基于机器视觉的桥梁检测技术现状及发展
2015-04-08 10:32赵启林
现代交通技术 2015年6期
庞 娜,赵启林,芮 挺,朱 斌
(1.解放军理工大学野战工程学院,江苏 南京 210007;2.南京狄诺尼科技有限责任公司,江苏 南京 210007)
1 概述
桥梁作为交通运输的载体,在人们的日常出行中已不可或缺。在一座座大型桥梁拔地而起的同时,桥梁倒塌等恶性事件也时有发生,造成巨大的生命财产损失,因此保障桥梁的安全运营也成为关系国计民生的一件大事,桥梁检测任务刻不容缓。
桥梁检测技术历来是国内外学者关注的热点,在桥梁检测的实际工程中,从最初的人工检测,到桥梁检测车,再到各种结构的无损检测,一直到现在的智能化检测,都是在实际的应用与实践中,逐步地发现问题,探究对策,最后提出新方法、新思路以期能够解决问题[1]。人工检测法和桥检车法都是依靠人工用肉眼对桥梁表面进行检测,其速度慢,效率低,漏检率高,实时性差,影响交通,存在安全隐患,很难大幅应用[2-3];无损检测包括激光检测、超声波检测以及声发射检测等多种检测技术,它们仪器昂贵,测量范围小,不能满足日益发展的桥梁检测要求[4-7];智能化检测有基于导电性材料的混凝土裂缝分布式自动检测系统和智能混凝土技术[8],也有最前沿的基于机器视觉的检测方法[9-16]。导电性材料技术虽然使用方便,设备简单,成本低廉,但是均需要事先在混凝土结构上涂刷或者埋设导电性材料进行检测,而且智能混凝土技术还无法确定裂缝位置、裂缝宽度等一系列问题距实用化还有较长的距离;而基于机器视觉的检测方法是利用CCD相机获取桥梁表观图片,然后运用计算机处理后自动识别出裂缝图像,并从背景中分离出来然后进行裂缝参数的计算的方法,它具有便捷、直观、精确、非接触、再现性好、适应性强、灵活性高、成本低廉的优点,能解放劳动力,排除人为干扰,具有很好的应用前景。
基于机器视觉的检测方法是目前最受人们关注的桥梁检测法,它基于机器视觉理论,目的是让计算机代替人工,对桥梁进行远距离、高精度、低成本的自动检测。据统计,混凝土桥梁的损坏有90%以上都是由裂缝引起的,因此对桥梁的健康检测主要是对桥梁表观的裂缝进行检测与测量[17]。
基于机器视觉的桥梁检测技术主要包括三部分内容:桥梁表观图像的获取技术、基于图像的裂缝自动识别理论与算法以及基于图像的裂缝宽度等病害程度定量化测量方法。
2 桥梁表观图像的获取技术
道路与隧道结构表面视野开阔,标高较为一致、少有自然障碍,视频系统易到达且容易进行连续拍摄。但是桥梁梁体位于路线下方,较为隐蔽,而且有桥墩等自然障碍阻断;另外桥梁结构不仅有桥墩与梁体等低空构件,而且有桥塔、主拱等高耸构件;不仅有梁体、锚碇等面状或块状构件,还有拉索或支座等线状或点状构件,想要获取完整的桥梁表观图像其难度很大。因此,研究人员针对不同需求甚至桥梁上不同类型构件,开发了多种进行桥梁表观图像的获取技术,如表1所示。
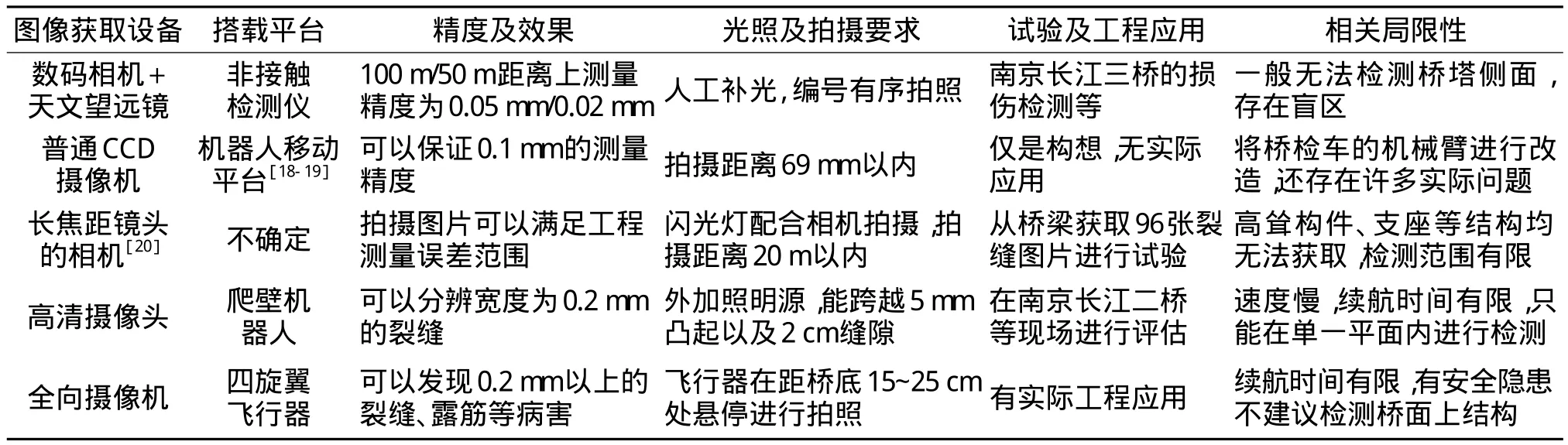
表1 桥梁表观图像获取技术汇总
从表中可以看出,已经成功应用于实际工程的只有3个:非接触检测仪、爬壁机器人以及四旋翼飞行器。下文主要介绍这3种图像获取技术。
2.1 非接触检测仪
图1所示的非接触检测仪[8,21]由解放军理工大学开发,他们最先在国内开发了该产品,主要用于桥梁的梁体、桥塔、锚室以及大型洞库的视频图像获取及检测,它能够适应多种桥梁结构与环境的检测要求,整套仪器携带方便,拆装简单,现场作业量小,后期处理直观,测量结果精度高,工作距离可以达到100 m。最近武汉大学也开发出类似的产品,如HTQF-X非接触桥梁检测仪[22],尽管测量精度达到了0.02 mm,但是工作距离只在50 m以内。

图1 非接触检测仪检测
2.2 爬壁机器人
南京理工大学[23,24](如图2所示)、哈尔滨工业大学[25]、日本大阪市立大学(如图3所示)等院校单位都有对爬壁机器人进行深入研究,由于爬壁机器人体积小、重量轻、成本低、效率高,机动性强,能进入一般难以到达的狭窄区域如支座、桥板背面等,因此可以进行连续无间断检测;南理工的爬壁机器人在桥塔等实际混凝土构件中进行了测试,它在平整面的移动速度最大可达12 m/min,视频图像传输连续、稳定、清晰,基本满足桥梁检测的技术要求。

图2 爬壁机器人检测
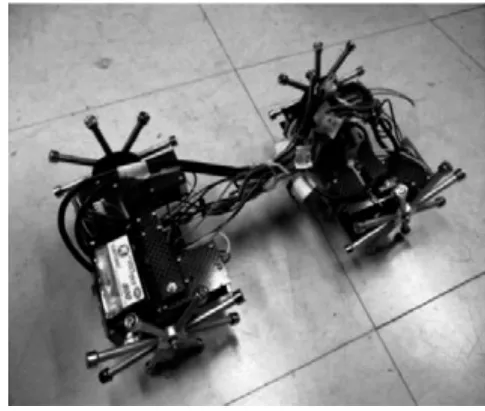
图3 日本磁吸式机器人
2.3 四旋翼飞行器
随着新材料、飞行控制技术及传感器技术等的发展,国内外对四旋翼飞行器进行了广泛而深入的研究[26],例如日本利用无人机进行桥塔等高空构件的外观检测,武汉理工大学利用无人机进行桥梁底面以及侧面进行检测[27](如图4所示)。四旋翼飞行器结构简单、操控性高,能在小区域范围内起飞、盘旋、飞行、着陆,在无人机上安装摄像头、测距仪等设备,使其可以近距离接近目标区域,实现人工遥控、航线飞行、定点悬停、拍摄图像并传回地面站进行图像处理[28]。目前武汉理工大学的四旋翼飞行器飞行高度达250 m,实现了距离桥底15 cm位置对桥梁的拍摄。

图4 四旋翼飞行器检测
虽然上述三种方法均已成功应用于工程实际,并取得了一定的成果,但由于实际工程问题的复杂性,为了获取更精确结果,目前较为常用的方法是结合两种或多种获取技术以得到完整的高质量桥梁表观图像。如何使用单一技术获取远距离、高质量、无盲区的桥梁表观图像技术仍需进一步研究。
3 基于图像的裂缝自动识别理论与算法
在桥梁表观图像采集过程中,特别是在条件相对恶劣的野外,由于光线、车辆、气流以及地面振动等的影响,使图像在成像过程中受到较多噪声的干扰,从而降低了图像的质量,加大了裂缝识别的难度,因此,需要削弱甚至消除这些干扰,对图像进行预处理,以降低噪声、改善图像质量,尽可能真实明显地保留裂缝信息,为计算机自动分析目标奠定基础[29]。裂缝识别一般包括图像预处理与裂缝提取两部分。
图像预处理一般包括3部分:图像压缩、图像去噪、图像增强。图像压缩是为了加快处理速度、减小存储内存,如将彩色图像灰度化,隔行隔列采样处理以尽量减少几何畸变等[30-31];图像去噪主要是削弱甚至消除在成像过程中所产生的干扰噪声,使裂缝目标更加突出,背景更加简单,裂缝提取更加精确,常用方法有中值滤波去噪、自适应滤波去噪和小波变换等[32-35];图像增强是为了突出图像中人们感兴趣的目标信息,增大图像中各物体特征间的差异,如强化图像的高频分量,可使图像中物体轮廓清晰,细节明显,常用方法是灰度直方图均衡化[36-38]。
由于图像本身的复杂性,加上成像环境不同,为了达到比较好的处理效果,针对不同的图像特征,所进行的预处理过程可能会有一些差别,如在处理顺序上不同,或者在处理过程中多次使用某一种处理方法,使预处理效果满足后续的裂缝提取条件。
经过预处理之后的图像,可以很清晰地发现裂缝,如图6所示。但这是人工识别,还需要进行裂缝提取来实现机器自动识别。混凝土裂缝自动识别方法目前在道路与隧道上的研究与应用最为成熟,在桥梁上虽然研究较多,但应用还很少,主要有阈值分割法、边缘检测法、基于区域生长的种子游走算法,基于频域的裂缝识别方法以及基于神经网络的裂缝识别方法。
3.1 阈值分割识别算法[31,39-43]
阈值分割识别算法是根据裂缝与背景所属的灰度范围不同,裂缝灰度值较小,背景灰度值较大,选取合适的灰度阈值将图像中的裂缝与背景分离开来,从而提取裂缝进行分析测量。常用方法有:全局阈值法、局部阈值法以及自适应阈值法。阈值分割法一般只适用于背景灰度一致、光照均匀和对比度较高的图像,且不能很好地区分与裂缝特征相似的水迹、划痕等干扰物,对于暴露在空气中、局部有水迹、修补等痕迹的混凝土结构难以应用。
3.2 边缘检测识别算法[34,36,40,41,44-47]
裂缝具有较强的边缘特征,即灰度有明显的阶跃现象,而背景灰度则变化缓慢、梯度较小,因此可以通过边缘检测来识别裂缝。基于该思想,人们设计了许多边缘检测算子,如梯度算子、拉普拉斯算子、Canny算子等。梯度算子是一阶微分算子,较常用的有Roberts算子、Sobel算子和Prewitt算子,它们对噪声敏感,适合边缘较尖锐、噪声较小的情况,但它只有水平和垂直两个方向的模板,而不是图像的实际边缘方向,并不适合应用于裂缝检测;拉普拉斯算子是不依赖于边缘方向的二阶微分算子,它对细线和孤立点效果较好,但对噪声敏感,由于它是标量算子,不能提供边缘方向信息,容易产生双边缘,因此一般不直接使用;Canny算子是以一阶导数确定边缘点,具有滤波、增强和检测的多阶段优化算子,它的3个最优准则使它具有高定位精度、低误判率、抑制虚假边缘的效果,同时还使用高低阈值分别检测强边缘和弱边缘,并且仅当弱边缘与强边缘相连时才将其包括在输出图像中。Canny算子在这几种边缘检测算子中效果最好,比较适合高噪声图像,但也容易平滑掉一些边缘信息,可以对其进行改进优化以便取得更好的裂缝提取效果,Canny算子及其优化算子在路面检测和隧道检测的工程实例中均有涉及,有望将其用于桥梁检测。
3.3 基于区域生长的种子游走算法[37,41,48-51]
图像分割的目的是将图像划分为不同的区域,基于区域生长的种子游走算法是以直接寻找区域为基础的分割技术。它是根据事先定义的准则将像素或子区域聚合成为更大的区域的过程。基本方法是以一组“种子”点开始,按某种规则进行游走,将与种子点性质相似(如灰度级)的相邻像素附加到生长区域的每个种子上,即得到裂缝点的位置信息。最后根据这些相似的种子点的特征,如是否能够连成一条具有相同走向的细长线段等裂缝特征来判断图像中有无裂缝。由于目前的桥梁裂缝检测主要是指混凝土桥梁裂缝检测,在实际的混凝土结构表面,由于材料性质的原因本来就凹凸不平,存在许多空隙,因此运用区域生长的种子游走算法进行混凝土裂缝的检测并不合适,存在的噪声太多,无法快速精确提取裂缝。
3.4 基于频域的裂缝识别方法[2,18,31,50,52-54]
利用图像中包括的裂缝目标、背景以及各种噪声所属的频域等特征值不同而进行识别,具体情况如表2所示。
基于频域的裂缝识别方法主要是用高通滤波器、低通滤波器和小波变换对图像进行操作。高通滤波器是提取信号的高频部分,保留了图像的细节;低通滤波器是去除高频信号,保留信号的低频部分,有平滑滤波的效果;而离散小波变换可以表示由高通滤波器和低通滤波器两部分组成。由于在实际桥梁裂缝图片中干扰噪声较多,其所属频域范围有交叉重叠现象,因此并不能很好地将裂缝从背景中提取出来,所以在桥梁裂缝检测中应用很少。

表2 裂缝图像中各部分信息对比
3.5 基于神经网络的裂缝识别方法[31,55-59]
神经网络是通过模拟人的大脑的工作模式和结构机制来实现机器的智能化,具有自组织、自学习和自适应的特点。运用神经网络进行裂缝识别需要大量训练样本对计算机进行训练,其中包括含有裂缝的正样本和不含裂缝的负样本。训练的目的是告诉计算机图片中含有哪些特征的可能是裂缝图像,含有哪些特征的可能是背景图像。神经网络一般包括输入层、隐含层和输出层,其特点是信息正向向前传播,误差反向传播,不断地进行网络各层权值和阈值的调整,从而使网络的实际输出不断地逼近期望输出,以保证结果的正确率。采用神经网络法进行裂缝识别需要大量的样本进行训练,需要进行监督学习,其计算成本高,速度较慢,诊断过程相当繁琐。但准确率较高,效果较好。在桥梁裂缝检测中神经网络法才开始研究,还来不及用工程实践来验证其价值,但由于它的优势明显,将会成为桥梁检测的热点研究方向之一。其具体处理过程如图5所示。
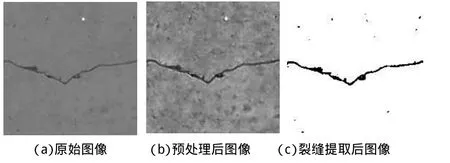
图5 裂缝处理过程
随着计算机技术和摄影技术的飞速发展,Canny算子边缘检测法和神经网络法是最具潜力的裂缝提取算法。Canny算子不仅具有3个最优准则,同时还利用双阈值进行边缘检测,以保证弱边缘的检出率;而神经网络是桥梁检测中的新技术,不仅能适应各种环境,还能够将误差进行自我修正以得到更为精确的结果;它们尽管过程比较繁琐,但是原理比较简单,可以进行优化改进的地方还有很多,而且目前其效果也比较显著,其发展空间尤为广阔。
4 基于图像的裂缝宽度等病害程度定量化测量方法
桥梁裂缝检测最终是为了获得裂缝的位置、长度以及宽度等具体数据,并利用这些检测数据来评价和控制桥梁质量,为桥梁维护和管理提供数据支持,提高桥梁管理水平[60]。桥梁表观图像经过前期一系列处理之后,将人们所感兴趣的部分从计算机的视角来进行强化突出以便于机器自动识别,但识别结果也只是提供图像中的二维像素信息,因此,还需要进行病害程度的定量化测量,获得裂缝位置、宽度以及长度等三维实际具体数据以待进一步分析与维护。
关于裂缝位置信息的确定,目前常用的有GPS定位法[61]和编号有序拍摄对号入座法[62-64]。由于大型桥梁桥面宽度较大,桥底大部分无法接收GPS信号或者说GPS信号定位精度很低,难以满足桥梁检测的精度要求,若不是有专门的定位精度改良方法且满足精度要求,一般不予采纳;编号有序拍摄对号入座法就是在获取桥梁表观图像时,对不同构件进行分类编号,然后按照某种规则顺序进行拍摄并编号,如果条件允许,还可以生成桥梁的3D画面,然后将检测出的桥梁病害部位在3D图像中进行标记以便后期管理和跟踪检测。
常用的基于图像的裂缝长度和宽度等病害程度定量化测量方法有:基于坐标转化的标尺法、测距法和基于裂缝像素信息的像素数法。
4.1 标尺法[65]
标尺法的基本原理就是通过在桥梁表面临时设置标尺或利用已知尺寸的自然标志物充当标尺,直接获取象素数与标尺长度的比例系数k,利用该系数得到所需的裂缝宽度与长度等信息。
4.2 测距法[66-67]
测距法就是直接利用激光测距仪或者其他测距仪器测得的物距u(u为镜头光心到物体表面的距离)来计算裂缝宽度的方法。其基本原理是根据透镜成像原理,在摄影测量的物距为u的某一位置,建立裂缝宽度在图像中所占象素数与其实际物理宽度之间的坐标转换公式,代入相机成像CCD的相关参数来计算裂缝的实际宽度。
4.3 像素数法[18,29,39-40]
桥梁表观图像经过前期处理之后得到最为简单的二值图像。以横向裂缝为例,通过逐列扫描裂缝区域的像素数并进行累加,其总数最大者为裂缝宽度最大值,总数最小者为裂缝宽度最小值。当然,这里可能存在毛刺等的影响,因此还可以通过选取前3个最大值求平均以获得更为精确的裂缝宽度最大值。求裂缝长度时,可以先通过数学形态学法将裂缝细化为连续的单像素宽的裂缝骨架,然后运用欧式距离法或街区距离法以求得裂缝的长度。还有一些其他的计算裂缝长度的方法如直接用裂缝最小外接矩形长度作为裂缝的长度等,笔者认为其误差太大,故不加以叙述。需要说明的是,这里求的裂缝宽度和长度信息只是图像中的数据,应当乘以像素当量,以转换成为裂缝的实际尺寸。像素当量即一个像素代表的实际区域面积。裂缝面积可以通过累加裂缝区域像素数总数乘以像素当量即可获得。利用裂缝面积与裂缝长度的比值即为裂缝平均宽度。
要想完全实现桥梁的非接触高精度检测,像素数法的发展空间最为广泛,当然也存在一些不足,如在裂缝细化过程中可能发生断裂现象等,还需要进行更多的研究以得到更为精准的结果。
5 结论
基于机器视觉的自动化、智能化检测技术已经在道路、隧道上得到了成功应用,在桥梁上也得到了初步的应用,但主要集中在视线开阔的高空混凝土构件表观图像获取技术上,在病害的自动识别方面仍停留在理论研究阶段,还无法应用于实际工程当中。针对量大面广的混凝土梁体,智能化视频桥梁检测车进入理论与关键部件模型的研制阶段,但是受到桥梁细小裂缝自动识别与清晰图像快速化获取难度大的限制,目前离达到实用化程度的要求还相距甚远。应该在以下方面展开重点研究:
(1)梁体高质量清晰图像的快速获取技术。梁体裸露表面位于行车道下部位置隐蔽,而且受到桥墩自然阻隔,不仅摄像头到达难度大,而且也难以实现连续化的拍摄,因此开发能够可靠到达梁体表面、自动规避各种自然障碍的图像获取技术应该成为研究重点。目前来看,除了利用桥面行驶的智能化桥梁检测车外,利用无人机平台也是一个较有价值的技术途径。
(2)复杂背景下细小裂缝的自动化识别理论与算法。混凝土桥梁结构要求能识别出小于0.2 mm的细微裂缝,这种细小裂缝对于结构表面的腐蚀、析白、剥落、划痕、拼缝与水迹等干扰物而言,都属于不显著微小目标,识别难度将远远大于隧道0.2 mm以上、道路毫米级裂缝识别的难度,传统的裂缝识别方法目前难以解决该问题,应该发展新的理论与算法。
[1]向容,曾宏,张斯涵,等.浅谈现代桥梁的稳定性与检测[J].港澳经济, 2014(32):112-113.
[2] 王文超.图像处理技术在桥梁外观检测中的应用[J].天津建设科技,2008(S1):20-22.
[3]Oh J K,Lee A Y, Oh S M. Design and Control of Bridge Inspection Robot System[C]∥Proceedings of the 2007 IEEE International Conference on Mechatronics and Automation,2007:3634-3639.
[4]刘沐宇,袁卫国.桥梁无损检测技术的研究现状与发展[J].中外公路,2002(6):34-37.
[5]丁志军,杜军,卢彭真.无损检测技术在道桥工程中的应用与发展[J].交通科技与经济,2005(1):4-6.
[6] 卢彭真,葛蔚敏,楼茂森.无损检测技术在道桥中的应用与发展[J].公路交通技术,2004(6):56-59.
[7] 李颖,张廉,唐颖栋.桥梁结构无损检测与评估研究进展[J].中外公路,2009(1):147-153.
[8]王景全,赵启林.桥梁混凝土裂缝分布式、非接触检测技术[C]∥中国土木工程学会桥梁及结构工程分会.第十九届全国桥梁学术会议论文集,北京:人民教育出版社,2010.
[9]高潮,李新科,郭永彩,等.桥梁拉索表面缺陷的机器视觉检测系统[J]. 中国科技论文在线,2011(10):775-780.
[10] 李新科,高潮,郭永彩,等.桥梁拉索表面缺陷的分布式机器视觉检测[J].光学技术,2013(5):424-428.
[11] 周波,杨小帆,王磊.基于模式识别的桥梁故障检测[J].计算机与数字工程,2010(4):173-175.
[12] 王文超.图像处理技术在桥梁外观检测中的应用[J]. 天津建设科技,2008(S1):20-22.
[13]Cord,A,Chambon S. Automatic Road Defect Detection by Textural Pattern Recognition Based on AdaBoost[J]. Computer-Aided Civil and Infrastructure Engineering,2012,27(4):244-259.
[14]Lee J H,Lee J M,Kim H J,et al. Machine Vision System for Automatic Inspection of Bridges[J]. Congress on Image & Signal Processing,2008(3):363-366.
[15] 曾燕华.基于计算机视觉的桥梁表面缺陷检测技术研究[D].广州:广东工业大学.2005.
[16]卢晓霞.基于图像处理的混凝土裂缝宽度检测技术的研究[D].成都:电子科技大学,2010.
[17] 宋平丽.基于视频图像的桥梁裂缝检测[D].武汉:武汉理工大学,2010.
[18] 张国旗.基于图像处理的混凝土桥梁底面裂缝检测方法的研究[D].北京:北京交通大学,2010.
[19] 周传林.图像处理技术在混凝土桥梁裂缝检测中的应用研究[J].筑路机械与施工机械化,2014(2):74-77.
[20] 李刚等,远距离混凝土桥梁结构表面裂缝精确提取算法[J].中国公路学报,2013(4):102-108.
[21]赵启林,冯兆祥,吉林,等.基于数码摄像技术的桥梁检测仪系统:中国,200520068675[P].2006.
[22]用于桥梁检测的BIREM爬墙机器人[EB/OL].(2013-12-23)[2015-05-12]http://b2b.21csp.com.cn/c22/201312/ 2020486.html.
[23]戴启凡.桥梁检测爬壁机器人及其自适应控制技术研究[D].南京:南京理工大学,2010.
[24] 杨衍舒.桥底检测爬壁机器人控制系统开发[D].南京:南京理工大学,2013.
[25] 付宜利,李志海.爬壁机器人的研究进展[J].机械设计,2008,25(4):1-5.
[26]王连波.浅谈无人机的发展现状及发展趋势研究[J].科技与企业,2013(14):349.
[27]王小莉.面向桥梁检测的四旋翼飞行器控制系统研究[D].重庆:重庆交通大学.2013.
[28]黄海峰.多轴飞行器在公路桥梁检测中应用展望[C]∥中国公路学会养护与管理分会.2013年全国公路养护技术学术年会论文集,北京:人民教育出版社,2014.
[29]吴军.计算机在桥梁检测中的应用[J].科技资讯,2013(32):28.
[30]张维峰,刘萌,杨明慧.基于数字图像处理的桥梁裂缝检测技术[J].现代交通技术,2008(5):34-36.
[31]郝晓静.路面裂缝自动检测系统研究[D].西安:长安大学,2013.
[32]朱鑫.隧道结构表面病害特征快速检测研究[D]. 2014,成都:西南交通大学,2014.
[33] 尹冠生,赵振宇,徐兵.基于图像处理的桥梁裂缝检测技术[J]. 四川建筑科学研究,2013(2):125-128.
[34]王玮华.基于图像处理技术的桥梁裂缝检测[D].西安:长安大学,2013.
[35]Yamaguchi Tomoyuki, Shingo Nakamura, Shuji Hashimoto. An efficient crack detection method using percolation based image processing[C]∥3rd IEEE Conference ,2008:1875-1880.
[36]段一平,李浩攀.MATLAB在图像处理中的应用[J]. 科技信息,2009(10):213-214.
[37]刘晓瑞,谢雄耀.基于图像处理的隧道表面裂缝快速检测技术研究[J].地下空间与工程学报,2009(S2):1624-1628.
[38]刘学增,桑运龙,苏云帆.基于数字图像处理隧道渗漏水病害检测技术[J].岩石力学与工程学报,2012(S2):3779-3786.
[39]黄卫岭.基于图像处理技术的桥梁裂缝测量系统研究[D].北京:北京交通大学,2013.
[40]吴欢欢.混凝土裂缝图像测量系统研究与开发[D].南京:南京航空航天大学,2013.
[41]王平让,黄宏伟,薛亚东.基于图像局部网格特征的隧道衬砌裂缝自动识别[J].岩石力学与工程学报,2012(5):991-999.
[42]蒋翠翠,李明.浅析基于MATLAB的图像分割方法[J].电脑与电信,2010(6):68-70.
[43]陈利利.基于多尺度图像分析的路面病害检测方法研究与分析[D].南京:南京理工大学.2009.
[44]胡文锦.图像边缘检测方法研究[D].北京:北京交通大学,2000.
[45]曾俊,图像边缘检测技术及其应用研究[D].华中科技大学,2011.
[46]农海啸.基于MATLAB的数字图像边缘检测算子的实验对比研究[J].南宁师范高等专科学校学报,2008(2):129-131.
[47]黄锋华,刘琪芳,冀金凤.基于MATLAB数字图像边缘检测算子的研究[J].机械工程与自动化,2011(04):48-50.
[48]张宏,董安国,徐志刚,等. 种子游走算法及其在桥梁裂缝检测中的应用[C]∥Proceedings of 2010 The 3rd International Conference on Power Electronics and Intelligent Transportation System, 2010.
[49] 高建贞,陆建峰,赵春霞,等.基于多级拟合的道路病害自动检测与识别[J]. 计算机工程与应用,2004(22):220-223.
[50] 王晨.路面病害自动检测系统的改进和相关算法的研究[D].南京:南京理工大学.2006.
[51]高建贞.基于图像分析的道路病害自动检测研究[D].南京:南京理工大学,2003.
[52]张国旗,基于图像处理的混凝土桥梁底面裂缝检测方法的研究[D]. 北京:北京交通大学,2010.
[53]Hong L,Salari E,Chou E. Pavement information system:Detection,classification and evaluation[C]∥IEEE International Conference on Electro/information Technology, 2010:1 - 5.
[54] Tien Sy Nguyen,Stephane Begot,Florent Duculty,et al. Freeform anisotropy:A new method for crack detection on pavement surface images[C]∥18th IEEE International Conference on Image Processing,2011.
[55]柳赟,郑蕊蕊,吴艳军,等.基于BP神经网络的彩色图像边缘检测方法研究[J].电子测试,2013(19):100-101.
[56]杨景兵,丁辉,张树东.基于神经网络的图像弱边缘检测方法研究[J].电视技术,2011(15):54-56.
[57]邓若曦.基于图像分析的路面裂纹自动检测算法研究[D].武汉:武汉理工大学,2012.
[58]张福新,李国东.基于细胞神经网络的桥梁裂痕诊断研究[J].大众科技,2014(1):26-29.
[59]Xu Guoai,Ma Jianli,Liu FanFan,et al. Automatic Recognition of Pavement Surface Crack Based on BP Neural Network[C]∥International Conference on Computer and Electrical Engineering,2008.
[60]应培红.计算机图像处理技术在桥梁检测中的应用[J].技术与市场,2011(8):115.
[61]吴轩.智能桥梁检测车工作臂定位与避障控制的研究[J].长沙:湖南大学,2011.
[62]郭健,顾正维,孙炳楠,等.基于小波分析的桥梁健康监测方法[J].工程力学,2006(12):129-135.
[63]邹大鹏.智能视频桥梁检测车工作臂避障系统的研究[J].广州:广东工业大学,2005.
[64]刘亚双.数字图像方法在桥梁检测中的应用[D].天津:天津大学,2007.
[65]夏巨武.基于数字图像处理的桥梁裂缝测量应用研究[D].成都:西南石油大学.2011.
[66]姚冰,赵启林,芮挺,等.非接触式检测混凝土桥梁裂缝的测距法[J].中国市政工程,2009(3):38-40.
猜你喜欢
数学物理学报(2022年5期)2022-10-09
石油与天然气地质(2021年3期)2021-06-29
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年1期)2021-03-29
少儿美术(快乐历史地理)(2020年5期)2020-09-11
应用数学(2020年2期)2020-06-24
湖南教育·A版(2019年4期)2019-05-10
小学生学习指导(低年级)(2019年4期)2019-04-22
意林·全彩Color(2018年7期)2018-08-13
山东工业技术(2016年15期)2016-12-01