
换流站组合式轨道巡检机器人的设计
2015-03-17 02:16刘志远王化玲王宏丽
通信电源技术 2015年3期
刘志远,王化玲,王宏丽,刘 婷
(1.国网宁夏电力公司检修公司,宁夏银川750000;2.山东鲁能智能技术有限公司,山东济南250002)
0 引 言
在智能电网快速发展的形势下,变电站的智能化已经成为一种趋势[1]。变电站的检测经历了三个阶段:传统的人工巡视和纸质记录的方式;利用监控与数据采集系统、继电保护等装置;变电站巡检机器人。变电站巡检机器人不仅减轻了人员的工作负担,而且可以对大量数据进行保存、处理、实时显示、报警等。文献[2]对变电站巡检机器人的结构、功能等进行了介绍。依据变电站面积大、设备处于露天状态及施工简单等特点,变电站巡检机器人大多采用速度快、效率高、运动噪声低的轮式结构。但是轮式机器人存在越障能力、地形适应能力差等缺点,一般只适用于野外且地形不太复杂的地区,这阻碍了智能电网的普及。
高压直流输电线与交流输电线相比具有容量大,线路造价低、运行可靠等优点,因而得到广泛的应用[3]。而换流阀作为高压直流换流站的核心器件,当其周期性导通和阻断过程中,电压和电流的急剧变化会产生频谱较宽的电磁干扰,在阀厅内距墙壁1 m处150 k Hz~1 GHz频段的电磁干扰水平最大值范围为102~105 dB(基准1μV/m,下同);在9~150 k Hz的低频段换流阀厅内距墙壁1 m处的电磁干扰最大值为140 dB[4]。同时,相对于交流变电站,高压直流换流站的噪声源更多,声功率级更大[5]。因此,直流换流站相比变电站存在更多的电磁干扰、噪声等问题。
本文有针对性的研制了一种组合式轨道巡检机器人,采用组合式工字型轨道及各种抗干扰措施克服直流换流阀厅强电磁、多噪声的影响。本文重点设计及实现了直流换流阀自动巡检机器人的各项功能,提高了工作效率,减轻人员的劳动强度及直流换流站的智能化水平。该设计针对银川东直流厅巡检,进行大跨距组合式轨道巡检机器人应用,具有一定的实践价值。
1 组合式轨道巡检机器人系统
结合室内换流阀厅、直流厅等室内设备实际情况,巡检机器人硬件结构如图1所示,采用工业级PC104主板、具有PC104总线结构的PM511板卡及串口扩展板,PM511板卡接收声音和有毒气体传感器、电机控制、OLM线性条码测距传感器的电信号,进行处理,利用104总线传送到主板;可见光图像采集摄像机、红外图像采集摄像机的视频信号通过串口接到PC104主板进行处理;最后经过电力载波发送到基站,同时接受基站的命令,调节运动控制卡调整电机1实现巡检机器人在轨道上左右移动,调整电机2实现巡检机器人的上下移动。
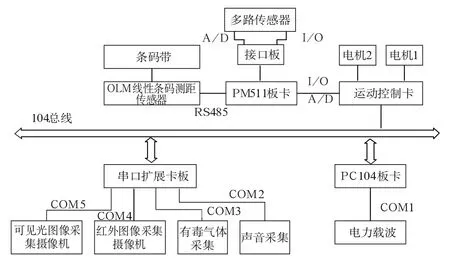
图1 硬件总体结构图
1.1 云台系统的设计
巡检机器人检测主要依靠可见光与红外视频设备,云台作为两者的载体,防护等级需要在IP43以上的要求。云台系统采用双通道,即可见光通道和红外通道,进行实时视频信息传输。云台驱动核心是通过内装的电动机,负责水平方向的转动。水平电机驱动减速器以增大驱动扭矩并降低输出转速,信息采集系统及其附件安装于支撑板上,随云台的水平电机驱动而转动,进而完成水平旋转的动作[6]。为此,云台为整个系统的检测提供重要的支撑作用。
1.2 红外热成像仪的设计
巡检机器人设计的一个核心项目就是检测设备的温度,红外热成像系统作为本系统核心器件,利用红外探测器,接收物体按其表面的温度自然辐射的红外线,在不接触的情况下,得到与物体表面热分布相对应的“实时热图像”。当处于较强的磁场中时,红外热像仪可能会有屏幕变形或漂移到一边、色彩退去不均匀、屏幕显示波动或不稳定的情况。为了使可见光摄像机和红外热成像仪摄像机所观测到的空间区域尽可能一致,把2个摄像头左右平行紧凑放置于防护罩内使之结合成一体机。同时,减少强电磁干扰对红外热成像仪的影响,机器人垂直距离地面的高度不小于4 m,如图2所示。

图2 巡检机器人实物图
1.3 定位系统的设计
变电站巡检机器人普遍采用的定位方式有:磁导轨、惯性、GPS等[7-9]。本系统采用OLM线性条码测距传感器,该传感器采用视觉原理进行测量,预先在组合式轨道贴置条码带,传感器通过检测条码带实现系统的精确定位,可达到毫米级的高测量精度。本定位系统属于非接触式测量,提高了设备的使用寿命,是同等级激光测距使用寿命的两倍。
2 组合式轨道的设计
结合换流站强电磁、多噪声和封闭环境的特点,巡检机器人采用组合式工字型轨道结构。图3为组合式导轨图,轨道由水平导轨和垂直移动导轨组成。在水平导轨上,巡检机器人通过检测条码带精确定位到水平的预置位;在垂直轨道上下移动对换流设备进行检测,同时云台进行水平转动,实现对设备的全方位检测。依据换流站电磁干扰的强度,水平轨道与地面垂直距离不低于4 m,水平轨道水平距离不低于90 m,能够最大程度的避免强电磁的干扰。
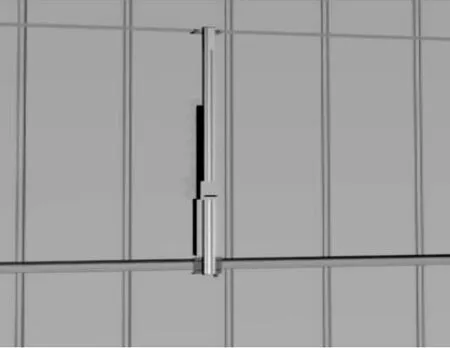
图3 组合式轨道图
导轨安装时直接在直流场墙壁内承重钢结构上打孔攻丝或者铆装螺母,将钢结构件的力引到波纹板外面的转接板上,然后在转接板上打孔,将导轨安装在转接板上。这样安装对直流场结构改变不大,仅需现场配打孔即可,而且转接板和衬垫的结构设计较为灵活,不受直流场本体结构设计的影响。
2.1 轨道供电方式
电源系统是整个巡检机器人的“心脏”,它为整个系统提供电能。目前,变电站的巡检机器人大多采用轮式结构,其移动属性决定其适合采用无缆化的电池供电。电池存在容量有限、重量大等特点。为保证巡检机器人的正常工作,需要对电池电压、电流、电量进行实时检测,实现自动充电。这使得巡检机器人系统存在更多的不稳定性,而且体积大[9]。组合式轨道巡检机器人采取轨道滑触供电方式,利用电刷直接接触供电线,电源稳定,不存在轮式结构复杂的电源监测与控制系统,车体不需要携带电池,体重减轻,控制系统简单,增加了系统的稳定性。
2.2 低压电力载波通讯方式
基于组合式轨道,本系统采用低压电力线载波通信方式,是以低压配电线(380 V/220 V电力线)作为信息传输媒介进行数据或语音等传输的一种特殊通信方式[10]。此方案可以避免电磁干扰的影响,其原理框图如图4所示。该系统由三个部分组成:终端设备部分、管理中心部分和低压电力线部分。终端设备的信号经过采集等处理后再调制成适合在电力线上传输的电力信号,通过耦合电路耦合到电力线上进行传输。管理中心有专门的接收设备,对接收的电力信号先进行解调及其它处理,再通过串口方式将其送到主控计算机。
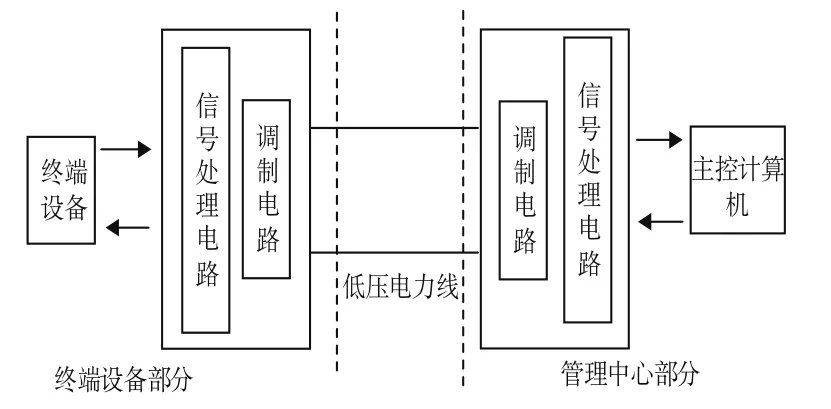
图4 低压电力载波结构图
3 通信系统的总体结构
为实现变电站主设备的远程监控,即“五遥”(遥测、遥信、遥控、遥调、遥视)功能[12]。机器人系统为网络分布式架构,整体分为基站层和终端层,如图5所示。基站层由后台机及智能控制与分析软件系统组成;终端层为阀厅内的轨道式巡检机器人本体及轨道。基站层和终端层通讯由网络交换机、通信线缆等设备组成,负责建立基站层与终端层间透明的网络通道。
4 软件设计
换流站巡检机器人是一种集各种视频、音频、控制的数据流的通信软件系统,是一个复杂的软件体系工程。为了简化开发过程中的复杂关系,易于开发,实现程序的模块化设计思想,引入了实时数据库的概念。使用动态链接库创建实时数据暂存区域,在通信实时主动更新数据的情况下,实现了各个执行模块之间的数据交互功能。

图5 系统整体结构示意图
4.1 移动站软件结构设计
移动站软件的设计主要包括:运动控制子程序和工作子程序两大部分。采用组合式轨道结构,运动控制子程序可以避免轮式结构的全局路径规划与局部行为规划算法[13],提高了系统的稳定性。通过设定不同的速度、方向,发送不同的信号驱动交流伺服电机,实时监测条码带达到预定位置。启动巡检机器人上下运动对设备进行检测。工作子程序将采集的数据进行打包,通过电力载波实时发送到动态数据库。
4.2 基站软件结构设计
基站软件系统的体系结构共分为4层,分别为数据层、功能层、逻辑层和表示层,如图6所示。数据访问层基于数据库平台,分类储存不同的数据文件,包括底层发送的数据、处理的数据、控制数据等。业务逻辑层、服务层和表示层都是基于.NET FrameWork框架,业务逻辑层主要进行数据处理、命令控制等;服务层主要完成巡检的各种服务,例如:视频服务、控制服务、数据服务、基础服务等。表示层是最顶层,包括用户人机交互界面、定制报表、机器人控制、数据统计分析、数据查询等。
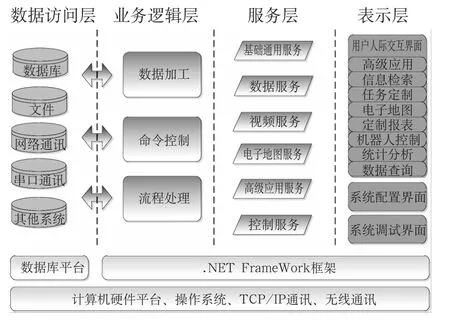
图6 基站监控后台软件体系结构
5 现场运行
本系统针对宁东站直流厅进行巡检测试,如图7所示,图中左上方为检测的可见光视频,能清晰看出设备的开关状态、各项指示与外观。左下方为红外视频,分析设备、触头与接头的温度,达到预警值会自动报警,实时检测设备的运行状态。右边区域为换流阀厅的示意图,可以看出巡检机器人的位置及设定的预置位,实时检测机器人,保证工作正常进行。右下方为信息栏,标示巡检机器人正在进行的动作,运行状态等。经过现场测试,组合式轨道机器人特别适合于换流阀厅的特殊工作环境。

图7 巡检系统主界面
6 结 论
针对换流站设备,本文研制的组合式轨道巡检机器人系统,实现了巡检机器人在强电磁干扰环境下的工作。已经对银川东直流厅进行巡检测试,测试结果表明本机器人系统的非接触式移动检测与换流站综合自动化的接触式监控结合,真正形成了全监控方式,提高了换流站设备运行的安全可靠性。
[1] 胡成群,刘 强,刘晶东.变电运行、管理、巡检一体化[J].电力信息化,2009,(05):75-78.
[2] 鲁守银,钱庆林,张 斌,等.变电站设备巡检机器人的研制[J].电力系统自动化,2006,(13):94-98.
[3] 何智江.发展中的中国高压直流输电事业[J].高压电器,2006,(06):460-463.
[4] 马为民,聂定珍,万保权,等.高压直流换流站换流阀电磁干扰的测量[J].高电压技术,2008,(07):1317-1323.
[5] 胡雨龙,李 兴,赵 明.高压直流换流站噪声综合治理[J].南方电网技术,2009,(01):49-52.
[6] 宋晓明.变电站智能巡检机器人关键技术研究[D].长沙:长沙理工大学,2013.
[7] 肖 鹏,张彩友,冯 华,等.变电站巡检机器人GPS导航研究[J].传感器与微系统,2010,(08):23-25,28.
[8] 肖 鹏,栾贻青,郭 锐,等.变电站智能巡检机器人激光导航系统研究[J].自动化与仪表,2012,(05):5-9.
[9] 王加芳,贾晓霞,房 静.变电站巡检机器人的编码器/惯性无轨导航[J].华电技术,2013,(08):11-14,76.
[10]叶 飞,杨世仁,吴春凤,等.变电站巡检机器人电源监测及控制系统研究[J].信息技术与信息化,2013,(04):81-84.
[11]戚佳金,陈雪萍,刘晓胜.低压电力线载波通信技术研究进展[J].电网技术,2010,(05):161-172.
[12]李敬红.关于“五遥”技术在无人值班变电站的应用[J].信息通信,2013,(02):278-279.
[13]曲道奎,杜振军,徐殿国,等.移动机器人路径规划方法研究[J].机器人,2008,(02):97-101,106.
猜你喜欢
粘接(2022年12期)2023-01-05
宁夏电力(2022年1期)2022-04-29
电子制作(2019年22期)2020-01-14
山西电力(2019年6期)2020-01-07
通信电源技术(2018年3期)2018-06-26
通信电源技术(2018年3期)2018-06-26
电子制作(2017年8期)2017-06-05
探索科学(2017年4期)2017-05-04
中国交通信息化(2016年8期)2016-06-06
海峡科技与产业(2016年3期)2016-05-17
