
基于PSD的静电悬浮位置测量与控制系统设计
2015-04-08 06:41:23孙志斌王飞龙翟光杰
传感器与微系统 2015年3期
代 斌, 孙志斌, 王飞龙, 翟光杰
(1.中国科学院 复杂航天系统电子信息技术重点实验室,空间科学与应用研究中心,北京 100190; 2.中国科学院大学,北京 100190)
基于PSD的静电悬浮位置测量与控制系统设计
代 斌1,2, 孙志斌1, 王飞龙1,2, 翟光杰1
(1.中国科学院 复杂航天系统电子信息技术重点实验室,空间科学与应用研究中心,北京 100190; 2.中国科学院大学,北京 100190)
建立了基于位置敏感探测器(PSD)的静电悬浮三维位置信息测量与控制系统,分析了PSD的结构与静电悬浮位置测量与控制原理。系统采用单片机STC12C5A60S2处理PSD输出信号,得出悬浮样品位置信息与PSD输出电压的对应关系,实现单片机与上位机的通信,对测量的位置数据进行分析、处理以及悬浮样品位置控制。利用锆材料进行悬浮实验,实验结果表明:建立的测量系统能实现样品位置信息的非接触测量与稳定悬浮,具有测量数据可靠,运行稳定等优点,为材料悬浮加热和深过冷研究奠定了基础。
位置敏感探测器; 静电悬浮; 信号处理
0 引 言
深过冷(温度远低于熔点以下还保持液态)是材料科学重要的前沿课题之一,在金属材料的研究过程中,发现深过冷不仅能够获得非晶相,而且能够获得超有序的单晶体,根据这种超有序的晶体结构可以获得晶体内部的原子排列[1]。研究材料的微观结构与性能的关联关系对获取新材料有重要意义[2]。
无容器材料加工是进行材料深过冷研究的重要手段,而静电悬浮技术是无容器材料研究的重要方法之一。静电悬浮技术是利用带电样品在静电场中受到的库仑力来抵消样品重力,实现无容器状态。无容器材料加工消除了容器壁对材料的污染、异质形核作用,有利于材料样品获得深过冷,对材料的研究和新材料的制备有重要的理论和现实意义[3~5]。为了实现静电悬浮样品的悬浮与深过冷研究,需要对样品的位置信息进行非接触测量。
位置敏感探测器(position sensitive detector,PSD)是基于非均匀半导体横向光电效应[6],对入射光或粒子位置敏感的光电器件,具有灵敏度高、位置分辨率高、响应速度快、非接触测量等优点,在精密尺寸测量、超高速光通信、兵工等领域具有广泛的应用价值[7]。本文详细介绍了一维PSD的结构和工作原理,并分析了静电悬浮位置测量原理,最后提出了以德国SiliconSensor公司的二维PSD DL100—7PCBA3作为光电传感器,STC12C5A60S2单片机作为信息处理单元,结合其他外围处理电路和光源,设计了一种静电悬浮位置测量控制系统。
1 测量系统原理
1.1 PSD工作原理
PSD对入射光在光敏面的光点位置敏感,可以通过各输出电极上电流信号的比值来确定入射光的位置[8]。一维PSD的断面结构如图1所示。
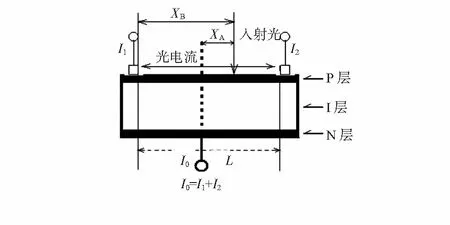
图1 一维PSD断面结构
PSD由三层构成,最上一层是P层,下面是N层,中间插入一较厚的高阻I层,形成P-I-N结构,此结构的特点是I层耗尽层宽,结电容小,光生载流子几乎都在I层耗尽区产生,没有扩散分量的光电流,因此,其响应速速比普通P-N结光电二极管要快得多。当光照射到PSD表面上时,在光斑位置处产生正比于光能量的电子—空穴对流过P层电阻,分别从P层相对的两个电极上输出电流I1和I2,由于P层电阻是均匀的,所以,电极输出的光电流反比于入射光位置到各自电极之间的距离。
二维PSD的工作原理与一维基本相同,分为四边形PSD、二面型PSD和枕型PSD[9]。四边形PSD具有很小的暗电流和较高的反向击穿电压,但其位置线性度差,而二面型PSD具有很好的位置线性度,但暗电流较大。运用Gear定理设计出来的枕型PSD具有暗电流小,位置线性度良好的特点,在实际二维测量设计中得到了广泛的使用。本文设计的位置测量系统就是基于枕型PSD。
1.2 静电悬浮位置测量原理
本测量系统中采用阴影法测量悬浮样品位置,使用能量均匀的平行光照射到整个PSD的感光面上,若被测物体在PSD的前方,那么,被测物体的阴影就会留在PSD上。如果光斑能量分布均匀,则光斑重心位置同阴影位置线性相关,对PSD的测量信号进行反向放大即可得到悬浮小球的位置信息。
要获得样品的三维位置信息,需要两片PSD平行z轴摆放并相互垂直。如图2所示,其中一片PSD检测悬浮材料的(x,z)坐标,另一片检测悬浮材料的(y,z)坐标,当两片PSD同时检测时即可获得悬浮材料的(x,y,z)坐标。

图2 位置检测结构示意图
2 测量与控制系统设计
2.1 总体结构
静电悬浮控制系统整体结构如图3所示。系统包括位置检测单元、处理控制单元、高压放大器及电极结构。位置检测单元使用PSD作为传感器,获得悬浮样品的位置信号。处理控制单元对测量到的位置信号进行滤波处理并根据处理后的位置信号进行PID控制运算,将输出的控制信号传给高压放大器,由高压放大器对电压控制信号进行放大,然后施加放大后的高压到上下电极,通过改变带电样品所受到的电场力调整悬浮样品的运动,实现对悬浮样品的悬浮控制。
本系统中采用DL100—7PCBA3作为位置探测器,响应精度为0.5 μm,线性度为±1 %,感光面积为10 mm×10 mm。采用波长为660,532 nm波段的激光作为位置激光。
为了实现三维控制,本系统需要三台高压放大器。因此,本设计选用美国Trek公司的TRE—20/20C—H—CE作为z方向的高压放大器,选择Trek公司的TRE—677B—H—CE作为x,y方向的高压放大器。

图3 悬浮系统组成
2.2 数据采集
PSD测量得到的信号是微弱的电流信号,通常只有μA级,不能直接进行信号采集,必须经过PSD信号处理电路进行处理,转换为电压信号并放大才能供控制系统使用。图4所示为一维PSD信号转换电路,图中,IC1,IC2,IC3,IC4为高精度的运算放大器,VR是给PSD施加的偏置电压。位置和电流电压的关系为
X/L=(I2-I1)(I2+I1)=(U2-U1)(U2+U1).

图4 一维PSD信号转换电路
经过信号转换电路处理后的位置信号为电压信号,但电压信号为模拟信号,其在传输的过程中易受到外界影响,为了防止噪声对位置信息的干扰,在信号采集之前在系统中加入A/D转换器将信号转换成数字信号后再加以处理。
2.3 数据处理与控制
本系统中采用宏晶科技有限公司生产的STC12C5A60S2单片机作为CPU,主要实现A/D采样、PID算法、D/A转换与上位机通信等功能。
A/D转换主要实现模拟信号到数字信号的转换,PSD模块输出±10 V的模拟量信号,经过A/D转换,才能给单片机处理。本文设计的A/D转换芯片采用具有16位精度的AD976,可转换±10V的电压。其采样流程为初始化AD,设定滤波所需采样次数后,启动A/D转换,延时20 μs左右的时间等待A/D转换结束,然后分别读取16位数据的低8位和高8位重新组装成16位数据,经过多次采样读取、一阶滤波,得到最终AD采集结果。
PID控制的结果需要经过D/A转换才能作用到高压放大器。本文设计采用AD7237作为D/A转换芯片,该芯片具12位转换精度,输出范围设定为±5 V。其数据输出流程为首先对DA芯片初始化,对要输出的参数作范围限制,防止转换时溢出发生错误,然后把16位的数据转换为高8位和低8位,分次写入AD7237,硬件将自动舍弃高8位的前4位。启动D/A转后,等待D/A转换结束。
3 实验结果与分析
本实验中采用直径2.5 mm的锆球做悬浮实验,如图5所示为悬浮实验实物图,中间发光的小球就是悬浮样品。悬浮过程中样品的位置曲线和控制电压曲线如图6(a)所示。样品稳定悬浮的部分截取100 s的数据进行放大得到如图6(b)所示的位置误差曲线,位置误差的波动范围在+0.2~- 0.2 mm之间。


图5 悬浮实验实物图

图6 实验结果
4 结 论
本文采用枕型PSD作为位置探测器,利用阴影法测量悬浮样品位置信息,结合PSD信号处理电路、A/D转换电路、D/A转换电路、控制电路、高压放大器以及电极结构实现了静电悬浮位置信息测量与控制。利用锆球进行悬浮实验,从实验结果可以看出:所建立的测量系统能实现样品的非接触测量与悬浮控制,具有测量数据可靠,运行稳定等优点,位置控制误差为+0.2~-0.2mm。本文的研究工作为材料悬浮加热和深过冷研究奠定了基础。
[1]RulisonAJ,WatkinsJL,ZambranoB.Electrostaticcontainerlessprocessingsystem[J].RevSciInstrum,1997,68(7):2856-2863.
[2]SungYS,TakeyaH,ToganoK.ContainerlesssolidificationofSi,Zr,Nb,andMobyelectrostaticlevitation[J].ReviewofScientificInstruments,2001,72(12):4419-4423.
[3]ParadisP,IshikawaT,YodaS.ElectrostaticlevitationresearchanddevelopmentatJAXA:Pastandpresentactivitiesinthermophysics[J].InternationalJournalofThermophysics,2005,26(4):1031-1049.
[4]IshikawaT,KikōUKKK.Thermophysicalpropertiesofliquidandsupercooledrareearthelementsmeasuredbyanelectrostaticlevitator[M].Tsukuba:JapanAerospaceExplorationAgency,2008.
[5] 胡 亮,鲁晓宇,侯智敏.静电悬浮技术研究进展[J].物理,2007,36(12):944-950.
[6] 贺安之,阎大鹏.现代传感器原理及应用[M].北京:宇航出版社,1995.
[7] 庞亚萍.位置敏感探测器的发展状况及应用研究[J].科技情报开发与经济,2007,16(24):183-185.
[8] 于丽霞,王福明.一维 PSD 器件及其在测量中的应用[J].现代电子技术,2007(7):143-144.
[9] 唐九耀,黄梅珍.二维 PSD 的结构和性能分析[J].功能材料与器件学报,2000,6(3):301-304.
Design of measurement and control system of position of electrostatic levitation based on PSD
DAI Bin1,2, SUN Zhi-bin1, WANG Fei-long1,2, ZHAI Guang-jie1
(1.Key Laboratory of Electronics and Information Technology for Space Systems,Chinese Academy of Sciences,Beijing 100190,China; 2.University of Chinese Academy of Sciences,Beijing 100190,China)
A measurement and control system of three-dimensional(3D) position information of electrostatic levitation based on position sensitive detector(PSD) is setup and structure of PSD and position measurement and control principle of electrostatic levitation are analyzed.Output signal of PSD is processed by STC12C5A60S2 MCU,corresponding relationship between suspension sample position information and output voltage of PSD is obtained,and communication between MCU and upper PC,data analysis and processing,and position control on levitation sample are realized.Use zirconium materials to carry out suspension experiment and test results indicate that the system can realize non-contact measurement of sample position information and stable suspension of sample,and it has advantages of stable operation and reliable detecting data,and so on,and this measurement system laid foundation for material suspended heating and undercooling research.
position sensitive detector (PSD); electrostatic levitation; signal processing
10.13873/J.1000—9787(2015)03—0097—03
2014—07—23
TP 274
A
1000—9787(2015)03—0097—03
代 斌(1988-),男,河南信阳人,硕士研究生,主要研究方向为图像处理与空间智能仪器。
猜你喜欢
军民两用技术与产品(2022年6期)2022-08-06 07:31:44
小哥白尼(趣味科学)(2022年2期)2022-05-25 13:20:58
初中生学习指导·中考版(2022年4期)2022-05-12 00:12:51
中学生数理化·中考版(2019年10期)2019-11-25 09:39:06
电子制作(2019年24期)2019-02-23 13:22:20
电子制作(2018年17期)2018-09-28 01:56:44
科学大众·小诺贝尔(2016年11期)2017-01-10 21:02:35
创新作文(小学版)(2016年16期)2016-11-11 05:47:47
发明与创新(2015年1期)2015-02-27 10:38:25
河南科技(2014年24期)2014-02-27 14:19:40
