广州地铁5号线AATTOO操纵节能优化研究和试验对比
2015-03-10 05:39:53王鹏
现代城市轨道交通 2015年1期
王 鹏
广州地铁5号线AATTOO操纵节能优化研究和试验对比
王 鹏
摘 要:广州地铁5号线为直线电机系统,结合直线电机运行效率不高、能量损耗大以及直线电机线路坡道大且多的特点,通过优化ATO操纵方式达到节能降耗的目的。并进行了能耗试验对比,节能效果良好。
关键词:直线电机;列车运行;节能;操纵策略;能耗对比试验
王 鹏:广州市地下铁道总公司,硕士,广东广州 510000
0 引言
直线电机车辆运载系统是20世纪90年代以后开始商业运营的。直线电机车辆具有爬坡能力强、转弯半径小、噪声低、断面小等优点。可以克服城市选线中的诸多困难,可轻松穿越既有线路、江、河,可方便地绕过建筑物。适用于地势起伏大、地形复杂的城市或地区。
由于直线电机的特殊结构,在车辆同等质量下,直线电机车辆的牵引能耗相对旋转电机车辆高。根据理论计算和试验测试结果,直线电机车辆的牵引能耗(单位人公里能耗)相对旋转电机车辆高30%左右[1]。因此,在发挥直线电机车辆运载系统优势的基础上,如何降低能耗,是直线电机车辆系统的一个重要研究课题。
1 列车自动运行(ATO)模式分析
广州地铁5号线的ATO操纵模式,每个区间都基本相似。只是受各区间的线路长度、曲线大小等影响,每个区间的限速和列车的最高速度会有所不同。列车从站台启动出发,依次经历加速阶段、平稳运行阶段、制动阶段,在下一站台对标停稳。
在平稳运行阶段,列车基本保持恒速运行。但是实际上,不可能保持速度不变,只是限制在较小的范围内波动。为保持恒速,ATO一般只施加较小的牵引力用于克服列车的阻力。如果出现速度过快的情况,就变为惰行或者制动状态,来使列车保持恒速。但是此种控制方式不太符合直线电机牵引系统的特点,会造成一定能量的浪费,其原因如下。
首先,直线电机气隙一般为9~12 mm(而旋转电机的气隙只有1 ~2 mm),再加上直线电机是有端部的(旋转电机是闭环),漏磁场较大,机电能量转化率低。所以,直线电机相对于旋转电机,效率和功率因数都较低,效率一般在0.7~0.8之间,功率因数一般在0.5~0.6之间[2]。而且在较低牵引力的情况下,直线电机的效率和功率因数会进一步降低。现有平稳运行阶段,为保持列车恒速而使直线电机牵引系统长时间工作在较低工作效率的情况下,并不经济。
其次,由于直线电机列车具有不受粘着的限制、爬坡能力强的特点,通常所设计的直线电机系统线路,坡道往往较多且较大(正线最大坡道5%)。当列车处于下坡时,重力的斜向分力如果大于阻力,列车速度会越来越大,ATO为使列车保持恒速,必须进行间歇制动或者持续制动。由于直线电机电制动转化效率同样较低,坡道的势能将得不到有效利用,实际上同样增大了系统的能耗。
再次,直线电机由于电感较大,励磁电流较大,励磁时间也较长,系统响应因而较慢。当从加速阶段向平稳运行阶段转换过程中,系统响应慢,容易造成列车速度过快,必须进行制动来使速度恢复稳定,整个过程增大了能耗。在平稳运行阶段,控制滞后也使系统容易受外部因素的干扰(例如坡道、弯道等),列车将由牵引状态短暂地变为制动状态,因而增大了能耗。
因此,考虑在平稳运行阶段列车的控制方式采用惰行与100%牵引间断操作,如图1所示,将更加适合直线电机系统特性,从而系统性地降低能耗。在此种方式中,平稳运行阶段,牵引状态的牵引力是100%,使直线电机工作在最大的效率和功率因数上,可提高牵引利用率。惰行和牵引间断操作,实际上是增大了速度的波动范围,将降低系统对坡道影响的敏感性,能更多地将坡道的势能转化为动能,而不是将势能消耗在制动上。惰行与牵引间断操作,使控制方式更为简单,能够很好地避免系统响应慢的问题。
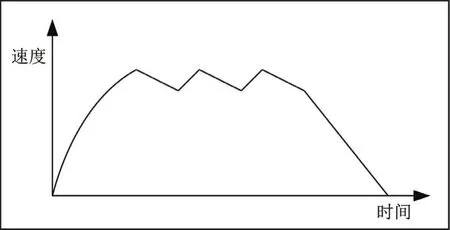
图1 平稳运行阶段采用惰行与100%牵引间断操作的方式
2 节能试验
针对ATO模式分析提出列车节能操作建议,通过现场试验,验证其节能效果。

图2 鱼珠—大沙地列车ATO运行曲线(紫色曲线为列车速度,青色曲线为牵引/制动指令值0~100%)
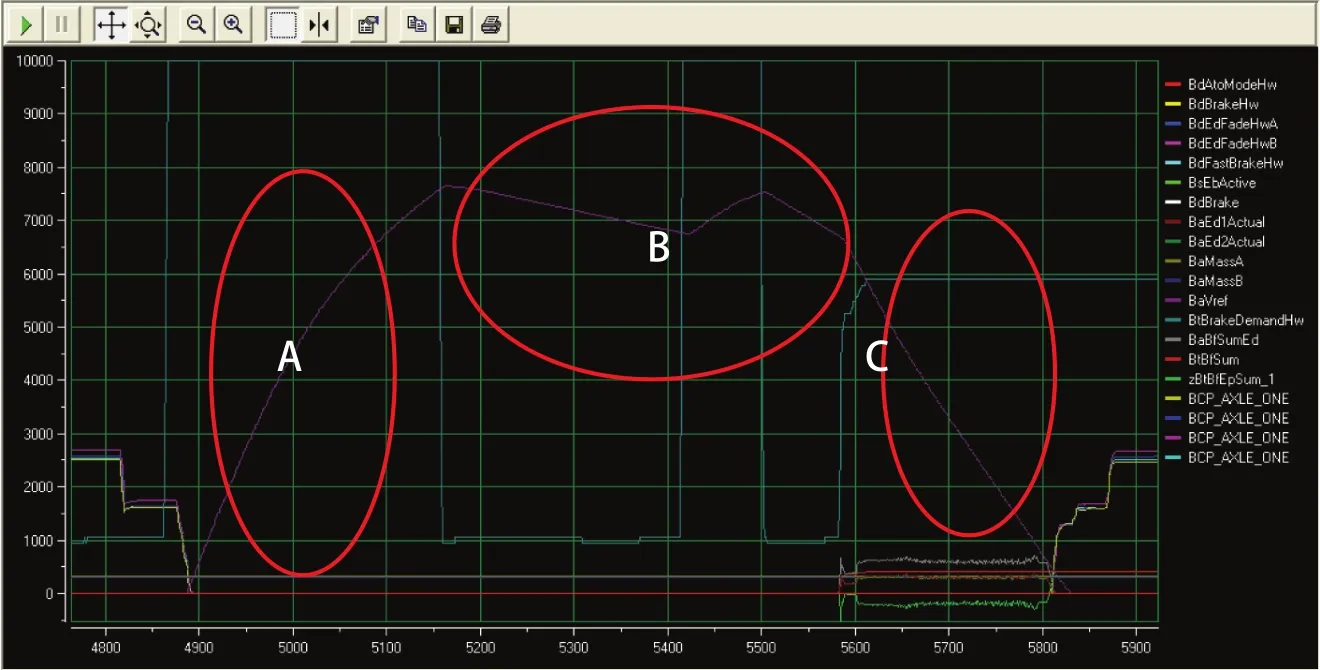
图3 鱼珠—大沙地列车人工控制运行曲线(紫色曲线为列车速度,青色曲线为牵引/制动指令值)
2.1试验方法
在相同的时间内,列车以ATO和人工控制(平稳运行阶段采用惰行与100%牵引间断操作)2种方式从同一车站运行到相同的下一车站。使用相同的测试设备、测试方法,进行数据采集。对比这2种运行方式的列车牵引能耗。
2.2ATO控制方式
ATO控制方式分为3个部分,加速阶段、平稳运行阶段、制动阶段,如图2所示是其中一个完整区间的曲线。加速阶段,如图2中A部分,ATO以100%牵引力牵引列车加速。当达到一定速度后,转入平稳运行阶段,如图2中B部分。最后转入制动阶段,如图2中C部分,列车贴近恒定减速度的速度曲线制动,直至在站台停稳。
2.3人工控制方式
人工控制同样分为3个部分,加速阶段、平稳运行阶段、制动阶段。加速阶段、制动阶段仿照ATO控制方式进行操作,为了便于司机现场操作,对其中进行了一些简化。平稳运行阶段则采用惰行与100%牵引间断操作。
(1)在加速阶段,列车100%牵引直到预定速度,如图3中A所示,取消了ATO控制中短暂降低牵引指令值的步骤。
(2)在平稳运行阶段,惰行与100%牵引间断操作,如图3中B所示。在此阶段,ATO控制,则是保持列车恒速。为使2种方式运行的时间相同,人工控制方式的列车最高速度要较ATO控制方式的高。
(3)在制动阶段,列车以恒定的50%指令值制动,直至停车,如图3中C所示。基本与ATO控制方式在此阶段的目标曲线斜率相当,且便于司机操作。
2.4数据采集方式
数据采集仪DAVA5000采集单节车的母线直流电压和母线直流电流,用以计算单节车的能耗。制动系统记录软件“Brake consult”记录列车牵引/制动的指令值(包括ATO指令值、人工控制指令值),以及列车运行的速度曲线。

表1 试验结果

图4 鱼珠—大沙地ATO运行条件下测得的电流曲线
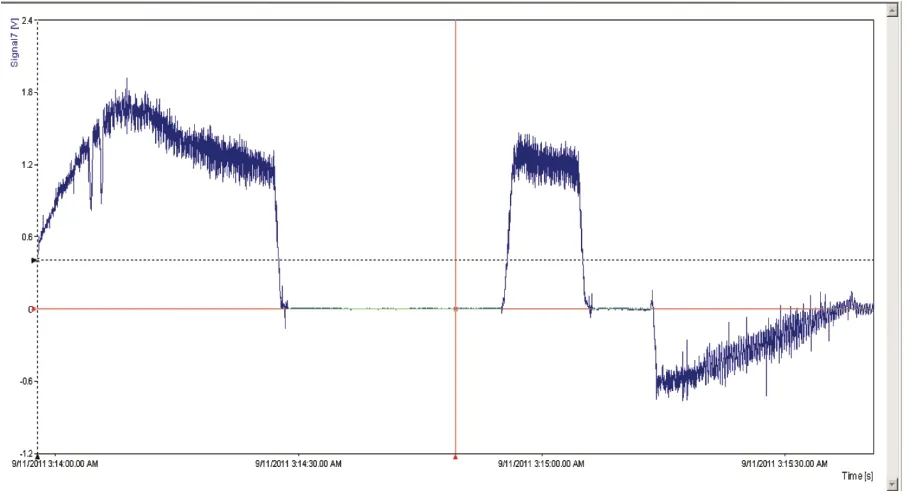
图5 鱼珠—大沙地人工控制运行条件下测得的电流曲线
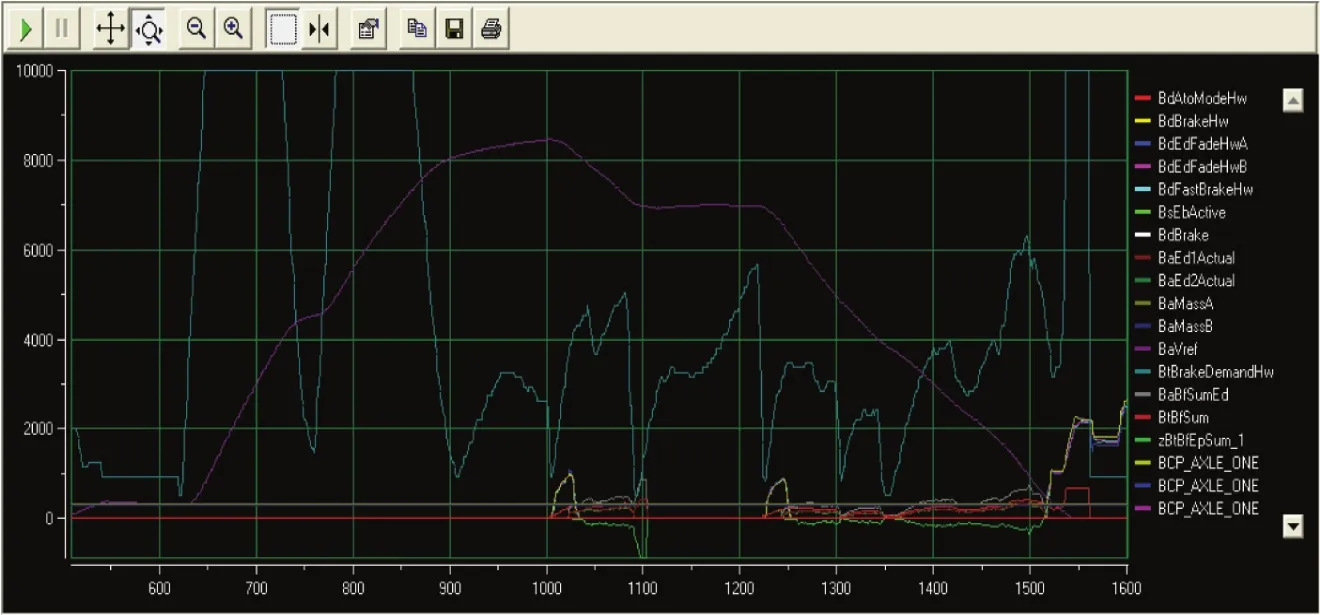
图6 员村—科韵路列车ATO控制运行曲线(紫色曲线为列车速度,青色曲线为牵引/制动指令值)
3 区间试验和能耗对比
在鱼珠—大沙地区间,列车以ATO方式从鱼珠站台启动,到大沙地站台停车为止,整个区间的运行时间约为96 s。以人工控制方式,列车从鱼珠站台启动,以100%牵引力加速到约77 km/h,转为惰行,当列车速度逐渐降到约67 km/h后,再次以100%牵引力加速至约77 km/h,然后转为惰行,列车将要进站前,以50%的恒定制动力制动,在大沙地站台停稳。整个区间的运行时间约为95 s。近似认为两者时间相等。
以相似的方式,也在员村—科韵路区间进行了试验。在2个区间、采用2种操纵方式的牵引能耗测试结果如表1所示。
从表1的测试结果可以看出,在近似相等的区间运行时间内,在区间最高速度提高不超过4 km/h的情况下,平稳运行阶段采用惰行与100%牵引间断操作方式,相对于现有ATO运行方式,都有不同程度的能耗节约。
鱼珠—大沙地区间,由于从鱼珠往大沙地方向线路总体处于上坡状态,加速时间较长,节约的能耗主要是由于:在平稳运行阶段改变了操作方式,提高了牵引利用率。员村—科韵路区间的线路总体处于U形,车站地势高且基本处于同一水平面上,中间地势低,节约的能耗,除提高牵引利用率外,还有效地利用了下坡的势能,节能效果因而更为明显。
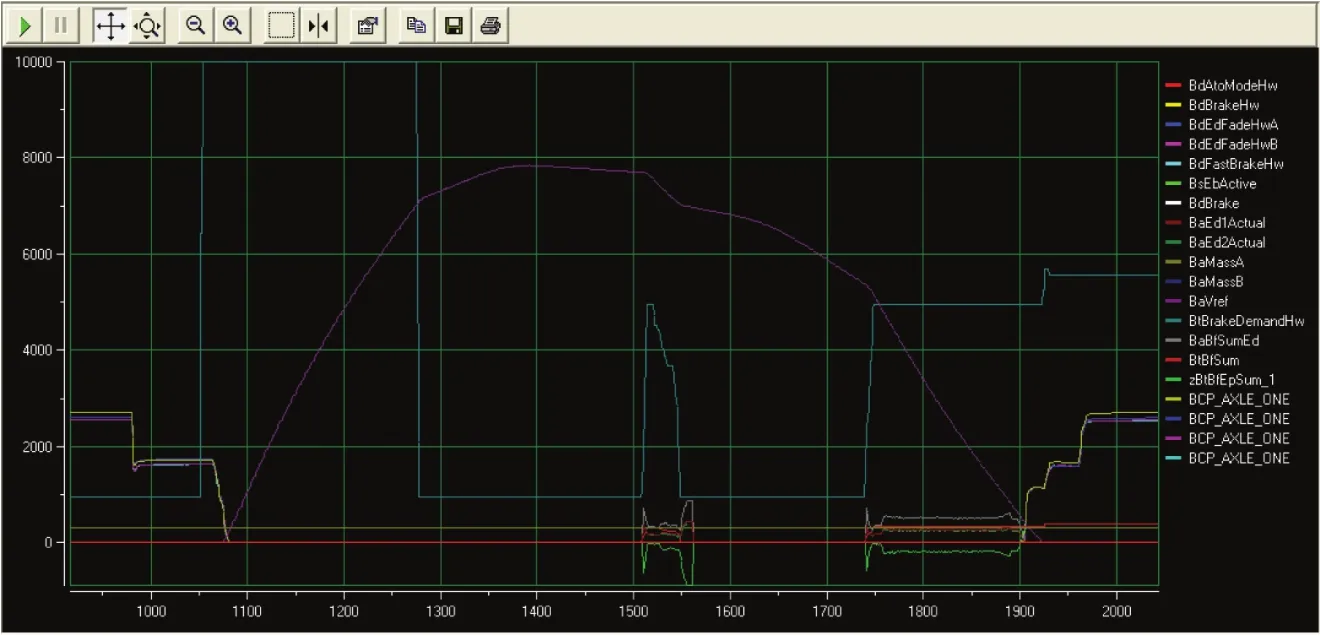
图7 员村—科韵路列车人工控制运行曲线(紫色曲线为列车速度,青色曲线为牵引/制动指令值)
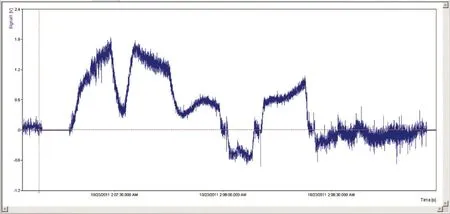
图8 员村—科韵路ATO运行条件下测得的电流曲线
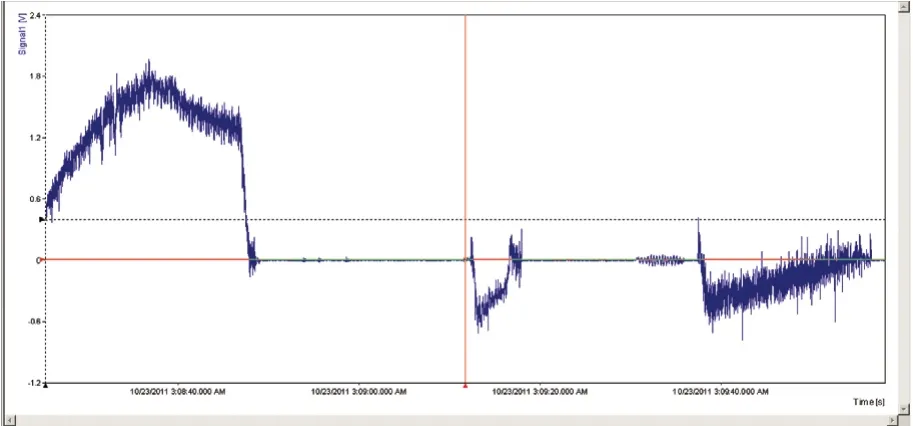
图9 员村—科韵路人工控制运行条件下测得的电流曲线
4 小结
综上所述,平稳运行阶段采用惰行与100%牵引间断人工操作方式,将能更好地适应直线电机的特性,以及直线电机线路的特点。相对于现有平稳运行阶段采用的恒速运行方式,不但提高了牵引效率,而且更有效地利用了坡道的势能,因而更加节能。
参考文献
[1] 吴冬华. 强迫风冷与自然风冷直线电机车辆能耗对比分析[J].铁道机车车辆,2008,28(增刊).
[2] 刘友梅,杨颖. 城轨交通的一种新模式——直线电机驱动地铁车辆[J]. 电力机车与城轨车辆,2003,26(4).
[3] 黄良骥,唐涛. 地铁列车自动驾驶系统分析与设计[J]. 北方交通大学学报,2002,26(3).
[4] 吴汶麒. 城市轨道交通信号与通信系统[M]. 北京:中国铁道出版社,1998.
[5] 李鲲鹏,张振生. 直线电机轨道交通系统能耗分析[G]//第四届中日直线电机轨道交通技术交流会主题报告汇编. 2007.
责任编辑 冒一平
Study and Tests Comparison of Energy Saving Optimization Operation on Guangzhou Metro Line 5
Wang Peng
Abstract:Guangzhou metro Line 5 uses the linear motor system. Taking into consideration of the characteristics that operating effi ciency of linear motor is not high, energy loss is big and line gradient is big and large in quantity, optimization of existing ATO mode. The energy consumption tests are analyzed and compared, having a good energy saving effect.
Keywords:linear motor, train operation, energy saving, control strategy, energy consumption comparison test
收稿日期2014-09-01
中图分类号:U268.6
猜你喜欢
铁道通信信号(2020年1期)2020-09-21 08:55:16
铁道通信信号(2018年10期)2018-12-06 09:35:04
中国科技博览(2016年19期)2016-10-19 13:10:22
中国科技博览(2016年19期)2016-10-19 12:51:06
中国科技博览(2016年18期)2016-10-19 11:23:00
中国科技博览(2016年18期)2016-10-19 07:47:05
科学与财富(2016年28期)2016-10-14 20:02:56
科技视界(2016年20期)2016-09-29 11:43:16
铁道通信信号(2016年8期)2016-06-01 12:10:21
中国铁道科学(2015年6期)2015-06-21 06:54:54