
潜艇水下作战中目标距离信息提取研究*
2015-03-14 12:32何青海丁文强
舰船电子工程 2015年10期
何青海 丁文强
(海军潜艇学院 青岛 266042)
潜艇水下作战中目标距离信息提取研究*
何青海 丁文强
(海军潜艇学院 青岛 266042)
浅海波导中目标辐射噪声LOFAR谱图存在明暗相间的干涉条纹,从中可以提取出目标距离特征量信息,它反映了目标运动过程中的距离变化率。低信噪比情况下,条纹特征不够清晰,提取的距离特征量值精度会降低。提出了对LOFAR谱图进行图像处理,使条纹特征更加明显。海试数据处理结果表明,去噪处理后提取出的距离特征量精度明显提高。
距离特征量; LOFAR谱; 图像去噪
Class Number TP391
1 引言
潜艇在水下对目标实施鱼雷攻击,之前快速准确地获取目标运动要素是提高命中概率的关键[1]。通常情况下潜艇使用被动声纳来探测和跟踪目标只能得到目标方位信息,传统的纯方位目标运动要素解算方法收敛速度慢,满足不了潜艇水下作战中对目标快速定位的要求,需要一种新的目标信息获取渠道和方法。
海洋波导的声场结构一般都非常复杂,对于水听器接收的宽带信号,LOFAR图上表现出明显的干涉现象,即存在明暗相间的干涉条纹图案。从二十世纪六十年代开始,美国和前苏联学者就陆续在仿真和实验研究中发现了这一特性[2~3]。干涉谱图中包含的丰富信息有助于对舰艇目标进行运动状态估计。
距离特征量是指在目标声源与接收器相对运动过程中,目标初始距离与不同时刻的瞬时距离之间的比值,它反映了目标声源的距离变化情况。本文提出了一种基于LOFAR谱图的距离特征量提取方法,该方法基于波导不变性原理[4],通过图像处理技术来提取LOFAR图中干涉条纹的斜率等信息,最终计算得到目标的距离特征量。在实际应用中,由于海洋环境的复杂性,目标辐射噪声的LOFAR谱图中会叠加大量的噪声,致使干涉条纹特征不够明显,该方法无法提取出准确的距离特征量值。针对此问题,本文提出利用扩散图像去噪方法[5]对LOFAR图进行处理。
2 距离特征量
2.1 距离特征量定义
若目标运动过程中,初始时刻为t0,初距为rt0,t时刻的目标距离为rt,则t时刻的距离特征量定义为:Dt=rt0/rt。它描述的是目标初距与瞬时距离的比值。
该观测量可融入目标运动要素解算过程,以改善目前存在的解算时间长、本艇机动复杂等问题。同时,这也对距离特征量值的精度和实时性提出了要求。如果精度很低的话,反而会使目标运动要素解算过程的效果变差。如果距离特征量的提取时间过长,则无法与方位信息一起作为观测量参与解算。
2.2 距离特征量提取
根据波导不变性原理,提出了一种基于LOFAR谱图的距离特征量提取方法,由LOFAR图中条纹角度φ的大小,分两种情况来讨论。由于时间和声源至接收阵的距离是对应的,因此声强的时频分布又可以和距离-频率分布对应起来。
1)φ>90°。时频图用图1所示的距离-频率分布图来描述。横轴为距离轴,纵轴为频率轴,频段范围为(f1,f2),f1

图1 条纹角度大于90°时目标干涉结构图
由条纹图中几何关系,可得
(1)
其中,φ的大小由Radon变换[10]得到,m为时频图中距离轴点数,mr为B点在距离轴上投影点距离左侧频率轴的点数,df为时频图中频率轴点间距。
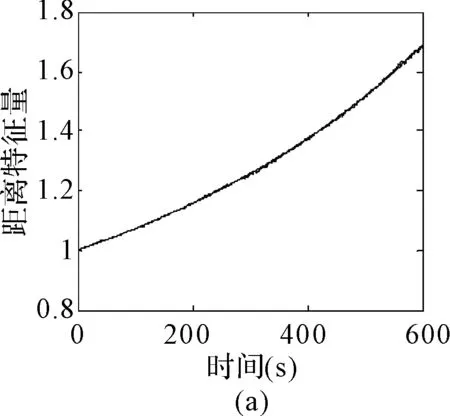
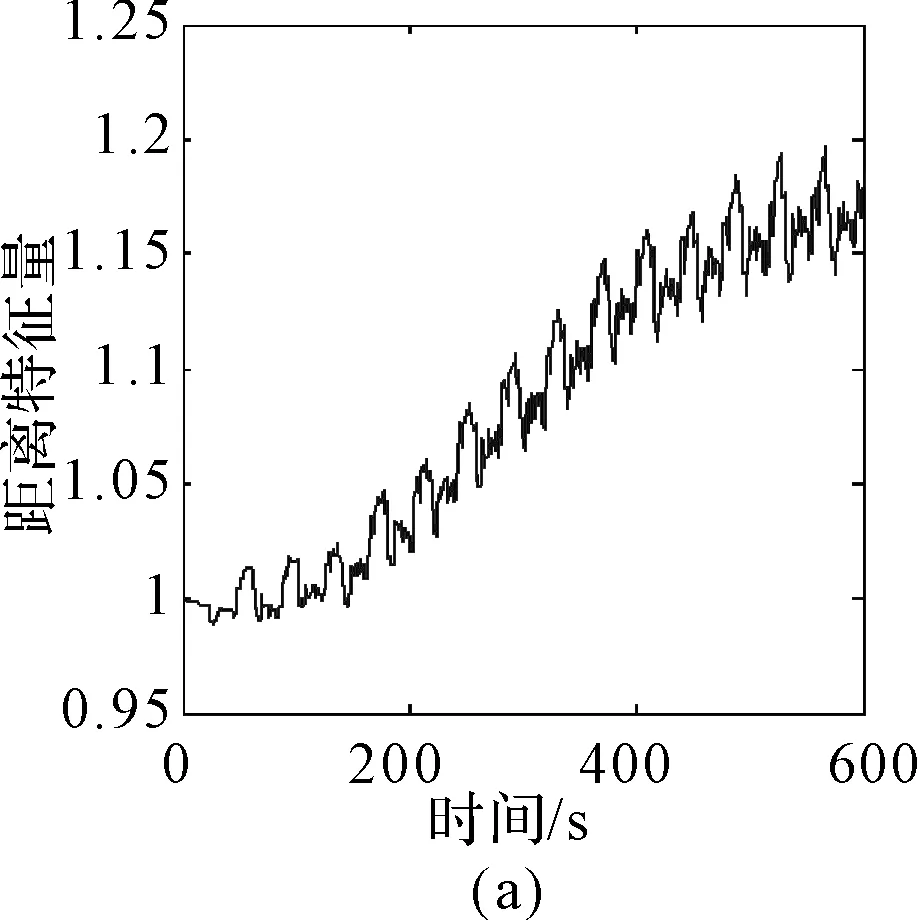
2)φ<90°。时频图如图2所示,横轴为距离轴,纵轴为频率轴,频段范围为(f1,f2),f1 (2) 图2 条纹角度小于90°时目标干涉结构图 通过以上两种情况的分析,可得到r2=n*r1,目标初距为rt0,以后各个时刻对应的目标瞬时距离与rt0的关系为 r1=n1*rt0=rt0/D1, r2=n2*r1=n2*n1*rt0=rt0/D2, …… rn=rt0/Dn 根据以上迭代方法可得到不同时刻瞬时距离与初距之间的关系向量即距离特征量D=(D1,D2,…,Dn)。 基于该距离特征量提取算法,在典型浅海负跃层海洋环境下,利用KRAKEN模型计算声场,对算法的可行性进行仿真验证。 3.1 目标接近接收器 典型浅海负跃层海洋环境模型如图3所示,海深100m,接收设备为单传感器,深度30m,目标等深航行,深度4m,航速20节。如图4所示,目标从A点出发,向着靠近接收传感器的方向运动,B点为最近通过距离点。目标最近通过距离为1海里,起始点位置A距离接收阵的垂直距离为8海里。 图3 典型浅海负跃层海洋环境 图4 目标靠近接收器运动示意图 假设接收传感器接收的信号没有受到噪声污染,仿真得到目标的时频谱图如图5所示。图中有很清晰的干涉条纹,条纹角度φ>90°,这也意味着,随着时间的推移,目标距离传感器越来越近。因此,根据干涉条纹的形状和角度,可以判断目标的运动状态。 运动目标在每个时刻的距离特征量值提取结果及相对误差如图6所示。由于目标在不断地靠近接收器,目标距离越来越小,距离特征量值则越来越大。所以,通过距离特征量值的变化趋势,也能判断目标的运动状态。图6(a)中,波动区线表示通过算法提取出的距离特征量值,光滑曲线表示通过实际距离计算出的距离特征量真值,这两条线几乎完全重合。图6(b)是距离特征量提取结果的相对误差,可以看出,误差非常小。 图5 目标靠近接收器时时频谱图 图6 目标靠近接收器时距离特征量提取结果及相对误差 3.2 目标远离接收器 海洋环境模型同样如图3所示。目标运动情况如图7所示,目标从C点出发,向着远离接收传感器的方向运动,B点为最近通过距离点。最近通过距离为1海里,起始点位置C距离接收阵的垂直距离为5海里。 图7 目标远离接收器运动示意图 假设接收传感器接收的信号没有受到噪声污染,仿真得到目标的时频谱图如图8所示。图中有很清晰的干涉条纹,条纹角度φ<90°,这也意味着,随着时间的推移,目标距离传感器越来越远。 图8 目标远离接收器时时频谱图 目标在每个时刻的距离特征量值提取结果及相对误差如图9所示。由于目标在不断的远离接收器,目标距离越来越大,所以距离特征量值变得越来越小。图9(a)中,光滑曲线与波动曲线吻合得较好,说明提取精度比较高,图9(b)中距离特征量提取的相对误差结果说明了这点。 仿真假定在没有噪声污染的条件下,干涉条纹谱图比较清晰,距离特征量提取精度很高。然而,对实际水下声源辐射噪声信号的时频谱图分析可以发现,因海洋环境噪声及各种随机干扰的作用,时频谱图中经常存在大量的噪声,并且这些噪声具有与信号可相比较的幅值,从而使条纹特征模糊不清,导致提取算法性能大大降低。为了能够在低信噪比情况下提取出目标的距离特征量信息,本文提出了基于图像去噪处理的提取技术,即先用图像去噪方法对时频谱图进行平滑处理,使条纹特征变得更加清晰,再对去噪后图像进行距离特征量的提取,这样可有效提高提取的精度。 偏微分方程方法[5~9]是近些年来出现的一种新的图像滤波技术,它能够通过设计合适的扩散系数控制扩散方程的扩散行为,使得在平滑图像的同时能够保留甚至增强图像的特征信息。 设初始灰度图像为u0=u(x,y,0),u(x,y,t)表示时刻t时的平滑图像。则图像的扩散方程为 (3) 式中,F表示一个特定算法所对应的算子。本文采用张量型扩散模型[5]。以某次海试的渔船目标辐射噪声信号作为待处理对象,提取出距离特征量信息。对目标辐射噪声进行谱分析,得到LOFAR谱图,如图10(a)所示,图中有干涉条纹图案,但由于噪声的影响,条纹显得很不清晰。采用图像扩散去噪方法处理后的结果如10(b)所示,条纹被明显区分出来。 去噪前后距离特征量的提取结果如图11所示。由图11(a)可知,由于噪声的影响,去噪前提取出的距离特征量值波动较大;由图11(b)可知,经过扩散去噪方法处理后,从海试数据中能够准确、平稳地提取出距离特征量值,从而解决了由于噪声影响而导致的距离特征量提取不准、失真问题。 图11 某渔船目标去噪前后距离特征量提取结果 距离特征量提取为获取目标运动信息提供了一种新的途径。仿真结果表明了提取算法的准确性。目标辐射噪声LOFAR谱图中干涉条纹的清晰程度直接影响距离特征量的提取精度。在低信噪比情况下,噪声使得条纹特征不明显,距离特征量提取精度不高,波动起伏较大。经由本文提出的图像扩散去噪方法处理后,提取出的距离特征量值比较平稳,精度比去噪前有了明显提高。 [1] 赵正业.潜艇火控原理[M].北京:国防工业出版社,2003:91-93. [2] Guthrie A N, Fitzgerald R N, Nutile D A, et al. Long-range low-frequency CW propagation in the deep ocean: Antigua-Newfoundland[C]//J. Acoust. Soc. Am,1974,56(1):58-69. [3] Chuprov S D. Interference structure of sound field in the layered ocean[C]//Ocean Acoustics, Moscow: Nauka,1982:71-91. [4] Aaron M T. Source ranging with minimal environmental information using a virtual receiver and waveguide invariant theory[C]//J. Acoust. Soc. Am,2000,108:1582-1594. [5] Weickert J. Anisotropic Diffusion in Image Processing[M]. Stuttgart: Teubner-Verlag,1998. [6] 徐书方,刘婧,沈立新.一种基于偏微分方程的图像去噪方法[J].大连海事大学学报,2010,36(4):107-110. [7] 杨文国.一种基于扩散方程的图像去噪方法[D].南京:南京信息工程大学,2007. [8] CATTé F, COLL T, LIONS P L. Image selective smoothing and edge detection by nonlinear diffusion[J]. SIAM J.Num. Anal,1992,29(1):182-193. [9] GILBOA G, SOCHEN N A, ZEEVI Y Y. Forward and backward diffusion processes for adaptive image enhancement and denosing[J]. IEEE Transactions on Image Processing,2002,11(7):689-703. [10] 吴涛,袁嗣杰,陈进军,等.一种新的LFM信号检测算法仿真分析[J].系统仿真学报,2008,20(9):2395-2397. Extraction of Target Distance Information in Undersea Warfare for Submarine HE Qinghai DING Wenqiang (Navy Submarine Academy, Qingdao 266042) Striations have appeared in plots of Low Frequency Analysis Recording(LOFAR) spectrum in acoustic environment of the shallow water. The distance change ratio of target can be described by distance characteristic feature. It can be extracted from LOFAR spectrum striations. Low precision of distance characteristic feature has been obtained because of the low signal to noise ratio and striation pollution. In order to make the striations more clearly, an image denoising method has been put forward. The ocean experimental results show that the precision of distance characteristic feature is one times higher after LOFAR spectrum image processing. distance characteristic feature, LOFAR spectrum, image denoising 2015年4月3日, 2015年5月29日 何青海,男,博士,讲师,研究方向:兵种战术,水声环境。丁文强,男,博士,工程师,研究方向:兵种战术。 TP391 10.3969/j.issn.1672-9730.2015.10.013
3 提取算法仿真分析







4 图像扩散去噪


5 结语
猜你喜欢
石材(2022年3期)2022-06-01
石材(2022年3期)2022-06-01
北京航空航天大学学报(2020年3期)2021-01-14
科学与信息化(2020年20期)2020-10-12
小福尔摩斯(2019年2期)2019-09-10
红蜻蜓·低年级(2017年6期)2017-10-30
都市丽人(2017年4期)2017-04-12
支点(2016年11期)2016-12-22
Coco薇(2016年3期)2016-04-06
娃娃画报(2014年9期)2014-10-15
