
高低温摇摆台运动控制系统设计*
2015-03-10 10:34:46王志伟
航天控制 2015年6期
王志伟
江苏信息职业技术学院,江苏无锡214153
飞行器在飞行之前,需通过地面试验,获取大量实测数据后才可决定是否参与实战,本设计以S7-200PLC为控制核心,组成摇摆台高低温运动控制系统,其由俯仰、滚动摇摆台2部分组成,是控制舱综合测试台配套设备之一。其作用是在极限温度下操控控制舱的俯偏和滚动动作,使综合测试台在不同坐标轴方位上可检测控制舱系统的极限性能参数[2]。
1 系统整体框架设计及要求
摇摆台具体技术要求为:
1)摆动台采用2台同步步进电机驱动、控制偏心运动,分别产生俯仰偏航和滚动方位上的正弦摇摆运动;
2)俯仰方向摇摆 f=1.0Hz,幅值为 ±1.5°;滚动方向摇摆频率f=1.0Hz,幅值为±1.5°;
3)频率稳定度及误差均不大于3%,幅值误差及稳定度不大于1%;
4)摇摆台输出步进驱动信号波形应无毛刺、拐点畸变等现象;
5)摇摆台能控制产品顺航向顺时针转动,应平稳无突跳,角速度不大于30(°)/s。控制舱吊挂向上状态为初试位置0°,断电时也在0°,相对初始位置转 ±45°,180°[3-4]。
2 系统硬件配置
摇摆台硬件系统组成如图1所示。其运动控制系统以西门子S7-200(CPU226)作为控制核心,配置EM231,EM232模拟量输入输出模块,控制两路步进驱动系统动作,采用MCGS(TPC1062Hi)作为人机界面,上位机通过16位高分辨率凌华(PCI-6208+6216)数据采集卡直接采集模拟量输出模块EM232的信号(每秒钟采集5000次),采用Modbus-485通讯方式,电机与摆台之间采用1∶1的减速比,在摆台和滚转台安装高精度直线和旋转位移传感器,供电电压5V,摆动时200个步进驱动脉冲对应1mm,滚转时20000个步进驱动脉冲对应1圈(360°)。

图1 摇摆台硬件系统组成框图
2.1 供电电路设计
电路所需电源包括给PLC系统、位移传感器及步进驱动器所需的+24V直流电源,电路如图2所示。
2.2 PLC端口配置
S7-200端口通过Q0.0~Q0.7向步进驱动器输出使能、方向等信号,控制电动机的转速和转向,同时输入端口配置手动、急停、限位等信号输入,如图2所示。
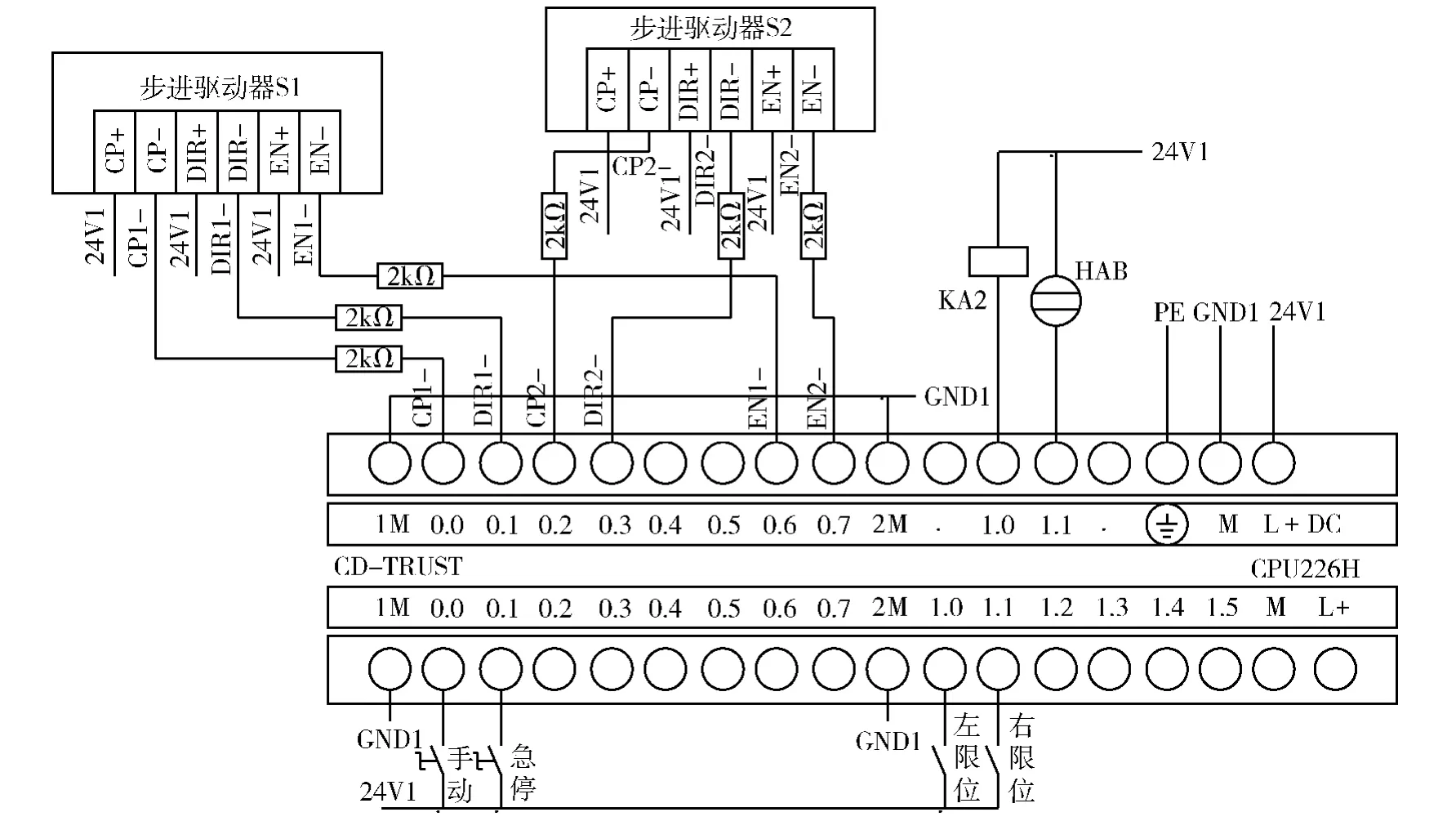
图2 S7-200PLC连接电路图
2.3 EM231模拟量输入模块及EM232模拟量输出模块I/O配置
2个高精度位移传感器输出电流信号通过EM231的AI1+和AI3+端口返送给PLC实现闭环PID控制,同时将该反馈信号输入模拟量模块EM232供上位机数据采集。
在原系统未加EM232模拟量模块之前,反馈信号既通过EM231返送给PLC实现PID控制,又通过并接方式直接给上位机提供数据采集(如图3所示),通过测试,这种连接方式下系统输出正弦波受相互影响干扰较大,毛刺较多,故系统在原有基础上扩展了EM232AQ4×12Bit模拟量输出模块,通过其光电隔离利用模块及高速输入滤波功能,很好地抑制了干扰,同时12位的转换精度完全满足了精度要求,EM232模拟量模块配置如图4所示。

图3 EM231端口配置

图4 EM232端口配置
2.4 步进驱动器及航空插头端口配置
由于摇摆台控制箱与台体的传感器与步进电机距离较远,故两者之间均采用航空插头连接,输出控制信息及输入反馈信息,其端口配置如表1所示,线号与以上原理图一致。

表1 航空插头XJ3和XJ4端口配置
3 系统PLC程序设计
3.1 主程序
在主程序中,包含了初始化(initial)、Modbus、滚转操作、俯偏操作、平滑过渡(smooth)和俯偏滚转调节(包含PID控制)等程序模块。程序如图5所示。
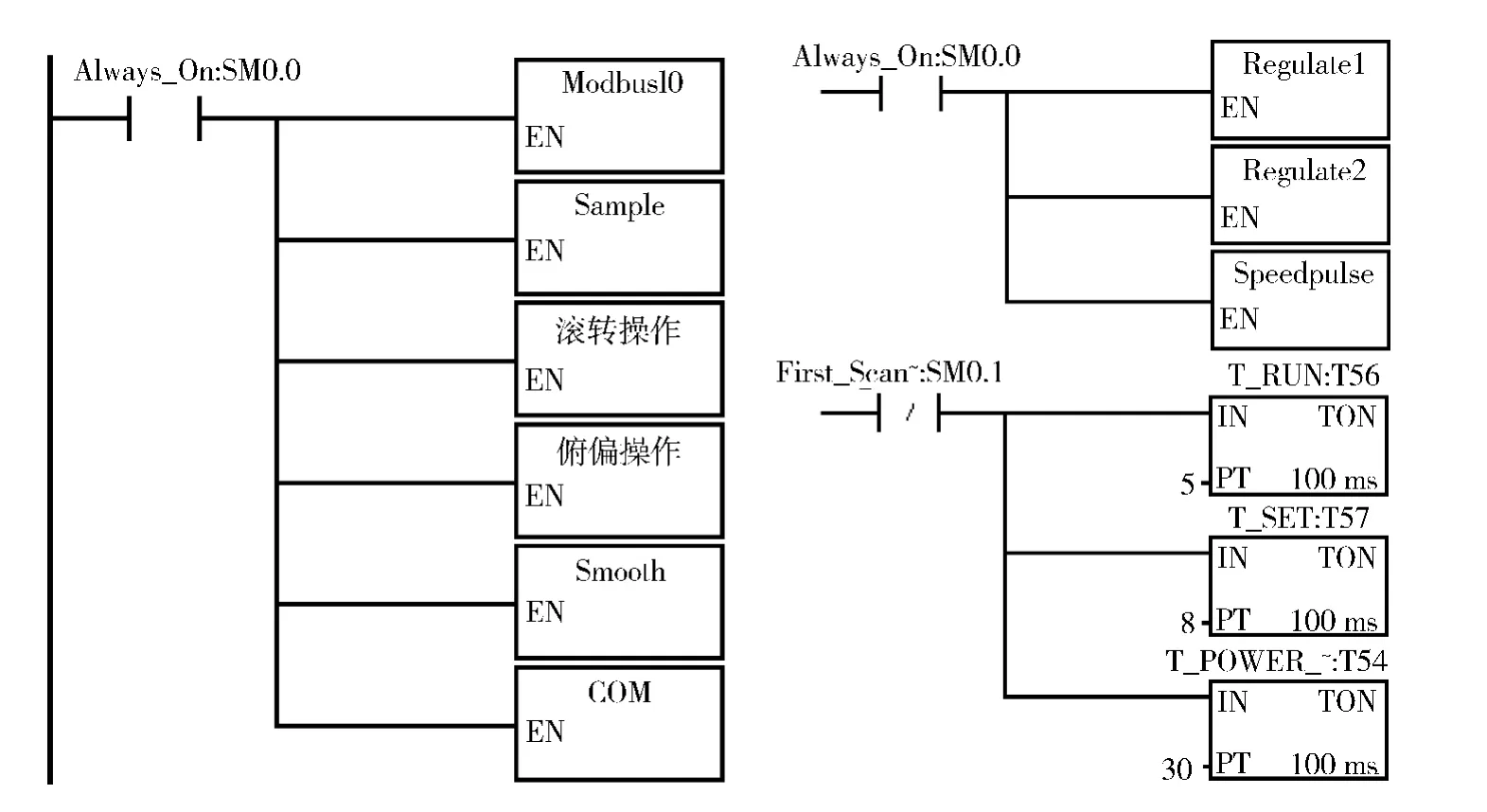
图5 主程序
3.2 PID控制程序
系统由于一开始数据采集直接取自信号反馈端,但由于干扰的原因,造成输出正弦波形毛刺太多,误差较大,故本系统PID控制采用了改进型积分分离算法,减小了信号传输过程因驱动系统造成的超调量,也改善了动态特性,其程序如图 6所示[1,5]。
3.3 摇摆台正弦波程序
利用PLC中的SIN指令,产生系统所需要的正弦波,以摆台俯偏动作为例,正弦波产生程序如图7所示。
3.4 步进电机启动细分控制程序
由于一方面在极端温度(尤其是在低温-40℃)下机械部件之间润滑油粘稠度增加,若按初始设定功率和扭矩会造成所需扭矩不足,易卡死;另外一方面在摇摆台带上航行器配重负载启动的一瞬间运行不畅并伴有异声,故在PLC程序中加入了启动细分控制程序,将俯偏程序中目标位移增量从正常运行时的0.2mm减少到启动时的0.01mm,通过增大扭矩,减小启动速度,很好地解决了上述问题,如图8为俯偏细分控制程序。
4 系统组态及上位机设计
4.1 组态设计
系统通过MCGS组态界面实现摇摆台手动控制,其功能有滚转启停、俯偏启停,滚转参数设置、摆动参数设置、俯偏点动及连续控制、滚转点动及连续控制,与PLC采用RS232通讯,数据校验方式采用偶校验,其人机界面如图9所示[6]。
4.2 系统上位机设计
系统上位机主要实现摇摆台自动运转及采集测试参数,以及远程控制摇摆台滚转和摆动动作。其上位机界面包含了“摇摆台测试”、“俯偏补偿”、“俯偏加速度回路”、“俯偏加速度模拟”、“俯偏稳定”、“俯偏限幅”、“自适应调参”、“最大舵偏角测试”和“报表打印”等9个界面,如图10为摇摆台测试主界面和俯偏稳定回路测试界面[7]。

图6 PID控制程序
主界面上位机程序为:


俯偏稳定回路上位机程序为:'发射后2秒前'Ulg=1



图7 俯偏动作正弦波程序模块

图8 俯偏细分启动控制程序
5 结论
本设计结合控制舱的测试要求,利用S7-200 226控制两路步进驱动系统,实现运动系统的摆动和滚转运动,在加载同等重量及重心的负载后,通过高温点火试验,可得到表2(其为高温测试的局部数据)测试数据,从实测数据可看出各项参数均满足了测试要求[8]。

图9 摇摆台组态界面

图10 上位机测试主界面及稳偏回路测试界面

表2 高温测试数据

图11 低温摆动和滚转测试曲线
同时在低温(连续在-40℃下冻结4h)试验,系统机械和电气部分运行顺畅,稳定,随机在4s内连续采集20000个数据(4个周期),通过启动细分,可看出曲线正弦波输出且平滑无毛刺,如图11所示,完全实现了设计要求。
[1] 张冬辉,毕树生,于靖军.一种新型电动复合力加载系统控制方法[J].航空动力学报,2013,28(1):54-59.(Zhang Donghui,Bi Shusheng,Yu Jingjun.A control method of novel electrical composite force loading system[J].Journal of Aerospace Power,2013,28(1):54-59.)
[2] 郑新,傅维贤,赵民.滚转弹道导弹运动规律与控制研究综述[J].航天控制,2011,29(1):93-98.(Zheng Xin,Fu Weixian,Zhao Min.A Control Method of Novel Electrical Composite Force Loading System[J].Aerospace Control,2011,29(1):93-98.)
[3] 罗中宝,杨志东,丛大成.2自由度驱动冗余摇摆台的设计[J]. 机器人,2012,34(5):574-580.(Luo Zhongbao,Yang Zhidong,Cong Dacheng.Design of 2DOF Motion Simulator with Actuation Redundancy[J].Robot,2012,34(5):574-580.)
[4] 宁月光,徐仕会,齐广峰.惯导系统动基座对准精度试验评估[J].海军航空工程学院学报,2011,26(1):64-66.(Ning Yueguang,Xu Shihui,Qi Guangfeng.The Test Evaluation of INS alignment precision on moving base[J].Journal of Naval Aeronautical and Astronautical University,2011,26(1):64-66.)
[5] 曹大劳,王永梅,卫平.新型三自由度摇摆台控制系统的设计和实现[J].火炮发射与控制学报,2008,9(3):56-59.(Cao Dalao,Wang Yongmei,Wei Ping.Design and realization of new type of 3-Axis swing bedstand control system[J].Journal of Gun Launch & Control,2008,9(3):56-59.)
[6] 田娟娟,蔡光起,史家顺.基于VB的PC机与S7—200PLC自由口通信的实现及应用[J].机械设计与制造,2007,7:115-117.(Tian Juanjuan,Cai Guangqi,Shi Jiashun.Based on VB PC with S7-200 PLC free the implementation and application of oral communication[J].Machinery Design & Manufacture,2007,7:115-117.)
[7] 邢满荣,张鹏,王晓冬.基于PLC和MCGS组态的机械手控制系统的设计[J].制造业自动化,2015,37(4):11-13,23.(Xing Manrong,Zhang Peng,Wang Xiaodong.The design of the manipulator control system based on PLC and MCGS[J].Manufacturing Automation,2015,37(4):11-13,23.)
[8] 王跃轩,陈俊杰,黄玉平.新型舵机负载模拟系统电动加载技术研究[J].航天控制,2014,32(2):78-86.(Wang Yuexuan,Chen Junjie,Huang Yuping.Research on electromechanical driving technology and development of novel rudder servo load simulator[J].Aerospace Control,2014,32(2):78-86.)
猜你喜欢
四川工商学院学术新视野(2021年2期)2021-11-02 06:17:18
装备制造技术(2020年4期)2020-12-25 05:26:02
电子制作(2019年7期)2019-04-25 13:18:18
测控技术(2018年12期)2018-11-25 09:37:42
电子制作(2016年21期)2016-05-17 03:53:12
电测与仪表(2015年11期)2015-04-09 11:46:30
武夷学院学报(2014年5期)2014-07-19 10:08:30
电测与仪表(2014年16期)2014-04-22 05:20:10
中国造纸(2014年1期)2014-03-01 02:10:04
铁路通信信号工程技术(2014年5期)2014-02-28 16:57:49
