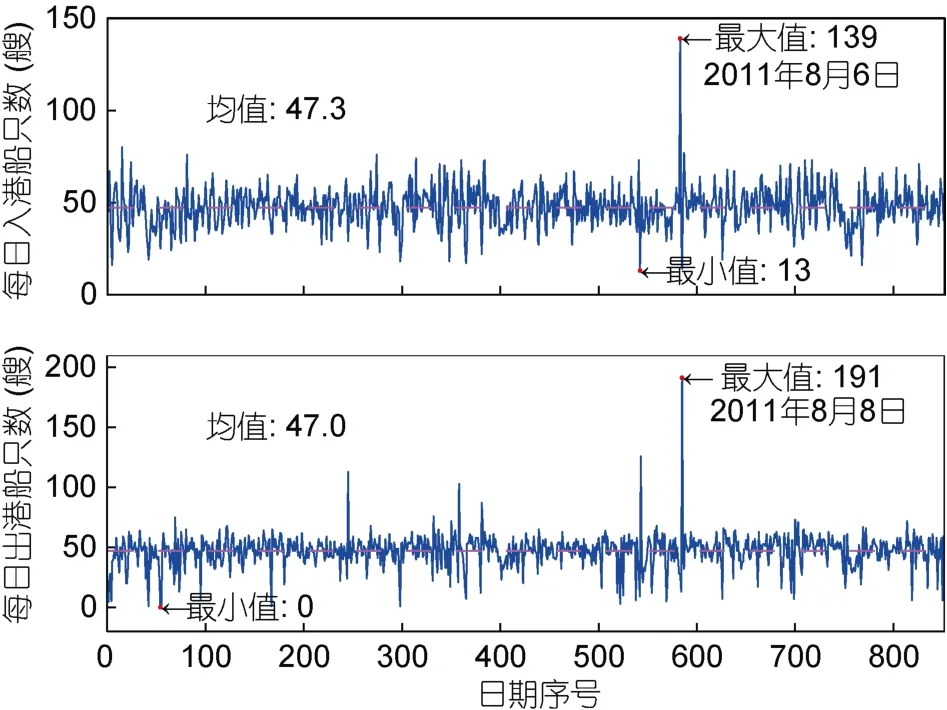
图3 日进、出某港口的船只数(2010年1月1日—2012年4月30日)Fig.3 Daily amount of ships in and out of the port during Jan.1,2010—April 30,2012
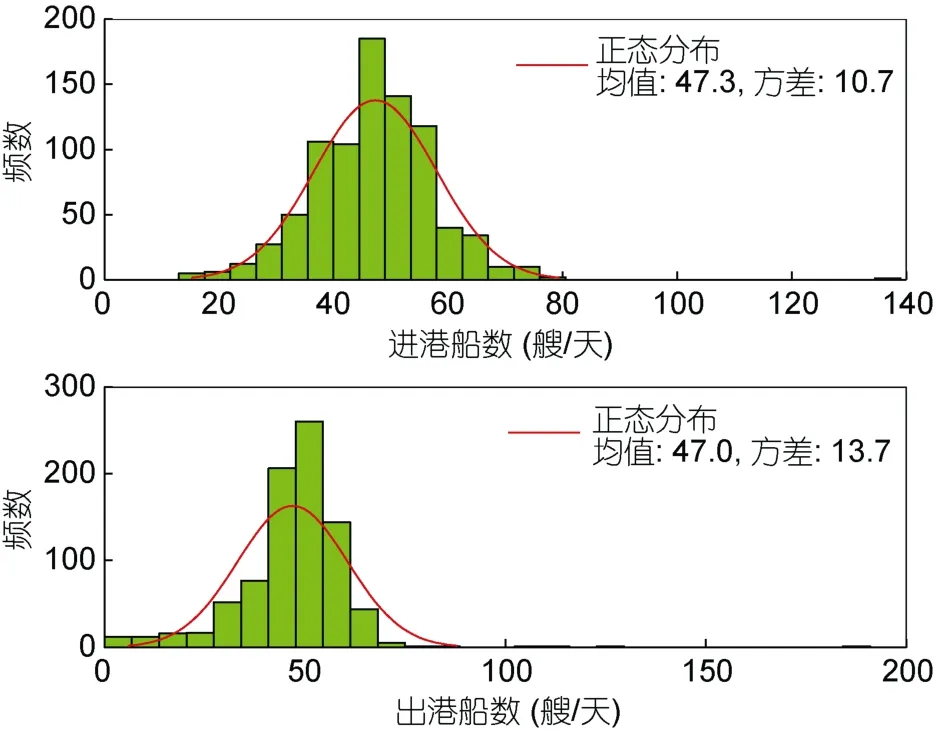
图4 日进出港船只数频数图及正态分布拟合曲线Fig.4 Frequency of daily amount of ships in and out of the port and the fitting curve of normal distribution
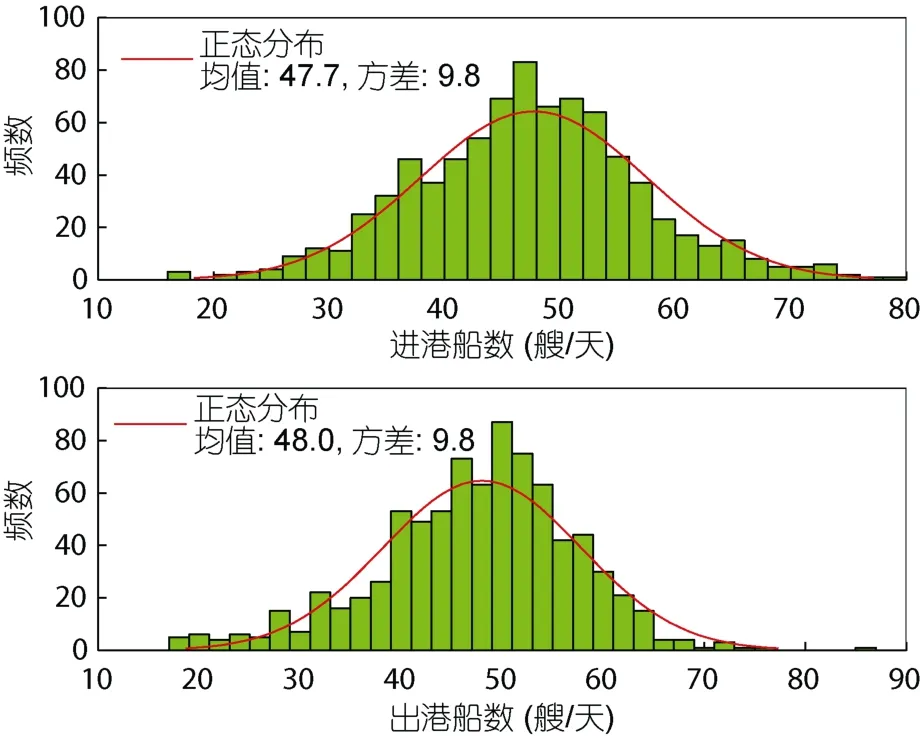
图5 剔除极端值后,日进出港船只数频数图及正态分布拟合曲线Fig.5 Frequency of daily amount of ships in and out of the port and the fitting curve of normal distribution exclusive of extreme

图6 剔除极端值后,日进、出港船只数的正态P-P图与去势P-P图Fig.6 P-P and detrend P-P of daily amount of ships in and out of the port and the fitting curve of normal distribution a、c: 进港;b、d: 出港
1.2.2 开阔海域航船分布统计 港口进、出航船信息库数据仅覆盖港口区域局部范围,为了获取开阔海域大范围和长时间的航船分布,调研了船舶自动识别系统(AIS)数据库,获得 2011—2013年我国周边海域的航船历史分布数据。船只类型包括商货船、邮客船、部分渔船,不包括公务船和军用船。要了解航船噪声源的分布,需要掌握单位面积、单位时间内的航船数,本文以6′×6′经纬度面积为单位(即1个网格单元)对关注海域进行网格划分,采样频率为1次/h。
图7给出关注海域2011─2013年的月度航船数变化,可以看出各月份的航船数量差别较大,其中 5月和 9月的船只总数较多,这两个月份处于每年休渔期的前后,受渔船集中出海捕捞作业影响。图8分别给出了2011—2013年渔船和商货船月度总数变化,每年5月和9月是小型捕捞船数量较高的月份,在6—8月禁渔期内,其数量相对较少,9月至来年的1月其数量缓慢下降,而2—5月则数量上升;商货船数量5月最多,6月次之,冬季最少。从航船的实时分布可以看出,5月绝大部分天数接收到AIS信息的船只距岸较远,6月和9月次之,而在冬季的绝大部分时间接收不到远距离船只的 AIS信息,应该与气象条件等因素有关。

图7 2011—2013年关注海域的航船数Fig.7 The number of ships in month from 2011 to 2013
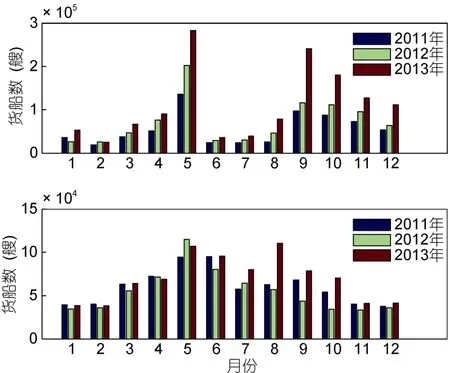
图8 2011—2013年关注海域渔船和货船的船只总数Fig.8 The total number of fishing vessels and merchant ships in month
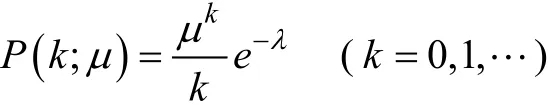
考察单位面积航船分布规律时,考虑到远距离AIS信号受气象因素的影响较大,利用AIS系统所获距岸较远的航船分布有可能不准确,选取距岸较近的单元网格(AIS信息较全面),对这些网格内不同月份的航船数据进行统计,获取其单位时间内出现n条航船(n=0,1,2,…)的频率。单位网格(6′×6′)内航船数出现频率统计结果如图9所示,图中蓝色方框表示由AIS数据获得的单位网格内航船数出现频率;按照网格航船数均值 μ为参数的泊松分布计算获得的概率用红色圆圈表示。蓝红两组数据比较吻合,且统计数据的均值和方差也比较接近,因此单位网格、单位时间内的航船数量可近似认为服从泊松分布,其中参数μ为该网格中单位时间内出现的航船数均值。泊松分布常用来描述单位面积上发生的小概率事件,以均值μ为参数,随机变量k的泊松分布可以表示为:
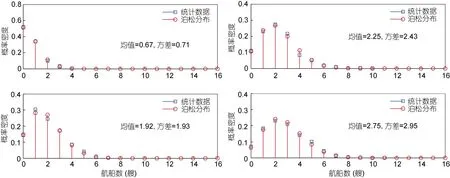
图9 不同单元网格航船数概率与泊松分布概率对比Fig.9 Probability density function of ships amount compared with Poisson distribution at different grids
2 航船对低频海洋环境噪声贡献的初步估计
本节在李家亮等(2014)针对噪声源水平非均匀分布建立的海洋环境噪声理论模型基础上计算由海上航船引起的环境噪声,给出不同位置接收点低频环境噪声强度的水平分布,并采用N×2D方法计算不同接收点环境噪声谱级随接收深度的变化曲线。
计算采用的环境参数如下: 海深40m,声速剖面分两种,一种是等声速,另一种是温跃层,如图10所示;考虑单层海底,海底声速为 1650m/s,密度为1.5g/cm3,衰减系数为 0.5dB/λ,计算频率为 100Hz。图11是利用AIS系统获得的航船噪声源分布,用不同的颜色表示不同长度的船只,符号“⊕”表示三个不同接收点R1、R2、R3,R1周边近距离船只较少,R2、R3位于不同的航道附近,可见该海域航船噪声源呈水平非均匀分布,接收点周边的航船分布情况各不相同。各艘航船的航速和船长信息由AIS数据提供,航船噪声源级可以根据相关经验公式(Breeding et al,1996)计算获得,表4列出距各接收点最近的5艘航船信息,包括距离、方位和声源级。航船到接收点的声传播损失采用与水平距离无关的简正波理论进行计算。
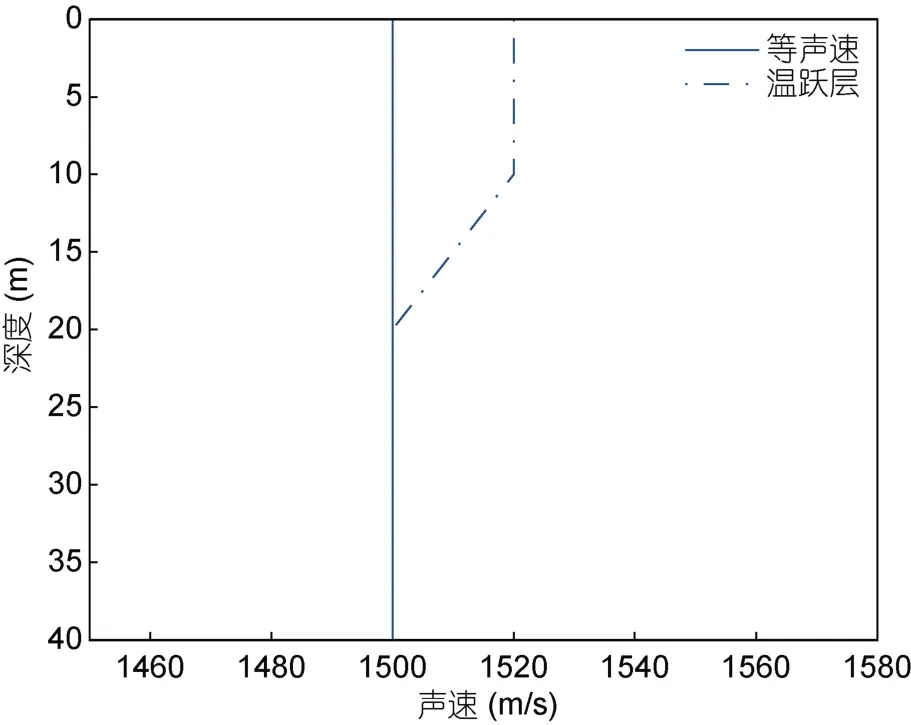
图10 声速剖面示意图Fig.10 Sound speed profile
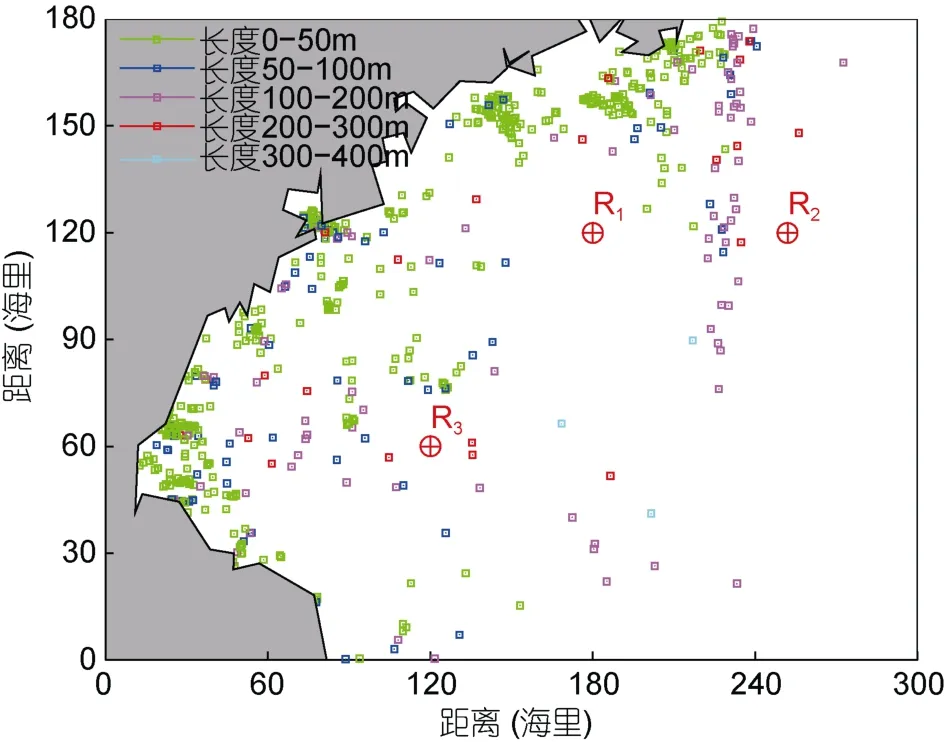
图11 不同船长的航船位置分布图Fig.11 Discrete ship locations at different ship length intervals R1、R2、R3 为三接收点
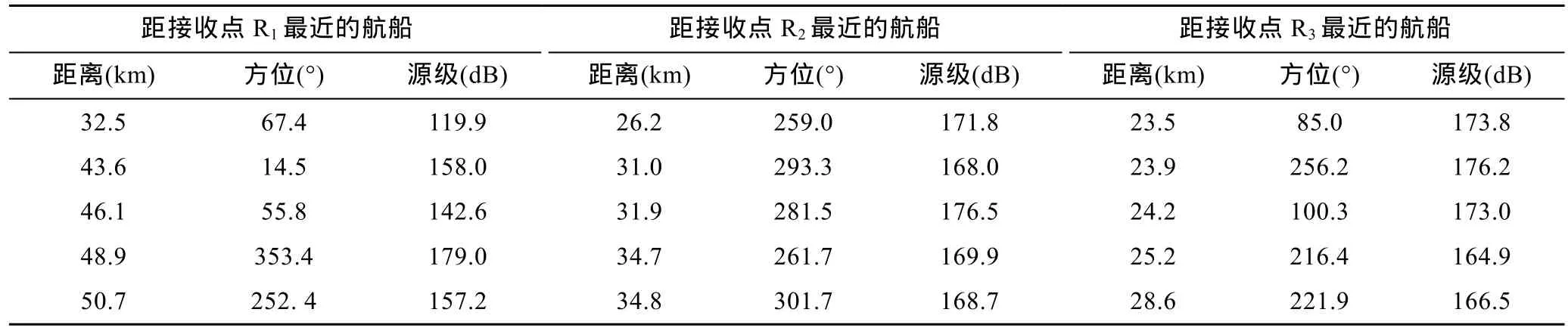
表4 三接收点附近的航船信息Tab.4 Information of ships near the three receivers
图12和图13分别对应等声速和温跃层两种声速剖面情况下,计算获得的R1、R2、R3在接收深度13m处的航船噪声强度沿水平方向的分布。结合图11可见,航船引起的环境噪声强度沿水平方向分布显著不均匀,且不同接收点噪声强度的分布不同: 接收点R2左侧分布有航道,港口,航船密集,在右侧航船甚少,因此该接收点环境噪声强度水平分布左侧高,右侧明显低;而R1、R3周边均有若干航船,其噪声强度在水平各方向不同,距离近的航船对接收点的噪声贡献影响较大;相对于等声速,温跃层声速剖面情况下由于声传播损失的增加,各方向的噪声强度普遍减低。由此表明,航船引起的环境噪声强度呈水平非均匀分布,这与水平均匀分布的海洋环境噪声场显著不同,后者是水下探测中比较常用的关于背景噪声的一种假设。图14是两种声速剖面情况下三接收点的航船噪声强度随海深的变化,同时还给出利用风关海洋环境噪声模型(衣雪娟等,2005)计算的海上无任何航船时风速为6m/s的风关噪声级随深度变化曲线。从等声速梯度剖面的算例来看,海上存在航船时的海洋环境噪声级明显大于风关噪声级,且垂直方向的强度分布也与风关噪声不同;由于传播损失增加,温跃层声速剖面的航船噪声强度要明显低于等声速情况。
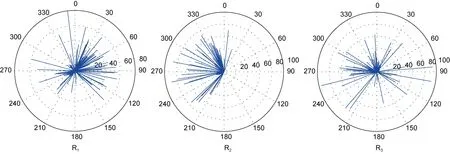
图12 航船噪声水平能量分布(等声速梯度剖面,100Hz)Fig.12 Horizontal distribution of ship noise (isovelocity SSP,100Hz)
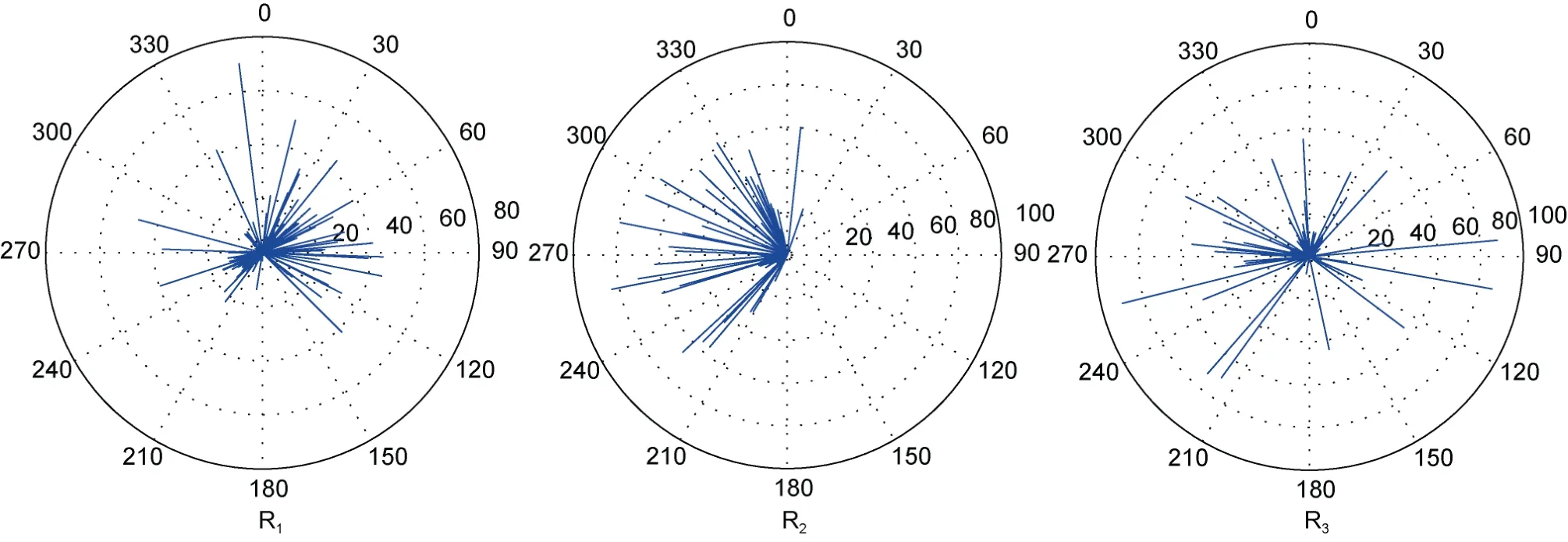
图13 航船噪声水平能量分布(温跃层声速剖面,100Hz)Fig.13 Horizontal distribution of ship noise (thermocline SSP,100Hz)
3 讨论
海上航船是海洋环境噪声的主要低频噪声源,由于航船在海上分布范围广,对其全面调查代价较高。本文依据港口通行量和船舶自动定位系统,调查分析了一段时间关注海域的航船噪声源分布情况。
由港口调查的进出港商船通行量统计数据可见,进出港商船的数量基本持平,每月的通行数量差别不大,在剔除极端恶劣天气海况影响的情况下,日进出港的航船数量基本满足正态分布。
由岸基船舶AIS信息资料分析发现,关注海域的航船总数在不同月份的差别较大,五月份和九月份船只数量相对较多,而冬季的船只数量最少,这与相关海域休渔期政策的实施以及气象条件影响岸基AIS信息远距离接收等因素有密切的关系;对距岸较近的船舶AIS信息数据统计分析发现: 单位时间、单位面积内的航船数近似满足小概率事件的泊松分布。
海面航船噪声源水平分布具有显著的非均匀性,由于不同航船谱级以及源到接收点的声传播损失不同,会导致接收点单位水平角度内海洋环境噪声强度呈明显的非均匀分布,在航道和港口方向,以及近距离存在航船方向的噪声强度相对较高。与海上无航船、风速6m/s时的风关海洋环境噪声相比,海上存在航船时的海洋环境噪声级明显较高,本例中航道附近接收点100Hz环境噪声级高于无航船风关环境噪声(约 20dB);另一附近航船较少的接收点,考虑航船噪声源后的环境噪声级也高于无航船时环境噪声级(约3dB)。因此,对于航船通行较为频繁的海域,海上航船噪声源对低频环境噪声的贡献甚为显著。
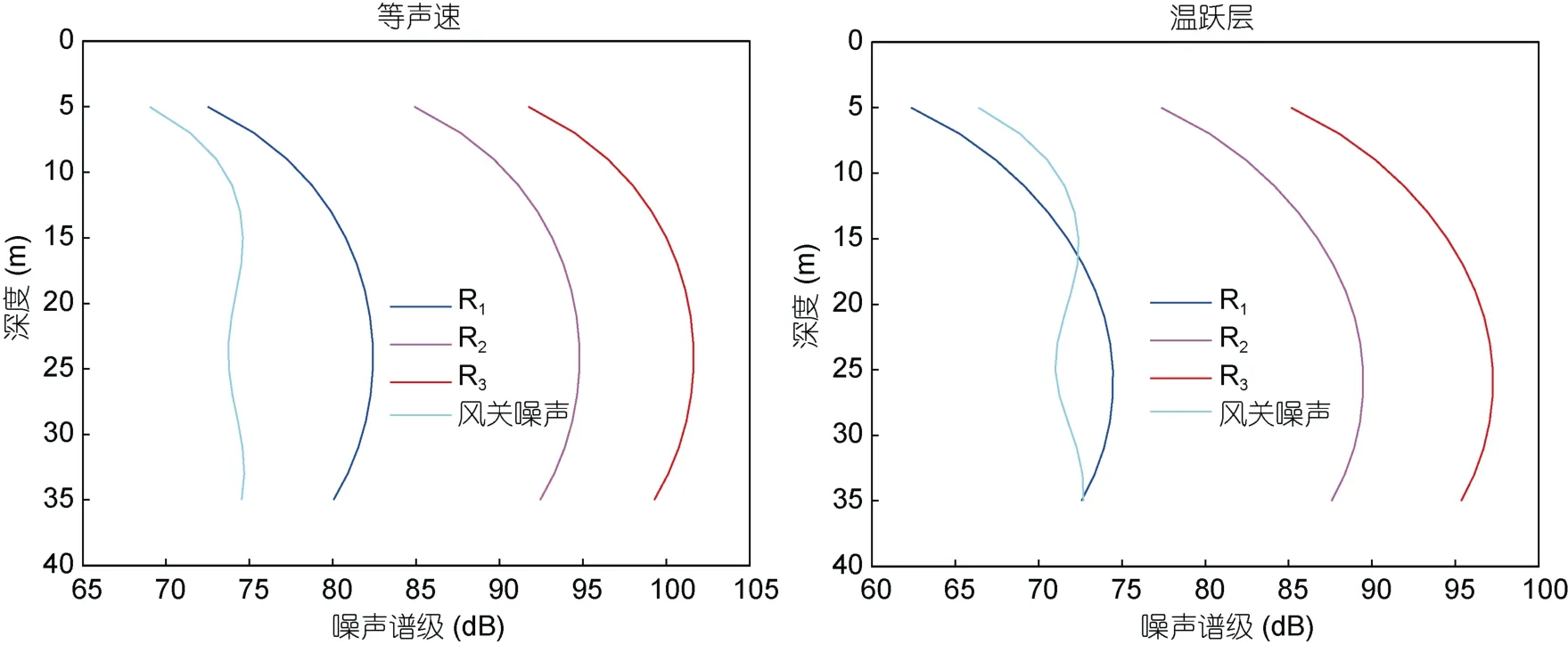
图14 三接收点航船引起的环境噪声级与风关噪声对比(等声速梯度与温跃层声速剖面,100Hz)Fig.14 Sound level of shipping noise at the three receivers compared to wind noise (isovelocity and thermocline SSP,100Hz)
4 结论
本文在海上航船分布调查数据和航船海洋环境噪声理论模型的基础上,获取了关注海域海上航船分布规律,并数值计算了航船对海洋环境噪声特性的影响。受本文航船分布数据获取方式的影响,可能对近处渔船和远处商船的统计出现偏差,影响到航船噪声源级的准确估计,而源级正确与否是模型数值计算的关键,今后需要通过航船噪声数据测量分析等工作进一步完善航船噪声源级的估计。另外在复杂的海洋波导环境中,水声环境因素如声速剖面、海底底质、内波等对声传播均有影响,研究复杂波导环境中的航船海洋环境噪声特性,需要综合考虑上述环境因素。
衣雪娟,林建恒,苑泉乐,2005.风关海洋环境噪声模型及预报结果.中国声学学会 2005年青年学术会议论文集,153—155
李家亮,林建恒,郭圣明等,2014.噪声源非均匀分布海洋环境噪声水平声能流理论分析.声学学报,39(6): 673—684
吴 技,2009.国外航天侦察系统的现状与发展.电讯技术,49(5): 108—114
Andrew R K,Howe B M,Mercer J A et al,2002.Ocean ambient sound: comparing the 1960s with the 1990s for a receiver off the California coast.ARLO,3(2): 65—70
Breeding Jr J E,Pflug L A,M Bradley et al,1996.Research Ambient Noise Directionality (RANDI)3.1 Physics Description.NRL/FR/7176-95-9628,Stennis Space Center,MS: Naval Research Laboratory
Frisk G V,2004.Historical Trends in Shipping Noise.Arlinglon Virginia,USA: National Oceanic and Atmospheric Administration (NOAA)International Symposium
Knudsen V O,Alford R S,Emling J W,1948.Underwater ambient noise.J Marine Res,7(3): 410—429
McDonald M A,Hildebrand J A,Wiggins S M et al,2008.A 50 year comparison of ambient ocean noise near San Clemente Island: a bathymetrically complex coastal region off Southern California.J Acoust Soc Am,124(4): 1985—1992 McDonald M A,Hildebrand J A,Wiggins S M,2006.Increases in deep ocean ambient noise in the Northeast Pacific west of San Nicolas Island,California.J Acoust Soc Am,120(2):711—718
Miksis-Olds J L,Bradley D L,Niu X M,2013.Decadal trends in Indian Ocean ambient sound.J Acoust Soc Am,134(5):3464—3475
Ross D,2005.Ship sources of ambient noise.IEEE J Oceanic Engin,30(2): 257—261
Wenz G M,1962.Acoustic ambient noise in the ocean: spectra and sources.J Acoust Soc Am,34(12): 1936—1956
猜你喜欢
智族GQ(2024年5期)2024-06-03 22:33:57
民航管理(2022年5期)2022-07-07 09:22:56
今日农业(2021年12期)2021-11-28 15:49:26
环球时报(2019-11-06)2019-11-06 04:14:24
石油地球物理勘探(2018年6期)2018-03-22 03:05:26
经营者(2018年23期)2018-03-06 08:18:10
湖南大学学报(自然科学版)(2016年5期)2016-08-25 08:19:53
航运交易公报(2016年6期)2016-03-05 00:11:31
应用声学(2015年3期)2015-10-27 02:52:49
航运交易公报(2015年18期)2015-05-27 03:15:36