RoboCup中型组机器人教练机系统设计
2015-04-02 14:28蔡宗琰王晶张山吴彬何文博
无线互联科技 2015年2期
蔡宗琰 王晶 张山 吴彬 何文博

摘 要:足球机器人比赛中型组采用分布式通信方式[1],参考实际足球比赛规则,对机器人的教练机系统进行设计,并对所编写通信网络系统程序进行实验验证,得出了该网络系统通信的正确行和可靠性。
关键词:分布式;通信网络;实验验证
足球机器人比赛中型组采用分布式通信方式是人工智能技术的重要验证平台,而其中通信网络系统是该比赛系统的重要支撑技术,也是整个足球机器人控制设计[2]中最基本的环节。因此,对通信网络的研究,对于整个机器人设计中有着重要意义。
1 机器人通信网络系统的基本结构
依照足球机器人比赛规则,以及网络通信的基本工作原理。通信网络系统的示意图如图1所示。
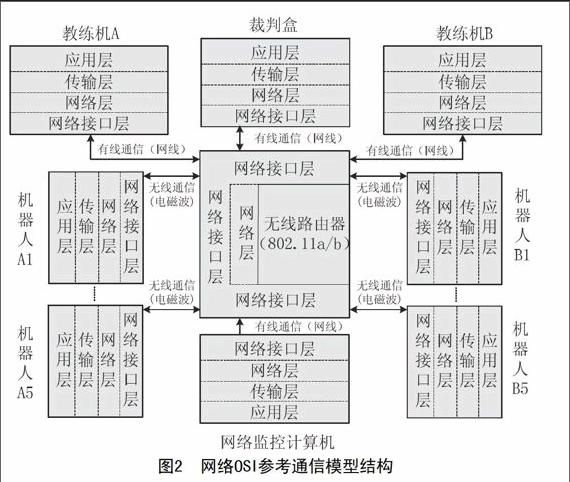
按照该通信的基本原理,结合网络OSI参考通信模型[3],设计出比赛通信网络系统的结构。其网络OSI参考通信模型结构如图2所示。
在机器人网络通信中,数据传输过程为裁判盒将指令通过路由器传给教练机。教练机再通过路由器传给机器人,机器人将状态信息通过路由器传给教练机。教练机再将部分信息通过路由器转给裁判盒完成通信过程。
2 教练机系统
2.1 教练机系统功能模型
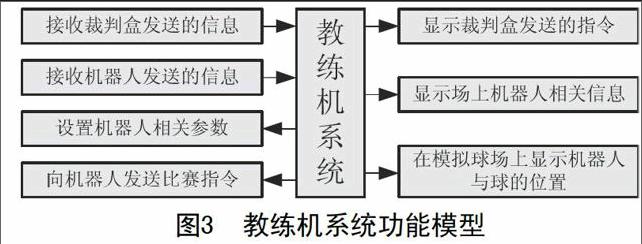
在机器人网络系统设计中教练机系统设计十分重要[4],首先,该教练机系统应当可以接受裁判盒发送的指令信息,并显示和发送该指令。其功能模型如图3所示。
裁判盒发给教练机的指令信息为真实足球场上,所能遇到的所有可能出现的控制信息。其比赛指令如图4所示。
裁判盒应具有以上所有指令信息,连接网络状态以及场上机器人的部分状态信息。因此,裁判盒程序的操作界面如图5所示。
2.2 教练机连接裁判盒功能的设计
教练机连接裁判盒的连接建立有着很重要的作用,是控制通信的基础,通过网络建立,裁判盒的选择,通信用户的加入,网络的配置,端口的检查,人机界面的教练机和裁判盒的状态先显示,来完成,教练机和裁判盒的连接建立。其流程图如图6所示。
2.3 教练机接收裁判盒信息函数的设计
教练机信息接收的设计要初始化网络连接状态,并进行筛选出自己方的球队,进行球队编码,接收裁判盒指令并将该指令传给场上的各个球员。信息流程图如图7所示。
2.4 教练机接收并显示机器人发送的信息功能的设计
教练机接收场上机器人的信息并进行控制功能实现,分为了与机器人通信[5]的建立和接收信息的处理与显示。
2.4.1 与机器人通信的建立
先要创建网络连接,进行存储接口设定,网络进行通信地址参数设定,加入通信用户,存储单元设定,网络工作环境初始化。流程如图8所示。
2.4.2 接收信息的处理与显示
接收总的机器人的信息,进行判断己方机器人,进行数据分类处理,分别显示在人机交互界面上。其数据流程如图9所示。
2.5 教练机系统界面设计
教练机系统界面设计包括:球队颜色分类设定[6]、球门方向设定;机器人在场上位置设置以及机器人角色设置;手动控制球员,机器人发球类型设置,比赛开始与停止命令的发送功能,显示裁判盒发送的指令功能和发送状态,显示教练机发送的指令功能和发送状态,显示场上机器人信息功能和运行状态。整体界面图如图10所示。
3 通信网络程序检测实验
所谓的通信网络程序检测试验,就是通过试验检测所设计的程序是否可以满足通信的功能并显示机器人的,位置,状态等信息。
3.1 实验过程
试验设备:一台电脑,两台机器人、一个无线路由器、一条网线等。
首先,将机器人和电脑分别和路由器相连。然后,运行编写好的教练机程序。操作教练机观察并记录运行过程,以及显示结果。
3.2 实验结果
教练发送指令后,机器人进行执行相应的动作并上传相应状态信息。教练机的接受该信息并显示如图11所示。
通信实验记录如表1、表2所示。
3.3 实验结果分析
从实验结果可以得到,机器人接受到指令概率为99%。准确动作概率为100%。这表明该教练机程序设计,是可以满足通信要求的,但有数据丢失,应当在进行改善设计。
[参考文献]
[1]孙迪生,王炎.机器人控制技术[M].北京:机械工业出版社,1997.
[2]李实,徐旭明,叶榛,等.国际机器人足球比赛及其相关技术[J].机器人,2000,22(5):420-426.
[3]于新奇.OSI参考模型与TCP/IP模型的异同及关联[J].中国西部科技,2009.
[4]Asada M.,Kitano H.,Noda I.,et al.RoboCup:Today and Tomorrow-What we have learned[J].Elsevier Science,1999.8,28.
[5]Santos F.,Almeida L.,Lopes L. S.,et al.Communicating among Robots in the RoboCup Middle-Size League[A].Goeble R.,Siekmann J.Wahlster W..RoboCup 2009:Robot Soccer World Cup XIII[C].Germany Springer-Verlag Berlin Heidelberg, 2010:320-331.
[6]Candea C.,Hu H.S.,Iocchi L.,et al.Coordination in multi-agent RoboCup teams[J].Robotics and Autonomous Systems,2001,36(2-3):67-86.
猜你喜欢
制导与引信(2017年3期)2017-11-02
中国新通信(2016年21期)2017-01-06
中国新通信(2016年21期)2017-01-06
自动化博览(2014年12期)2014-02-28
汽车电器(2014年5期)2014-02-28