
最新SMOS卫星海表盐度L3/4级产品的误差分析
2015-03-22 02:36:20路泽廷朱江韩君元慧慧
海洋通报 2015年4期
路泽廷,朱江,韩君,元慧慧
(1.中国科学院大气物理研究所,北京 100029;2.中国科学院大学,北京100049;3.中国人民解放军61741 部队,北京 100094)
海表盐度在大洋环流、海气相互作用等全球大气、海洋过程中起着重要作用。一方面,海表盐度影响制约着障碍层形成、深层水团形成、温盐环流等海洋物理过程;另一方面,作为海气交界面处的关键要素,海表盐度的季节和年际变化同ENSO 等海气相互作用现象息息相关,是理解和预测气候变化必须的信息(Jordi et al,2010; Chen et al,2014;陈建,2014)。
在2009年以前,海表温度、海面高度、海洋水色、海冰、海风、海浪、海流等几乎所有的海面要素都实现了遥感观测,盐度是唯一未实现从太空进行遥感监测的海面关键要素,这主要是由于星载辐射计观测的辐射亮温对于盐度的变化敏感度过低。鉴于盐度在海洋科学研究中的重要性,盐度现场观测资料无论在时间连续性,还是空间分辨率上都远远不能满足科学研究的需要(Jean-Luc Vergely et al,2014;CP34,2008;Jordà,2011;Martin-Neira et al,2011; Yin et al,2011)。进入21 世纪以来,随着遥感探测、计算机技术、数据通信以及大气和海洋科学等各领域诸多新技术的进步,盐度的卫星遥感条件基本成熟。到今天为止,已经有2 颗盐度遥感卫星发射成功,包括2009年11月欧洲空间局(ESA) 发射的SMOS(土壤湿度和海洋盐度) 卫星,以及2011年6月发射的由美国航空航天局(NASA) 和阿根廷航天局(CONAE) 联合开发的水瓶座(Aquarius/SAC-D)卫星(Benoît et al,2008)。二者的工作频率都在对盐度变化相对最敏感的L 波段。其中,SMOS 卫星已在轨运行4年多,相比水瓶座卫星积累了更长时间的资料,其资料反演算法也经过几个项目组的艰苦努力,得到不断的改进,并于近期推出了经过再处理的质量更优的多种海表盐度产品(CATDSCECOS, 2011, 2012; Barcelona Expert Center,2014a,2014b)。因此,本文主要对SMOS 卫星资料进行分析。
尽管,全新的SMOS 卫星遥感海表盐度资料具有难以替代的科学价值,但由于L 波段亮温对盐度变化的敏感率很低,以及银河系辐射、无线电频率干扰、太阳污染、陆地污染、海冰污染、海面粗糙度的不准确等各种因素导致的噪音量级几乎与信号相当,因此盐度遥感非常困难,算法很复杂,误差因素很多。因此,目前的卫星海表盐度资料的精度与现场盐度观测资料相比,还有不小的差距。但由于其时空分辨率较高,且分布均匀、连续,因此可以大大弥补现场观测资料的不足(CATDSCECOS,2011; Jordà et al,2010; Reul et al,2011; Boutin et al, 2012; Brassington et al,2009)。
要对这种新资料进行充分有效利用,将其同化到海洋模式中,改善海洋预报的初值、提供更为准确的海洋再分析资料,是一种重要的渠道。但在对其进行同化之前,深入了解其误差分布特征很有必要。本文的目的,就是对最新发布(经过再处理)的几种SMOS 海表盐度资料L3/4 级产品进行统一的检验和比较,了解其误差分布特征,分析误差原因,为下一步对其进行同化做必要的准备,也为使用该资料的其他学者提供有益的参考。
1 资料和方法
1.1 SMOS 卫星海表盐度资料
本文检验的SMOS 卫星海表盐度资料包括两大类,共5 种。由于2010年5月以前,为SMOS 卫星的试运行阶段,资料质量不太可靠;另外在2010年底有十几天时间,由于技术故障导致资料不可靠(Barcelona Expert Center,2014a)。因此,选取的检验时间段为2011.1-2013.12,对这3年的资料进行检验。
(1) 由BEC(SMOS 西班牙巴塞罗那专家中心)制作,通过CP34(SMOS L3/4 产品处理中心)发布的,经过再处理的新一代SMOS 海表盐度三级和四级产品,共3 种(Barcelona Expert Center,2014b),分辨率相同:9 d 平均、水平分辨率0.25°×0.25°。
3 种产品分别是:
1) 简单加权平均产品(本文中记作BEC_binned),通过对欧洲空间局(ESA) 的L2 级产品经过筛选后,在9 d、0.25°的时空网格内进行加权平均得到,加权平均公式如下:

σi是在L2 产品处理中计算得到的该点观测值SSSi的理论不确定性(标准差),Ri 是对应观测点的信号采集覆盖区(波束照射面积) 的相当直径,N 是该均匀时空网格(目标网格) 内包含的有效L2 级SSS 观测资料个数。
2) 最优插值产品(记作BEC_oi);
以WOA09月平均资料为背景场,对经过筛选的欧洲空间局(ESA) 的L2 级SSS 资料进行最优插值(客观分析),得到更加连续、缝隙更少的均匀格点产品。
3) 使用奇异值分析方法制作的融合产品(记作BEC_fused)。
使用一个高质量的卫星观测物理参数(比如SST) 作为模板变量,对一个噪声量(SSS) 的奇异锋的多重分形结构进行恢复。基于奇异值分析的融合技术,不仅可以用于改善信号水平,还可以提高融合场的时空分辨率(融合场的时空分辨率与模板变量的时空分辨率一致)。
该产品的源数据为L3 级的简单加权平均产品(BEC_binned),因此属L4 级产品。
(2) CATDS/CEC-OS(SMOS 法国L3/4 级产品地面处理中心/海洋盐度专家中心) 处理制作的SMOS 海表盐度L3 级研究产品(第二代),该产品有2 种(CATDS-CECOS,2012):一种是月平均资 料、水平分辨率 1°×1°(本文中记作CEC_mon_1);另外一种是10 d 平均、水平分辨率0.5°×0.5° (本文中记作CEC_10day_0.5)。对这两种资料的检验比较,主要是考察时空分辨率(对二级产品处理时做平均的时间、空间尺度) 对资料质量的影响。
与BEC 产品不同,CATDS/CEC-OS 制作的L3级产品,源数据为欧洲空间局(ESA) 经过再处理的L1B 级产品,而非L2 级。CATDS 基于自己的独立算法,生成EASE 网格上的L1C 产品(不同于ESA/DPGS(欧洲空间局地面资料处理中心) 的ISEA 网格),再由此进一步处理得到自己的L2 级产品。由L2 产品处理得到L3 产品的过程主要是加权平均,没有使用其它SSS 资料,但其预处理(L2 产品的筛选过滤更加严格),加权平均公式也有所不同,如下:
其权重仅仅与观测误差方差成反比,没有考虑波束覆盖范围大小。误差方差来自L2OS 的最小二乘迭代处理过程(包括亮温误差、风速和SST 等辅助资料的误差,对这些误差及其传播进行估计得到)。
1.2 Argo 资料及其处理
本文对于SMOS 海表盐度资料的检验,使用的检验资料主要是Argo 资料。因为,在各类现场观测资料中,Argo 资料的准确度是比较高的,并且自2000年以来Argo 计划的大力开展,Argo 浮标开始大量投放,Argo 资料逐渐成为温盐现场海洋观测的主体。使用单一的一种资料做检验,也避免不同类型资料的误差不同,造成检验结果的不准确和不一致性。本文采用的Argo 资料来自全球Argo资料中心之一、法国海洋开发研究院IFRMER Coriolis 数据中心 (http://www.coriolis.eu.org;Thierry et al,2014)。时间段与所检验的SMOS 资料一致,为2011.1-2013.12。
对于Argo 廓线资料,首先进行严格的筛选,筛选标准包括:
(1) 只选择延时处理或实时处理但经过订正的;
(2) 经度、纬度、深度、盐度质控标记都为最优;
(3) 整条廓线质控标记为优;
(4) 对深度做单调性检查,剔除不单调递增的异常观测;
(5) 第1 层有效观测深度小于6 m;
(6) 每条廓线深度层不少于3 层。
对经过以上筛选的Argo 盐度廓线,统一插值到6 m 层,将其作为海表盐度检验的标准。理论上,SMOS 卫星测得的海表盐度为表皮层(约5 cm)的盐度,所以作为检验标准的现场观测越浅越好,但是由于Argo 资料最表层资料浅于5 m 的数量过少,且部分Argo 浮标在5 m 以上的观测不可靠,因此选择6 m 深度做为统一的检验标准深度。
接下来,对经过上述处理的Argo 海表盐度(SSS) 资料,按照每一种SMOS SSS 资料的时间、空间分辨率,在每个时、空网格单元内做简单的算术平均,得到的平均值即作为该空间网格在该时段平均的海表盐度的真值,对SMOS SSS 资料进行检验。
1.3 检验及插补方法
本文通过将几种SMOS SSS L3/4 级产品与WOA09 气候态资料以及经过上述处理(见1.2 节)的Argo 资料进行比较,分析其误差分布的基本特征,以及几种资料之间的异同,并对误差的不同来源进行分析。首先,以一种SSS 产品为例,通过比较3年平均的SMOS SSS 场与WOA09 SSS,对SMOS SSS 资料的基本特征做一个定性的了解;然后给出SMOS SSS 与对应Argo 资料的偏差的统计频数直方图,计算了其平均值、标准差、偏度系数等基本统计量,对其误差的总体分布情形有个大致的了解;接下来,通过比较法国CATDS/CEC-OS专家中心的两种不同时空分辨率的产品(CEC_mon_1 和CEC_10day_0.5) 的平均偏差和均方根误差,来考察分辨率对资料误差的影响;最后对4 种高分辨率产品进行比较,分析各自的优缺点。
由于Argo 廓线是不均匀分布的,其漂流轨迹也不规则,大洋中很多网格(这里指对应于几种SMOS 资料空间分辨率(0.25°,0.5°,或1°) 的均匀矩形网格) 内无观测或者观测数量不足。大量缺测的存在,一方面造成绘图显示困难,另外要对这些资料进行同化时,需要了解其全场的误差分布特征,因此有必要对计算的SSS 的均方根误差或平均偏差的缺测值进行插补,得到所有海洋网格点的RMSE 场。之所以对均方根误差或平均偏差进行插补,而不是对原始数据进行插补,是因为这样可以清楚地知道哪些网格点SMOS SSS 资料和Argo SSS资料都存在有效数据,而且也可以减小计算量。
插补方法:
1) 该点无缺测,取原值,无需插补;
2) 该点缺测,但周围8 点有有效值,取周围8 点平均;
3) 周围8 点都缺测,取以该点为中心的10°×10°大网格平均;
4) 如果再为缺测,继续扩展到30°×30°大网格平均。
2 结果分析
2.1 总体特征分析
在进行细致的检验之前,首先定性的看一下SMOS SSS 的总体分布特征。不考虑季节变化和更小时间尺度的变率,以CEC_mon_1 资料(见2.1)为例,对2011-2013年3年的SSS 资料进行平均,得到的平均海表盐度(SSS) 场如图1(a) 所示,图1(b) 同时给出了WOA09 的客观分析的气候态年平均海表盐度场。
如图所示,定性地看,SMOS年平均海表盐度场与WOA09 资料非常接近。一些重要的分布特征包括:各大洋从低纬到高纬,盐度的分布都呈现低-高-低相间的纬向带状分布;盐度最大的区域位于副热带的“海洋沙漠”地带,这里温度高、蒸发量大,主要受下沉气流控制,降水较少;在暖池、赤道辐合带(ITCZ) 和南太平洋辐合带(SPCZ) 的平均位置附近,因降水丰富,平均盐度较小;高纬地区由于温度低,蒸发量小,盐度也低;三大洋相比,大西洋盐度最高。其它,还比如相邻的阿拉伯海的高盐与孟加拉湾的低盐的鲜明对比,亚马逊河口冲淡水的低盐区,赤道东太平洋向西北延伸的淡水舌,等等。但是,也有一些地方存在显著的差异,比如南极洲沿岸,SMOS SSS 显著偏低,这可能是“陆地污染”(land contamination,由陆地和海洋的不同辐射特性造成) 和“海冰污染”(icecontamination,由海冰和海洋的不同辐射特性引起) 造成的,但另一方面由于那里现场观测极其稀少,WOA09 资料的可靠性也值得怀疑;其他还比如,东中国海和日本海,SMOS SSS 明显偏高,这主要是陆地污染和无线电频率干扰引起的误差所致(Martin-Neira et al,2011; CATDS-CECOS,2012)。另外,由于SMOS 数据与WOA09 数据的时间跨度不同,SMOS 数据为2011-2013年3年平均,WOA09 数据为几十年资料的气候平均,这也是造成二者之间差异的原因之一。
图2 是全球2011-2013年3年的所有SMOS SSS(CEC_mon_1 资料) 与对应Argo SSS 资料的偏差数据的统计频数分布图。由图可见,该偏差的分布接近正态分布,但是比正态分布更加集中,3年的平均偏差为-0.028,接近无偏。该差值(可看作SMOS 资料的误差) 的标准差为0.385,由于平均偏差很小,这个指标接近均方根误差,可以作为SMOS 资料的平均误差的一种度量。偏度系数为-0.96,表明该偏差的分布在平均值左侧更加分散一些,但是分布的非对称性并不显著。
2.2 分辨率的影响
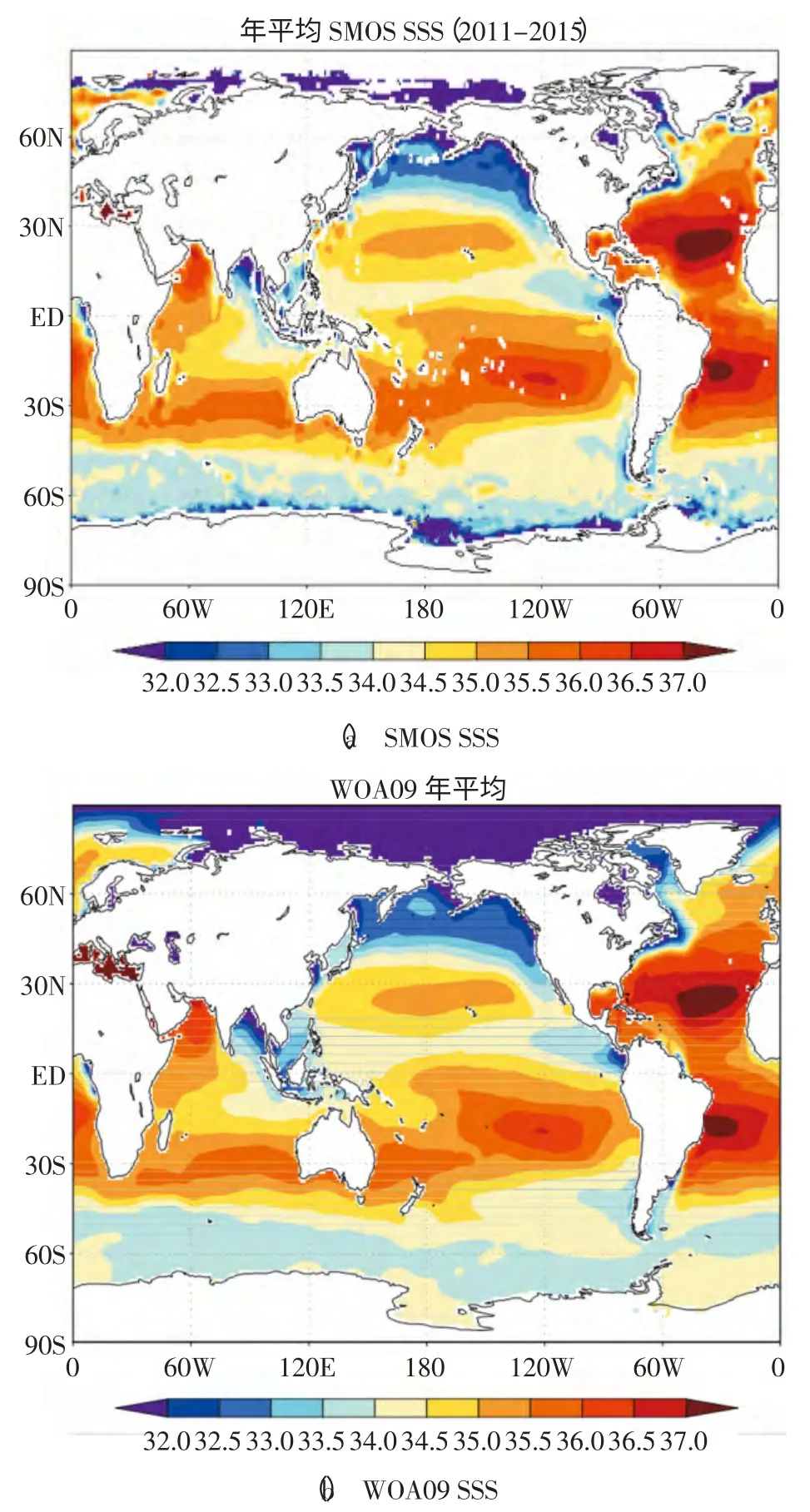
图1 SMOS年平均SSS 与WOA09 气候平均SSS 的比较
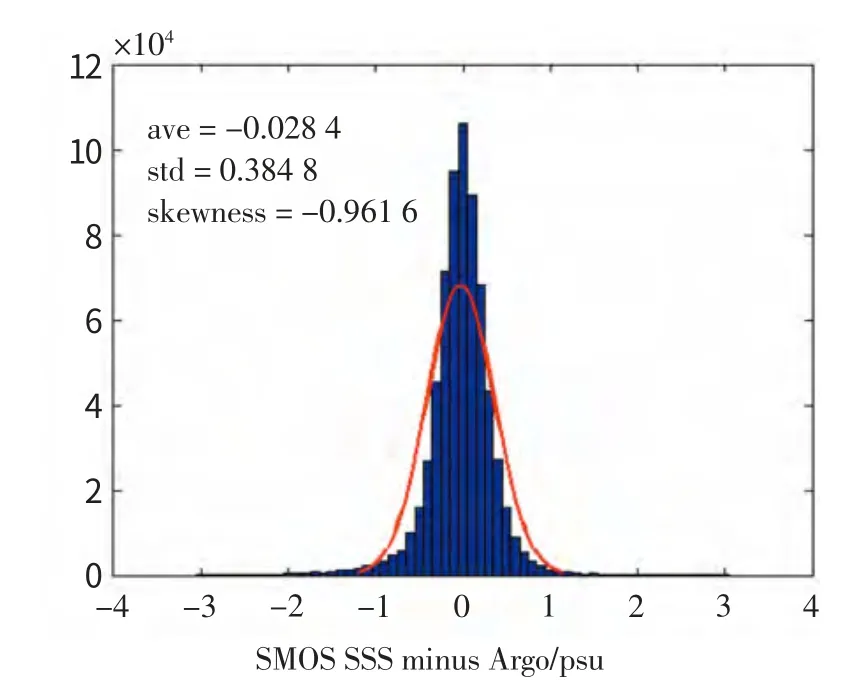
图2 SMOS SSS(CEC_mon_1 资料) 与对应Argo 资料的偏差的统计频数直方图及与之匹配的正态分布曲线
本节通过比较法国CATDS/CEC-OS 专家中心的两种V02 产品(CEC_mon_1 和CEC_10day_0.5),来考察分辨率对资料误差的影响。这两种资料的处理算法、流程相同,只是时间、空间分辨率不同,前者为月平均、水平分辨率1°×1°;后者是10 d 平均、水平分辨率0.5°×0.5°。
由于检验资料Argo 资料为漂流浮标资料,其空间分布是离散的、随机的,对于欧拉坐标系内的固定点来说,其时间分布是不连续的,最终计算得到的均方根误差(RMSE)和平均偏差(BIAS)场,都是不连续的,直接绘图比较,不够直观(图略)。为了看起来更加清晰,采取了两种处理,一是对每个网格点上计算的RMSE 和BIAS 在10°×10°的网格内求平均,另一种是采用1.3 节中提出的方法对缺测点进行插补。两种方法都能得到空间上连续分布的数据,第一种方法能够清晰的勾勒出大概的空间分布特征,第二种则给出了更细节的信息。
图3 和图4 分别给出了这两种方法计算得到的误差分布特征。表1 和表2 则给出了两种CEC 资料的,全球以及三大洋分别计算的,不同纬度带进行平均的均方根误差(RMSE) 和平均偏差(BIAS) 数值(表1 和表2 是对全部有数据的点进行平均得到,没有数据的地方不参与平均)。对于这些结果,综合进行分析。
由图3、图4 和表1、表2 可以看出,随着时空分辨率的降低,均方根误差显著减小,图3 中RMSE<0.2 的范围显著增大。但是平均偏差随时空分辨率的变化不大。其他特征包括:
(1) 大洋中部误差较小,近陆误差大,对于RMSE 和平均偏差绝对值都是如此,RMSE 更加明显(图3、图4);
(2) 三大洋中太平洋均方根误差最小(图3、图4、表1、表2);
(3) 大体上,纬度越高,误差越大,但也不尽然,比如南半球20-40S,40-55S 误差都较小。(图3、图4、表1、表2);
(4) 太平洋和大西洋ITCZ 附近误差相对较大,太平洋ITCZ 附近主要是负偏差,大西洋ITCZ附近以正偏差为主(图4);
(5) 分辨率降低大洋内部RMSE 显著减小,陆地边缘变化不大(图4);
(6) 一般RMSE 小的,BIAS 绝对值也小,有较好的对应关系(图3、图4、表1、表2);
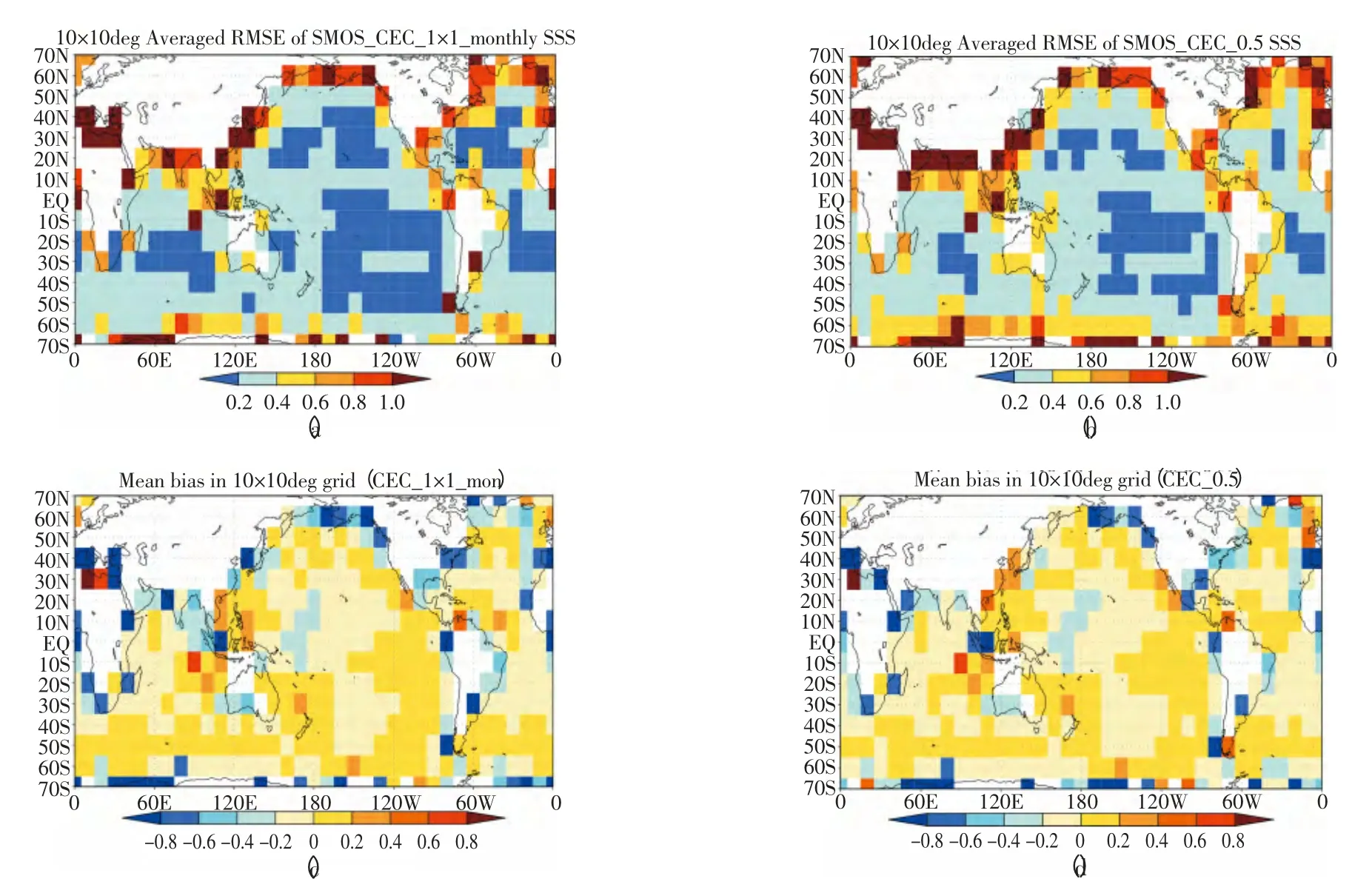
图3 在10 度网格内进行平均处理的两种CEC_SMOS_SSS 资料相对于Argo 资料的均方根误差(RMSE) 和平均偏差(BIAS)
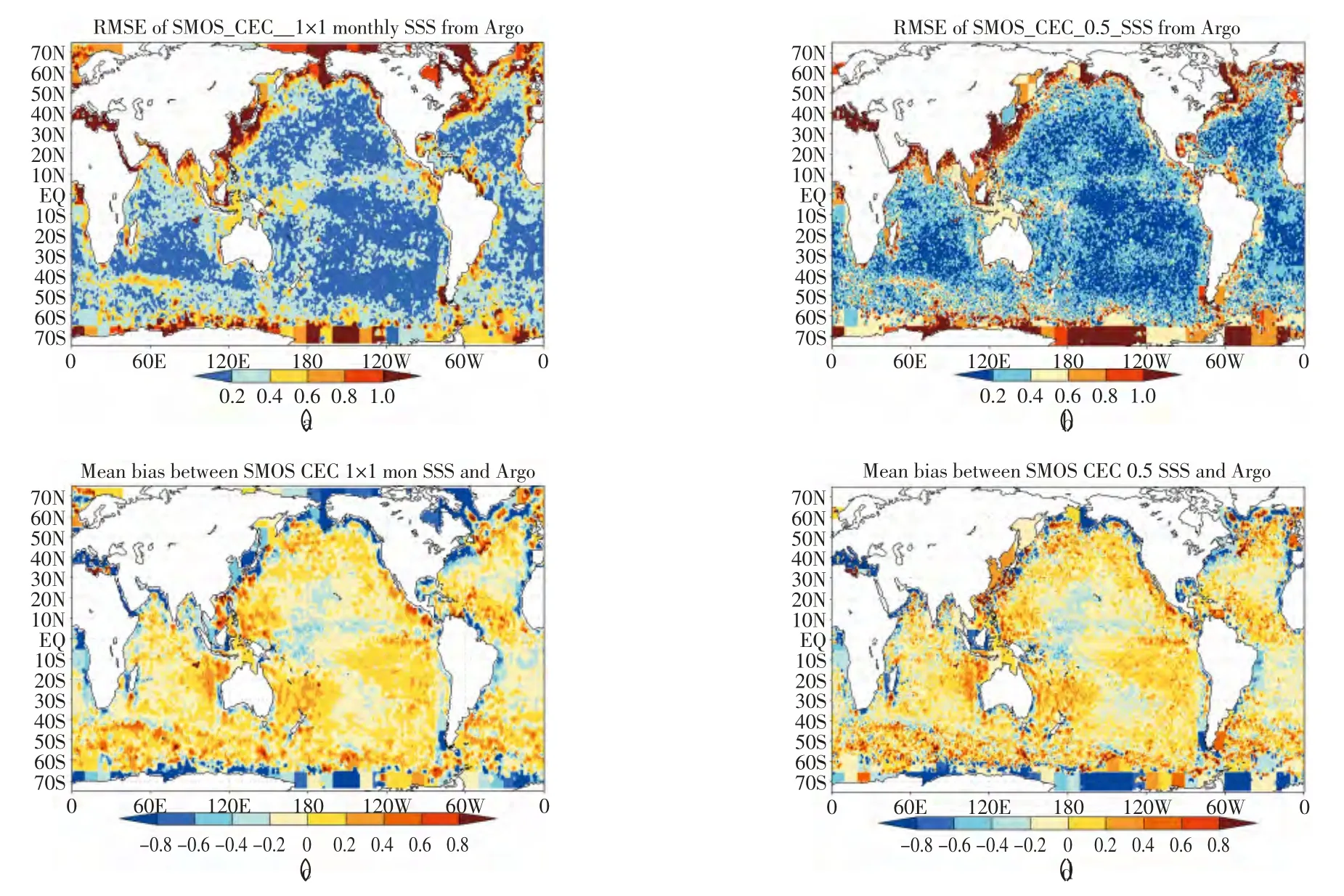
图4 经过插补处理的两种CEC_SMOS_SSS 资料相对于Argo 资料的均方根误差(RMSE) 和平均偏差(BIAS)

表1 CEC_mon_1 资料的分区误差统计表
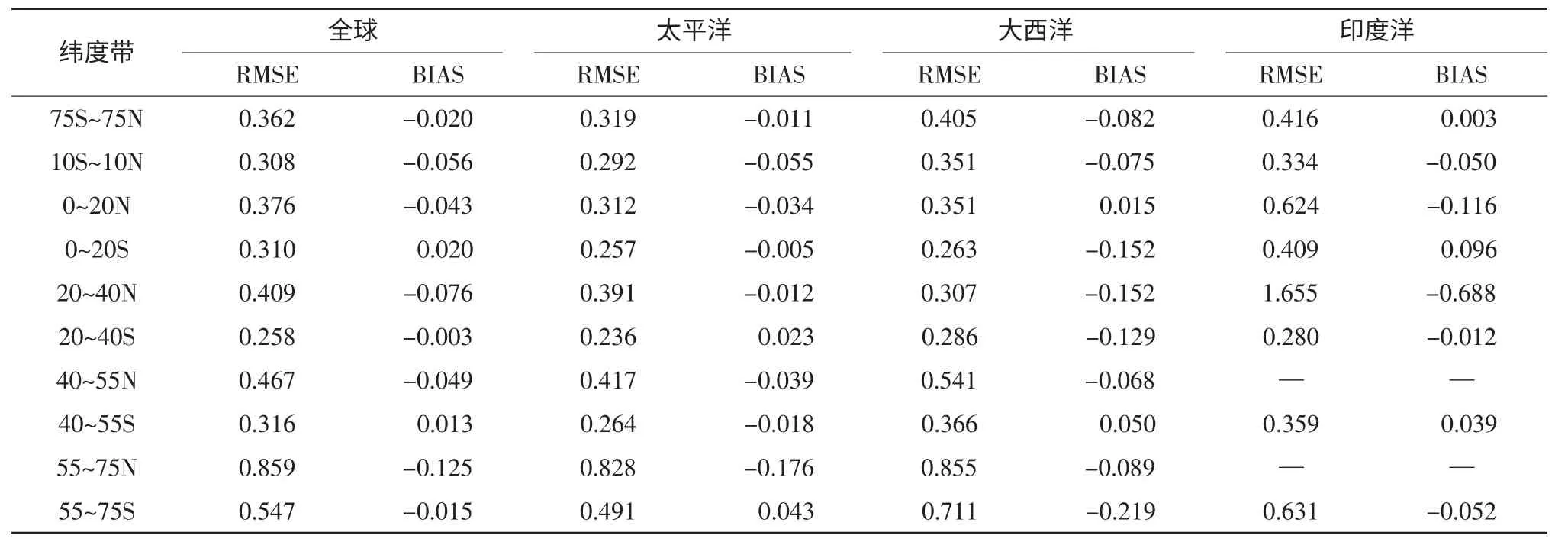
表2 CEC_10day_0.5 资料的分区误差统计表
(7) 近陆大误差区以负偏差为主,CEC_mon_1资料更加明显,但CEC_10day_0.5 资料在中国海和日本海则为正偏差(图3、图4);
(8) 南极绕极流区、黑潮附近、北太平洋、北大西洋等处正负偏差相间分布,中尺度特征明显(图4);
(9) 均方根误差最小(<0.2) 的区域多为负偏差区,这是由于CATDS/CECSMOS SSS 资料总体上倾向于负偏差,10 度平均图上的负偏差区为比较一致的负偏差,所以BIAS 绝对值和RMSE 值接近;而正偏差区则是正负相间,以正为主,所以RMSE 值大于平均偏差绝对值(图3、图4);
(10) 全球(南北纬75 度以内) 平均,CEC_10day_0.5 资料的RMSE 为0.362,CEC_mon_1 资料的RMSE 为0.314。中低纬大洋内部,均方根误差多在0.4 以下(图3、图4、表1、表2);
(11) 两种CEC_SSS 资料的纬度带平均偏差都很小,大都接近零值,基本可以看作无偏的。(表1、表2)
2.3 几种高分辨率资料的比较
本节对4 种较高时空分辨率的SMOS SSS 格点产品进行检验比较,检验方法同3.2 节。这4 种资料分别是:CEC_10day_0.5,BEC_binned,BEC_oi和BEC_fused(见2.1 节)。图5-6 给出了经插补处理得到的均方根误差(RMSE) 和平均偏差(BIAS) 分布图。限于篇幅,原始离散网格点的计算结果以及10°网格平均图没有给出。表3-6 则分别给出了全球以及三大洋的,4 种资料不同纬度带进行平均的均方根误差和平均偏差数值。对于这些结果,综合进行分析。
对这4 种高分辨率资料的比较,有以下结论:
(1) BEC_binned 资料均方根误差最大,全球平均0.5~0.6,近陆20°-30°的范围以及南极绕极流区RMSE 都在0.4 以上。其他3 种9 ~ 10 d、0.25°-0.5°分辨率资料(CEC_10day_0.5,BEC_oi,BEC_fused) 均方根误差量级相当,差异不太明显。BEC 的两种分析产品总体上RMSE 更小(图5、表3-6)。
(2) 三大洋相比,太平洋RMSE 最小,印度洋RMSE 最大,大西洋居中(图5、表4-6)。
(3) 从均方根误差来看,BEC_oi 和BEC_fused资料在近岸地区(尤其是太平洋和印度洋近岸地区) 优于CEC_10day_0.5,总体表现BEC_oi 似乎更好些。在东中国海、日本周边、菲律宾海等西北太平洋边缘海以及南美西海岸,BEC_fused 资料最好。而在北太平洋和北大西洋中纬度大洋中部,CEC_10day_0.5 资料略好(图5)。
(4) 对于平均偏差,则是CATDS/CEC-OS 的CEC_10day_0.5 资料远小于其他3 种BEC 的资料。再查看表1 可见,CEC_mon_1 资料的平均偏差与CEC_10day _0.5 大体相当,而3 种BEC 资料的平均偏差也大体相当。CEC 中心处理的资料偏差要显著小于BEC 中心处理的资料。3 种BEC 资料相比,BEC_oi 平均偏差最小(表3-6)。
(5) BEC3 种资料的平均偏差空间分布形势相近,CEC 两种资料的空间分布形势也相近。但二者之间存在比较明显的差别,比如在西太平洋大陆边缘,BEC 为较强的负偏差,CEC 则以正偏差为主;日界线附近的热带太平洋,CEC 存在较强负偏差,BEC 则无;南极绕极流附近,BEC 资料有很大的正偏差,而CEC 资料没有,等等(图6)。
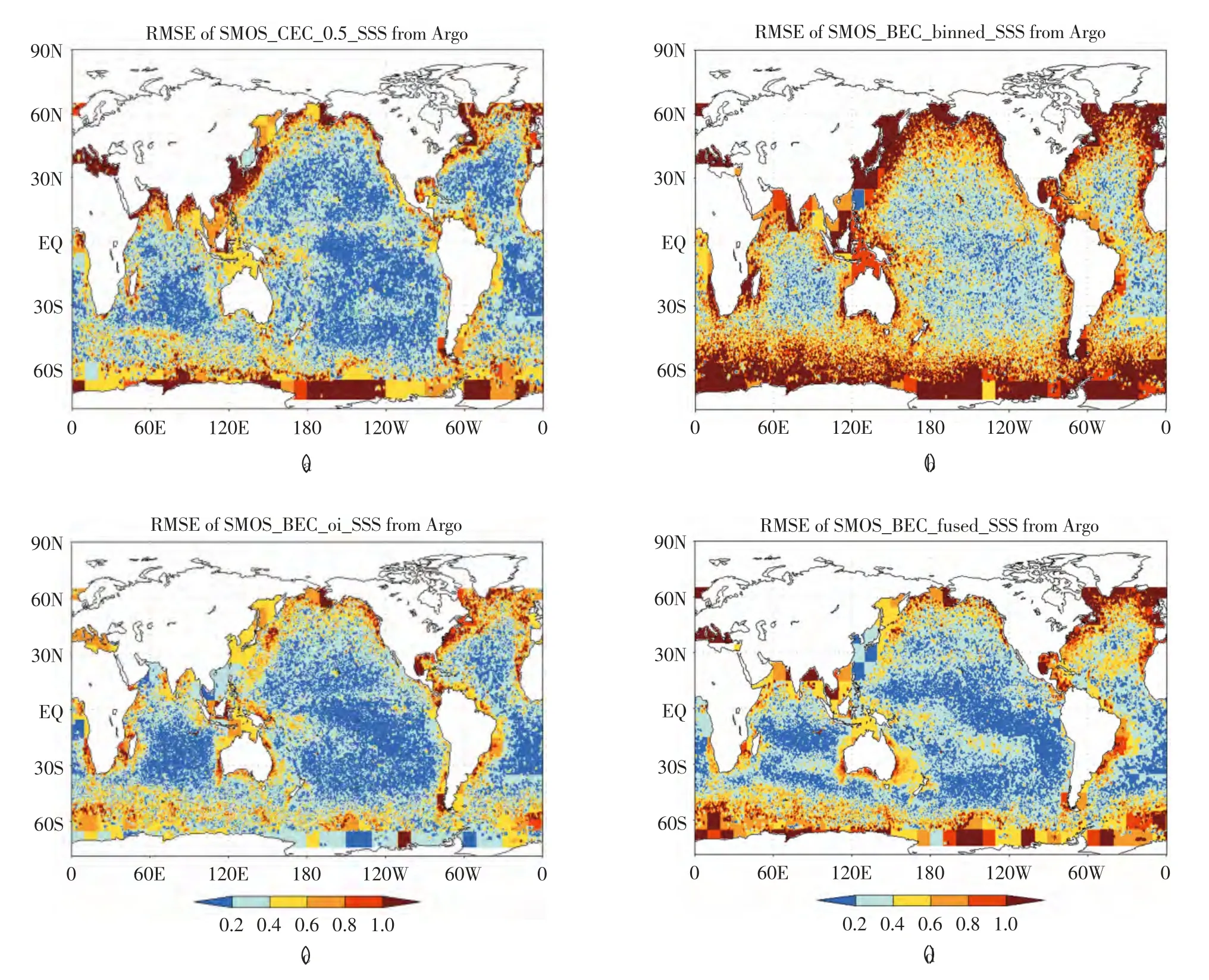
图5 经过插补处理的4 种SMOS_SSS 资料相对于Argo 资料的均方根误差(RMSE)
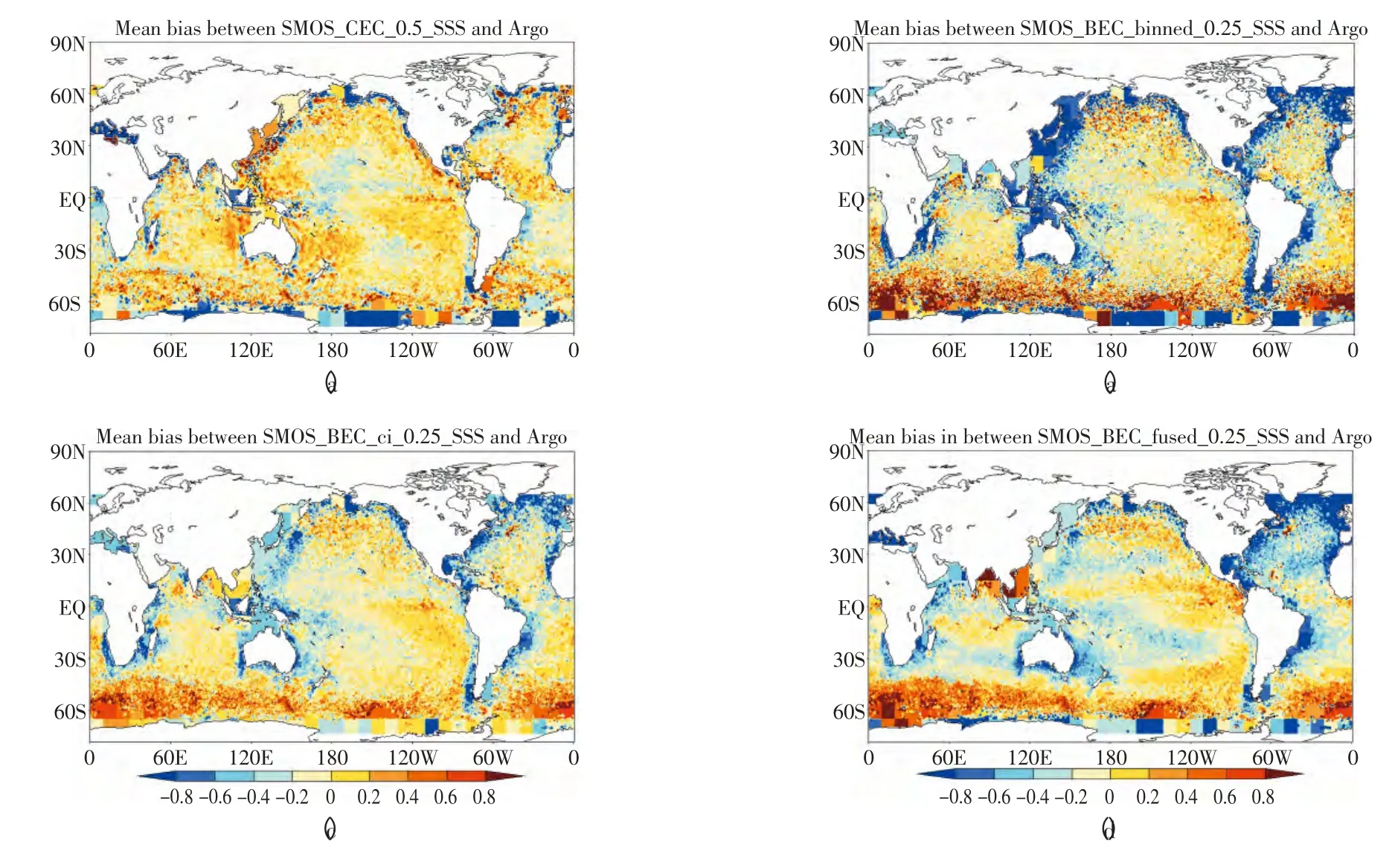
图6 经过插补处理的4 种SMOS_SSS 资料相对于Argo 资料的平均偏差(BIAS)
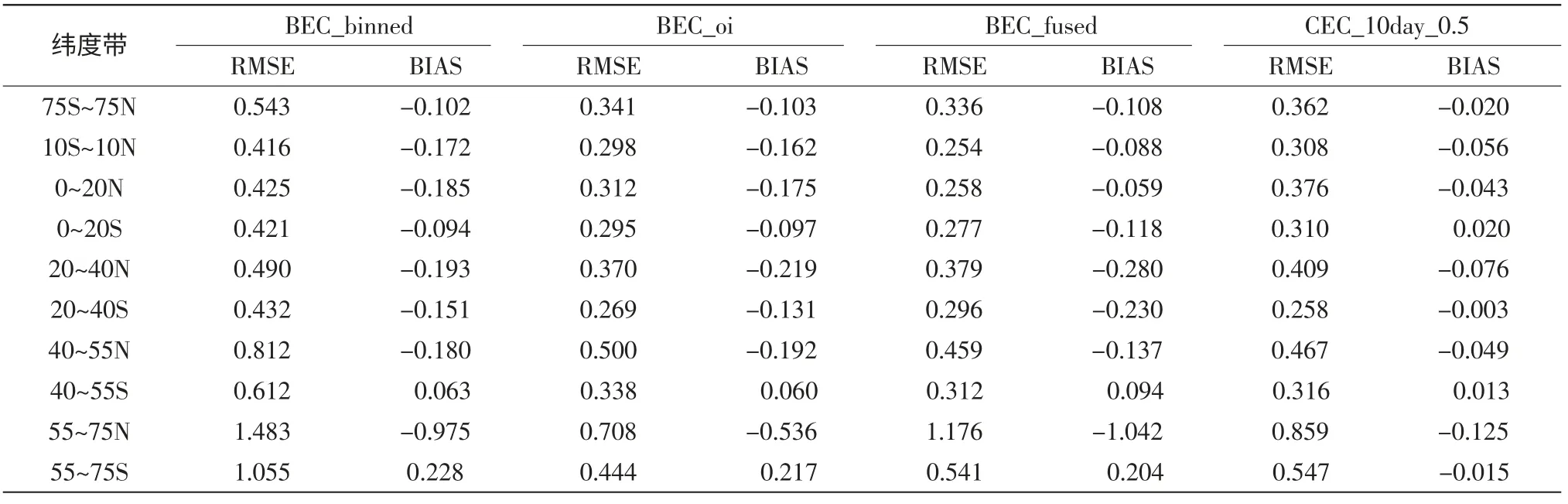
表3 全球(0-360°E) 4 种SMOS SSS 资料的分区误差统计表
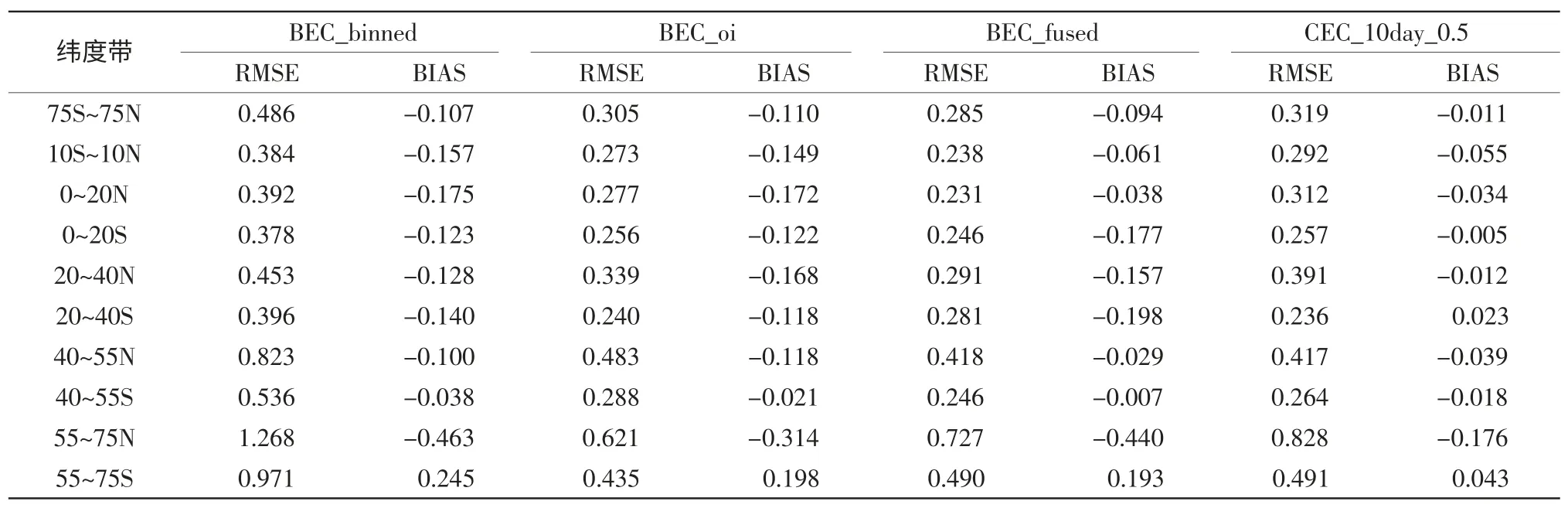
表4 太平洋4 种SMOS SSS 资料的分区误差统计表
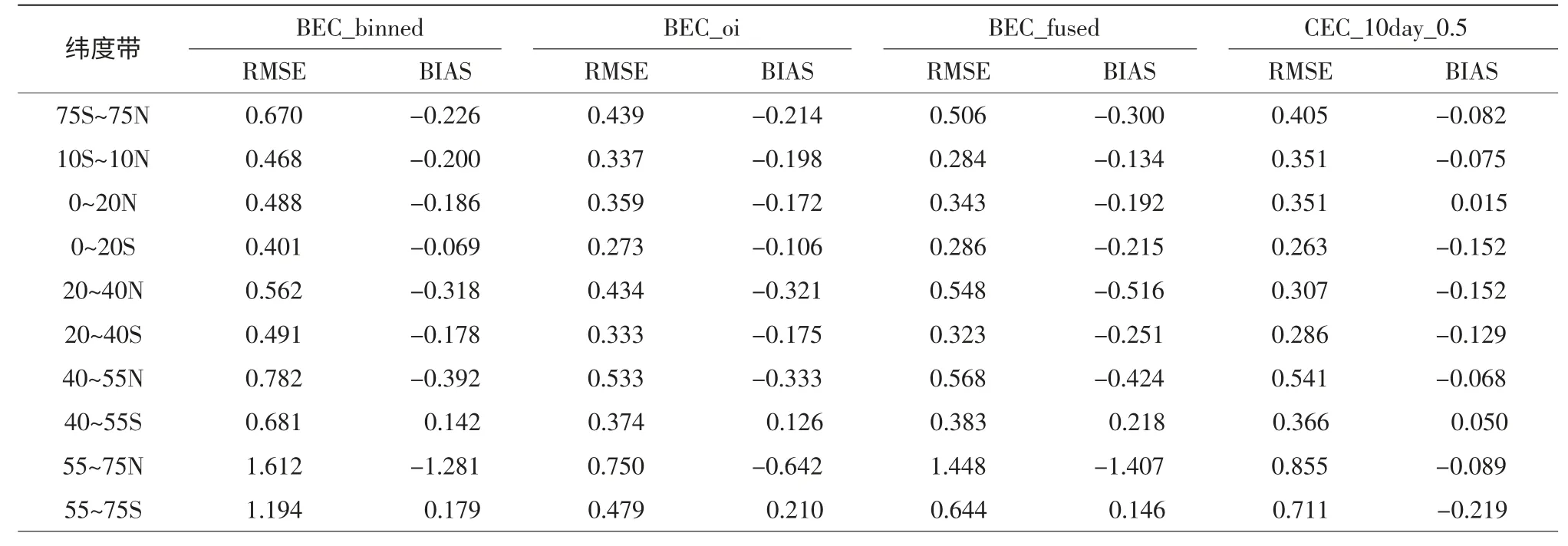
表5 大西洋4 种SMOS SSS 资料的分区误差统计表
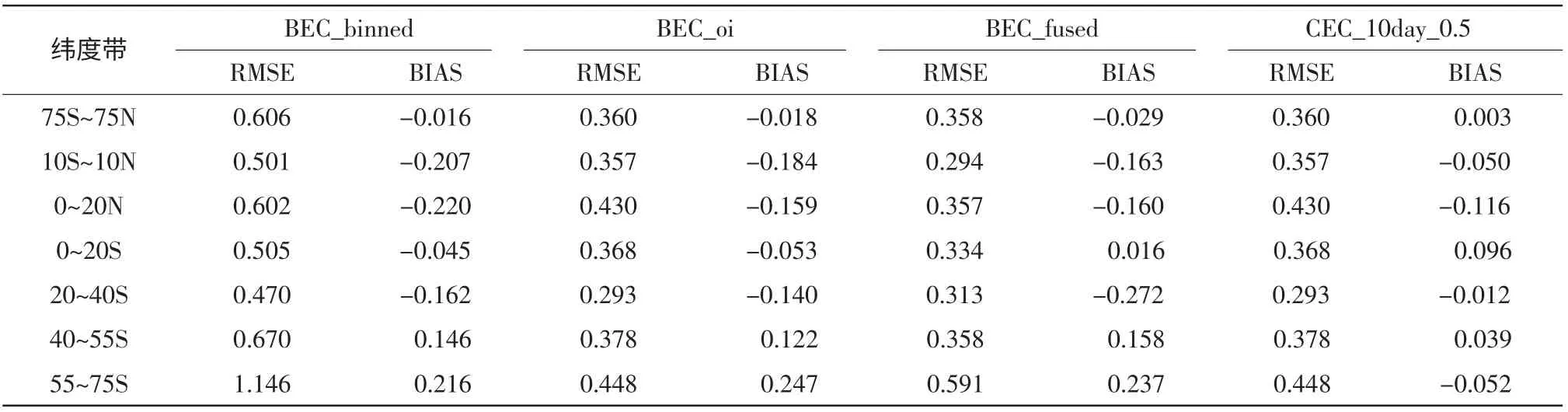
表6 印度洋4 种SMOS SSS 资料的分区误差统计表
(6) 3 种BEC 资料相比,简单加权平均得到的BEC_binned 资料RMSE 和BIAS 都最大,利用其他更可靠资料融合处理后的BEC_oi 和BEC_fused 资料,RMSE 大幅减小,BIAS 也有所减小,但不像RMSE 那样显著,个别地方甚至还略有增大(表3-6)。
(7) BEC_fused 资料在北大西洋15N 以北大面积出现较强负偏差,比BEC_binned 资料偏差还大,原因有待进一步分析(图6)。
(8) 高纬地区,往往bias 最大,RMSE 也最大(图5-6、表3-6)。
(9) 热带地区均方根误差,从数值上来看(表3 -6), 一 般 来 说, CEC_10day_0.5 >BEC_oi >BEC_fused,即BEC_fused 优于BEC_oi,这与从图5 上看到的不太一致。这可能是由于,图5 显示的是误差较小的面积范围大小,在小于0.2 的范围内,BEC_fused 资料的误差数值相对更小些,导致尽管范围并不大,但平均误差数值更小。
(10) 中高纬4 种资料的均方根误差相对大小比较复杂,除BEC_binned 误差最大外,另外3 种资料在不同纬度带各有不同表现,大体上误差量级相当(表3-6)。
3 结论
盐度是最重要的海洋学物理参数之一,对于大洋环流和海气相互作用等海洋物理过程都有重要意义。但是,由于卫星能够测得的辐射亮温对于盐度的敏感度过低,盐度的卫星遥感非常困难,盐度成为最后一个实现卫星遥感监测的重要海表物理参数。直到2009年11月,第一颗盐度遥感卫星SMOS 才成功发射,并开始提供覆盖全球范围的、空间均匀分布、时间上连续的海表盐度产品,大大弥补了之前的海洋观测系统对海洋盐度观测的不足。
但是,在对这种新资料进行使用之前,首先必须搞清楚以下几个问题:该资料的精度如何,其误差在全球不同区域有何不同特征,造成这些特征的原因是什么?特别是鉴于盐度卫星遥感的困难以及各种噪音的影响,对SMOS SSS 资料的系统检验更是极其必要的。
本文通过与WOA09 资料以及Argo 资料进行对比,对5 种最新的经过再处理的SMOS SSS L3/4级产品进行了检验分析。主要结论如下:
(1) 定性来看,SMOS年平均海表盐度场与WOA09 资料非常接近,一些已知的重要的分布形势都有所体现;但在一些地区,也存在比较显著的差异。
(2) 对SMOS CEC_mon_1 SSS 资料与Argo 资料的偏差的统计表明,,其分布接近正态分布,3年的平均偏差为-0.028,接近无偏,但最大偏差超过2。误差标准差为0.385,偏度系数为-0.96,分布的非对称性并不显著。
(3) 随着时空分辨率的降低,SMOS SSS 资料的均方根误差显著减小。
(4) 大洋中部误差较小,近陆误差大;三大洋中太平洋均方根误差最小;热带误差较小,高纬地区误差最大。高纬地区的大误差,与低温有关,亮温对盐度的敏感度随温度降低而降低,在海冰附近与“海冰污染”(由海冰和海洋的不同辐射特性造成) 有关,而南大洋地区的大误差还与大风造成的恶劣海况有关,在海表粗糙度等级较高时,SSS 的反演也不准确。而在北大西洋、北太平洋、北印度洋等误差最大区域,除了“近陆污染”(由陆地和海洋的不同辐射特性造成) 的原因之外,更重要的原因在于人为无线电频率干扰(RFI) 的影响。(Martin -Neira et al, 2011; CATDS -CECOS,2011,2012;Jean-Luc et al,2014)
(5) BEC_binned 资料均方根误差最大,全球平均0.5~0.6,近陆20°~30°的范围以及南极绕极流区RMSE 都在0.4 以上。其他4 种资料的均方根误差量级相当,差异不太明显,全球平均的RMSE在0.3-0.4。CEC_mon_1 资料误差最小,全球平均RMSE 为0.314;另外几种高分辨率产品中,BEC的两种分析产品总体上RMSE 更小。
(6) BEC3 种资料的平均偏差空间分布形势相近,CEC 两种资料的空间分布形势也相近。但二者之间存在比较明显的差别。
Barcelona Expert Center, 2014a. Quality Report:Validation of SMOSBEC products from 2013001 re-processing campaign.Years 2010-2013 dataset.http://cp34-bec.cmima.csic.es/doc/BEC-SMOS-0005-QR.pdf,2013-3-20.
Barcelona Expert Center, 2014b. SMOS-BEC Ocean and Land Products Description.http://cp34-bec.cmima.csic.es/doc/BEC-SMOS-0001-PD.pdf,2014-5-28.
Benoît T,Charles-Emmanuel T,Lionel R,et al,2008.Expected impact of the future SMOS and Aquarius Ocean surface salinity missions in the Mercator Ocean operational systems:New perspectives to monitor ocean circulation.Remote Sensing of Environment,112 (4):1 476-1 487.
Boutin J, Martin N, Yin X, et al, 2012. First Assessment of SMOS Data Over Open Ocean:Part II-Sea Surface Salinity. IEEE Transactions on Geoscience and Remote Sensing,99:1-18.
Brassington G B, Divakaran P, 2009. The theoretical impact of remotely sensed sea surface salinity observations in a multi-variate assimilation system.Ocean Modelling,27:70-81.
CATDS-CECOS Team (Nicolas Reul, et al.), 2011. SMOS Level 3 SSS Research products -Product Validation Document (Reprocessed Year 2010). ftp://eftp.ifremer.fr/salinity/documentation/, 2013-3-14.
CATDS-CECOS Team (Nicolas Reul, et al.). 2012. SMOS Level 3 SSS ResearchProducts-ProductsUserManual (ReprocessedYears2010-2012).ftp://eftp.ifremer.fr/salinity/documentation/,2013-3-14.
Chen J,Zhang R,Wang H,et al,2014.An Analysis on the error structure and mechanism of SMOS remotely sensed sea surface salinity products.Acta Oceanologica Sinica,33(1):48-55.
CP34. 2008. Detailed Processing Model for SMOS CP34 OS L3 Processors.http://www.cp34-users.cmima.csic.es/light_web/documentation,2012-08-01.
Jean-Luc Vergely, Boutin J, Reul N, 2014. SMOS OS Level 3 Algorithm Theoretical Basis Document (v272). http://www.catds.fr/content/download/78841/1005020/file/ATBD_L3OS_v1.0.pdf,2014-7-3.
Jordà G,Gomis D,2010.Accuracy of SMOS Level 3 SSS products related to observational errors. IEEE Trans Geosci Remote Sens, 48(4):1694-1701.
Jordà Gl,Gomis D,Talone M,2011.The SMOS L3 mapping algorithm for sea surface salinity. IEEE Trans Geosci Remote Sens, 49(3):1032-1051.
Jordi Font,Adriano Camps,Andres Borges,et al,2010.SMOS:The Challenging Sea Surface Salinity Measurement From Space.Proceedings of the IEEE,98(5): 649-665.
Martin-Neira M, Corbella I, Torres F, et al. 2011. Overview: MIRAS instrument performance and status of RFI. http: //earth.eo.esa.int /workshops /smos _ science _ workshop / SESSION_1_ INSTRUMENTS /M.M.Neira_Overview_MIRAS_Instrument_ Status_ RFI.pdf,2011-11-30.
Reul N, Tenerelli J, Boutin J, et al, 2011.First SSS products from SMOS generated at the Centre Aval des Donnees SMOS. http: //earth.eo.esa.int/workshops/smos_science_ workshop/ SESSION_3_OCEAN_SALINITY/N.Reul_SMOS_1st_SSS_Products.pdf, 2011-11-30.
Thierry Carval, Bob Keeley, Yasushi Takatsuki, et al, 2014. Argo User′s manual version3.1. http: //www.argodatamgt.org/content/download/22546/155488/file/argo-dm-user-manual-v3.1.docx,2014-7-20.
Yin X, Boutin J, Martin N, et al. 2011. Sea surface roughness and foam signature onto SMOS brightness temperature and salinity. http: //earth.eo.esa.int/workshops/smos_science_workshop/SESSION_3_OCEAN_SALINITY/X.Yin_SMOS_brightness_temperature_salinity.pdf,2011-11-30.
陈建,2014.基于多源资料的三维温盐场重构和盐度时空特征研究.南京:中国人民解放军理工大学博士学位论文.
猜你喜欢
中学生数理化·七年级数学人教版(2023年3期)2023-03-21 00:44:56
震灾防御技术(2023年4期)2023-03-01 10:58:36
中国海洋大学学报(自然科学版)(2020年12期)2020-11-04 08:03:40
海洋信息技术与应用(2020年2期)2020-07-27 01:42:02
热带海洋学报(2020年3期)2020-05-25 04:51:30
海洋通报(2020年6期)2020-03-19 02:10:08
成都信息工程大学学报(2019年5期)2019-05-21 00:46:28
自动化学报(2017年2期)2017-04-04 05:14:28
中学生数理化·七年级数学人教版(2016年2期)2016-05-30 21:20:57
中国医药导报(2015年6期)2015-03-13 00:24:39
