
基于多体理论的两轴光电转台结构误差分析
2015-03-23 06:07刘宏旭任珂珂
激光与红外 2015年10期
刘宏旭,任珂珂
(华北光电技术研究所,北京100015)
1 引言
两轴光电转台结构形式多样,按照外框轴线相对于大地坐标系的空间位置不同,可以分为立式和卧式两种基本结构。相比卧式转台立式,转台具有结构紧凑,传感器无遮挡,两轴转动角度容易解耦等特点,被广泛应用于地面防空、水面探测、航空侦察、激光对抗与激光通信等领域。指向精度是由转台决定的负载光轴空间姿态的精确度,是转台精度的重要指标,随着光电转台应用深度和广度的不断扩展,对指向精度的要求也在不断提高。为了满足精度要求,需要对转台进行完整的误差分析,建立正确的误差模型,分析各种误差对转台精度的影响,从而进行合理的误差分配。
影响光电转台指向精度的误差项,主要有:
1)结构误差,由于转台的机械零部件的不精确和变形所引起的误差,包括几何误差(由于零件加工和装配过程中的误差累计而成的误差),运动误差(由于轴承等运动元件的不精确所引起的误差),变形误差(由于零部件受力、受热等原因造成的变形所引起的误差)等。
2)控制误差,由于电路软硬件所引起的误差,包括传感器误差和零位误差、控制算法误差等。
3)其他误差,由于其他因素所引起的误差,包括环境振动误差、检定仪器误差等。
其中,结构误差是影响指向精度的主要因素,可以被测量,其中部分误差项还可以通过一定方法标校和补偿。本文以两轴立式光电转台作为研究对象,针对它的各项结构误差,使用多体系统运动学理论进行误差分析和误差建模,使用数学软件进行误差仿真试验,从而分析转台结构误差对指向精度的影响。
2 多体系统误差建模理论
多体系统是对多刚体或柔体通过某种形式连接的工程对象的概括和抽象,是分析和研究机械系统的最优模型形式,任何机械系统都可以通过概括和抽象,提炼成为多体系统[1]。拓扑结构是对多体系统本质的高度提炼和概括,采用较低序号物体阵列(简称低序体阵列)来描述多体系统拓扑结构,可以将复杂的机械结构抽象成为简单体的形式,把它引申到坐标描述的计算过程,可以推导出系统的运动学表达式,是多体系统运动学计算机算法的基础[2]。对于任意多体系统,一般设大地惯性参考坐标系为零号体,创建系统拓扑结构和结构低序体阵列,多体系统中的任意个体都可以通过低序体阵列追溯到惯性参考系中,得到它在大地坐标系中的位置和姿态表达式。在实际情况下,相邻体间的变换矩阵是在理想情况的变换矩阵基础上引入误差量,同时考虑位置误差与位移误差对运动的影响,得到多体系统中任意典型体上给定点在大地惯性坐标系中的位置与位移,和给定直线段在大地惯性坐标系中的空间姿态。
3 转台结构误差分析与误差建模
3.1 转台结构误差项分析
根据两轴光电转台的误差特点,结合误差检测方法,将转台的各项结构误差分为两大类:
3.1.1 静态误差
静态误差是相对固定的系统误差,同时也是可以检测并且通过标校等方法在一定程度上补偿的。转台静态误差主要包括:垂直度误差、相交度误差及设备安装误差。

3.1.2 动态误差
3.2 转台结构误差建模
两轴光电转台在运动学上属于串联式结构,通过分析组成结构,得到其拓扑结构如图1所示。
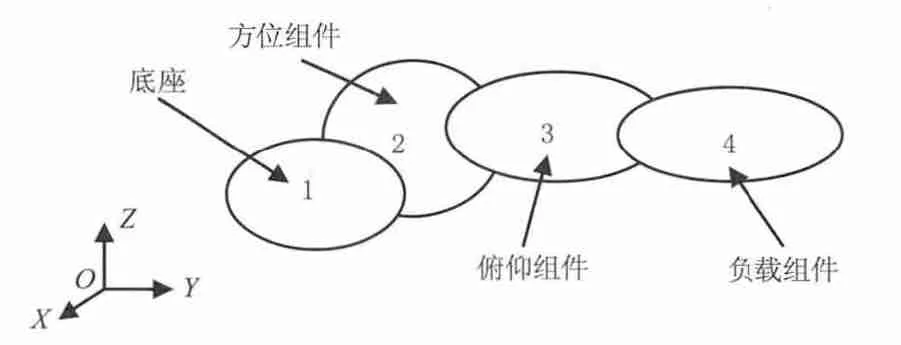
图1 两轴立式转台拓扑结构图Fig.1 Topology structure of two-axis vertical turntable
3.2.1 转台坐标系的建立
根据转台的拓扑结构图,在每个典型体上的建立理想参考坐标系与实际参考坐标系:
1)大地惯性坐标系(CS0)
此坐标系与大地固连,坐标原点位于基座安装平面的中心,方向选择东北天坐标系设置,X轴正向为正东方,Y轴正向为正北方,Z轴正方向垂直地面向上。
2)底座理想坐标系(CS1)与底座实际坐标系(CS1')

3)方位轴理想坐标系(CS2)与方位轴实际坐标系(CS2')

4)俯仰轴理想坐标系(CS3)与俯仰轴实际坐标系(CS3')

5)负载理想坐标系(CS4)与负载实际坐标系(CS4')

3.2.2 转台误差模型
理想情况下,负载理想坐标系相对于大地惯性坐标系的变换矩阵为:
[A04]ideal= [A01]p[A01]s[A12]p[A12]s[A23]p[A23]s[A34]p[A34]s
在实际情况下,考虑转台各项结构误差,负载实际坐标系相对于大地惯性坐标系的变换矩阵为:
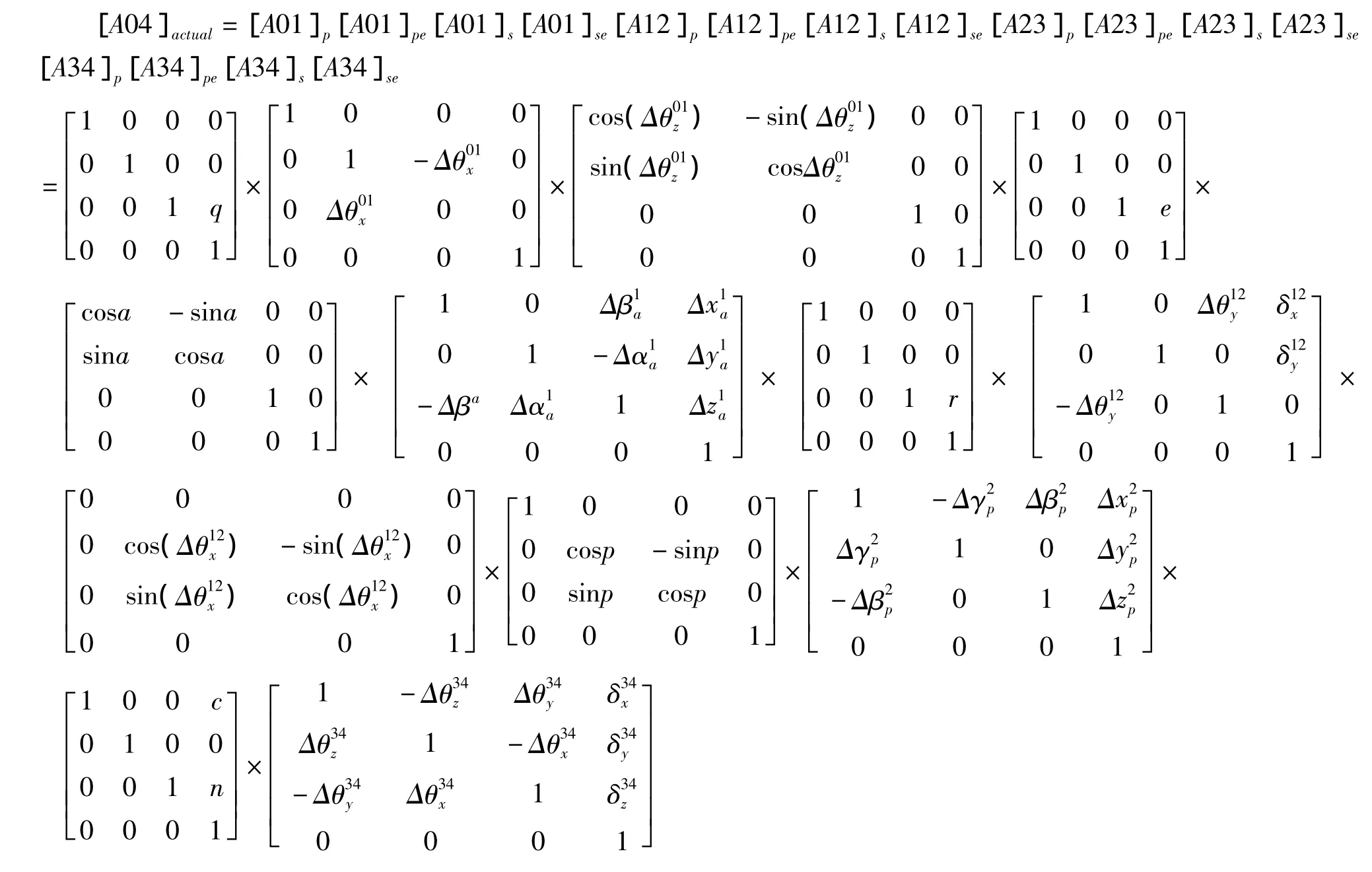
转台的光电负载上给定点P在惯性坐标系中的位置误差矢量Δp0为:

其中,{p4}为给定点p在负载坐标系中的位置矢量。
4 转台结构误差仿真

图2 某型光电转台的指向误差曲面图Fig.2 Pointing error curved surface of an optic-electric turntable
4.1 静态误差对指向精度的影响
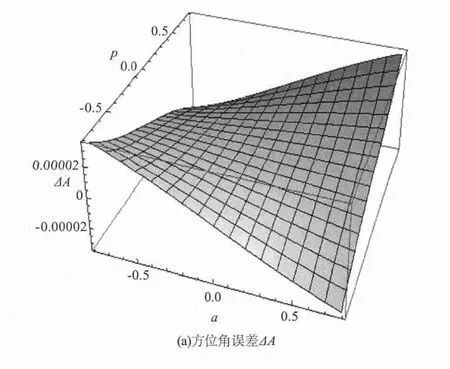
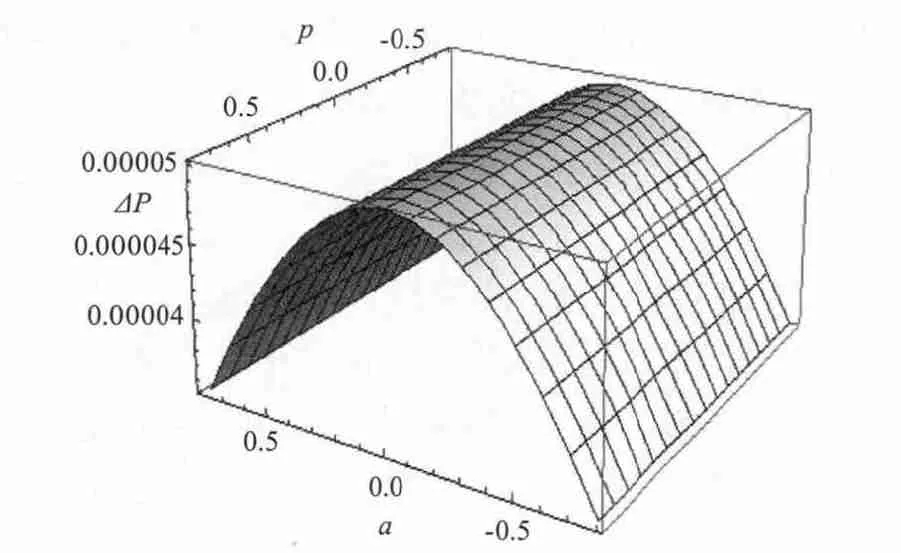
图3 设定静态误差项的转台指向误差曲面图Fig.3 Pointing error curved surface of the turntable setting static error
4.2 动态误差对指向精度的影响

图4 设定动态误差项的转台指向误差曲面图Fig.4 Pointing error curved surface of the turntable setting dynamic error
5 结论
1)以两轴立式光电转台为研究对象,基于多体运动学理论,对转台的各项结构误差进行分析,从而建立了转台结构误差模型。
2)根据转台结构误差模型,借助Mathematica数学软件以某型转台各误差测量值为原型,进行指向精度误差数值仿真,并给出误差曲面图,作为指向精度实测的预期值,为以后的测量试验做好准备。
3)分别对转台方位轴静态垂直度误差和俯仰轴动态误差对指向精度的影响进行数字仿真,并对仿真结果进行分析发现,方位轴垂直度误差对指向精度的方位角误差和俯仰角误差都有影响,俯仰轴动态误差对指向精度的方位角误差有一定影响而对俯仰角误差基本没有影响。
4)根据转台结构误差模型可以对类似结构的不同精度转台进行误差仿真分析,在设计阶段可以更准确地对各项结构误差源进行误差分配。
5)单独分析转台的结构误差显然是不全面的,但作为转台的主要误差源,对它进行的建模分析和误差仿真,在设计阶段同控制误差一起对于转台精度的评估是有帮助的。
[1] Houston R I,LIU You-wu.Multi-body System Dynamics[M].Tianjin:Tianjin University Press,1991.(in Chinese)休士顿 R I,刘又午.多体系统动力学[M].天津:天津大学出版社,1991.
[2] LIU You-wu,LIU Li-bing,ZHAO Xiao-song,Numerical control machine tool error compensation technology research[J].China Mechanical Engineering,1998,9(12):48-52.(in Chinese)刘又午,刘丽冰,赵小松.数控机床误差补偿技术研究[J].中国机械工程,1998,9(12):48-52.
[3] The committee of science technology and industry for national defense[S].GJB 1801-1993.Testing methods of major performance for test equipments of inertial technology,Beijing:national defense science and technology commission,1993.(in Chinese)国防科学技术工业委员会,GJB 1801-1993.惯性技术测试设备主要性能试验方法[S].北京:国防科学技术委员会,1993.
[4] TIAN Xue-guang,Study of Key Techniques on mapping Camera Calibration Turntable Structure System[D].Changchun:Chinese Academy of Science Changchun Institute of Optics,Fine Mechanics and Physics,2010.(in Chinese)田学光.测绘相机标定转台结构系统关键技术研究[D].长春:中科院长春光学精密机械与物理研究所,2010.
[5] WU Xue-tong,Yan Feng,ZHAO Rui-feng,Analysis on Data Accuracy of Two-axis Four-frame Stabile Platform Optronic System Derived from Axis Error[J].optical and optoelectronic technology,2011,19(5):89-92.(in Chinese)吴学铜,闫峰,赵瑞峰.结构误差对两轴四框架光电数据输出精度影响分析[J].光学与光电技术,2011,19(5):89-92.
[6] LI Yan,FAN Da-peng,Error Analysis of Three-axis Turntable Aimed at Assembling Based on Multi-system Kinematics Theory[J].Acta Armamentarii,2007,28(8):981-987.(in Chinese)李岩,范大鹏.基于多体系统运动学理论的三轴转台装配误差建模分析[J].兵工学报,2007,28(8):981-987.
[7] MU Yuan-dong,LI Li-ren,Analysis of Vehicleborne Turntable’s Key Parts[J].Laser & Infrared,2008,38(7):705-707.(in Chinese)穆远东,李立仁.车载转台关键部件结构分析[J].激光与红外,2008,38(7):705-707.
[8] SI Li-na,Gao Yun-guo,NIE Xiao-qian,Design and analysis of the four-way body for a two-axis tracking system with highprecision[J].Laser & Infrared,2010,40(10):1106-1110.(in Chinese)司丽娜,高云国,聂晓倩.高精度二轴跟踪系统四通结构的设计与分析[J].激光与红外,2010,40(10):1106-1110.
猜你喜欢
中学生数理化·八年级物理人教版(2023年3期)2023-03-21
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
传媒评论(2017年8期)2017-11-08
中等数学(2017年2期)2017-06-01
小学科学(学生版)(2016年1期)2016-10-09
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
